the Creative Commons Attribution 4.0 License.
the Creative Commons Attribution 4.0 License.
 | 12 Feb 2019
| 12 Feb 2019
DATeS: a highly extensible data assimilation testing suite v1.0
Ahmed Attia
Adrian Sandu
A flexible and highly extensible data assimilation testing suite, named DATeS, is described in this paper. DATeS aims to offer a unified testing environment that allows researchers to compare different data assimilation methodologies and understand their performance in various settings. The core of DATeS is implemented in Python and takes advantage of its object-oriented capabilities. The main components of the package (the numerical models, the data assimilation algorithms, the linear algebra solvers, and the time discretization routines) are independent of each other, which offers great flexibility to configure data assimilation applications. DATeS can interface easily with large third-party numerical models written in Fortran or in C, and with a plethora of external solvers.
- Article
(3575 KB) - Full-text XML
- BibTeX
- EndNote





Data assimilation (DA) refers to the fusion of information from different sources, including priors, predictions of a numerical model, and snapshots of reality, in order to produce accurate description of the state of a physical system of interest (Daley, 1993; Kalnay, 2003). DA research is of increasing interest for a wide range of fields including geoscience, numerical weather forecasts, atmospheric composition predictions, oil reservoir simulations, and hydrology. Two approaches have gained wide popularity for solving the DA problems, namely ensemble and variational approaches. The ensemble approach is rooted in statistical estimation theory and uses an ensemble of states to represent the underlying probability distributions. The variational approach, rooted in control theory, involves solving an optimization problem to obtain a single “analysis” as an estimate of the true state of the system of concern. The variational approach does not provide an inherent description of the uncertainty associated with the obtained analysis; however, it is less sensitive to physical imbalances prevalent in the ensemble approach. Hybrid methodologies designed to harness the best of the two worlds are an ongoing research topic.
Numerical experiments are an essential ingredient in the development of new DA algorithms. Implementation of numerical experiments for DA involves linear algebra routines, a numerical model along with time integration routines, and an assimilation algorithm. Currently available testing environments for DA applications are either very simplistic or very general; many are tied to specific models and are usually completely written in a specific language. A researcher who wants to test a new algorithm with different numerical models written in different languages might have to re-implement his/her algorithm using the specific settings of each model. A unified testing environment for DA is important to enable researchers to explore different aspects of various filtering and smoothing algorithms with minimal coding effort.
The DA Research Section (DAReS) at the National Center for Atmospheric Research (NCAR) provides Data Assimilation Research Testbed (DART) (Anderson et al., 2009) as a community facility for ensemble filtering. The DART platform is currently the gold standard for ensemble-based Kalman filtering algorithm implementations. It is widely used in both research and operational settings, and interfaces to most important geophysical numerical models are available. DART employs a modular programming approach and adheres strictly to solid software engineering principles. DART has a long history and is continuously well maintained; new ensemble-based Kalman filtering algorithms that appear in the literature are routinely added to its library. Moreover, it gives access to practical and well-established parallel algorithms. DART is, by design, very general in order to support operational settings with many types of geophysical models. Using DART requires a non-trivial learning overhead. The fact that DART is mainly written in Fortran makes it a very efficient testing platform; however, this limits to some extent the ability to easily employ third-party implementations of various components.
Matlab programs are often used to test new algorithmic ideas due to its ease of implementation. A popular set of Matlab tools for ensemble-based DA algorithms is provided by the Nansen Environmental and Remote Sensing Center (NERSC), with the code available from Evensen and Sakov (2009). A Matlab toolbox for uncertainty quantification (UQ) is UQLab (Marelli and Sudret, 2014). Also, for the newcomers to the DA field, a concise set of Matlab codes is provided through the pedagogical applied mathematics reference (Law et al., 2015). Matlab is generally a very useful environment for small- to medium-scale numerical experiments.
Python is a modern high-level programming language that gives the power of reusing existing pieces of code via inheritance, and thus its code is highly extensible. Moreover, it is a powerful scripting tool for scientific applications that can be used to glue legacy codes. This can be achieved by writing wrappers that can act as interfaces. Building wrappers around existing C and Fortran code is a common practice in scientific research. Several automatic wrapper generation tools, such as SWIG (Beazley, 1996) and F2PY (Peterson, 2009), are available to create proper interfaces between Python and lower-level languages. While translating Matlab code to Python is a relatively easy task, one can call Matlab functions from Python using the Matlab Engine API. Moreover, unlike Matlab, Python is freely available on virtually all Linux, macOS, and Windows platforms, and therefore Python software is easily accessible and has excellent portability. When using Python, instead of Fortran or C, one generally trades some computational performance for programming productivity. The performance penalty in the scientific calculations is minimized by delegating computationally intensive tasks to compiled languages such as Fortran. This approach is followed by the scientific computing Python modules NumPy and SciPy, which enable writing computationally efficient scientific Python code. Moreover, Python is one of the easiest programming languages to learn, even without background knowledge about programming.
This paper presents a highly extensible Python-based DA testing suite. The package is named DATeS and is intended to be an open-source, extendable package positioned between the simple typical research-grade implementations and the professional implementation of DART but with the capability to utilize large physical models. Researchers can use it as an experimental testing pad where they can focus on coding only their new ideas without worrying much about the other pieces of the DA process. Moreover, DATeS can be effectively used for educational purposes where students can use it as an interactive learning tool for DA applications. The code developed by a researcher in the DATeS framework should fit with all other pieces in the package with minimal to no effort, as long as the programmer follows the “flexible” rules of DATeS. As an initial illustration of its capabilities, DATeS has been used to implement and carry out the numerical experiments in Attia et al. (2018), Moosavi et al. (2018), and Attia and Constantinescu (2018).
The paper is structured as follows. Section 2 reviews the DA problem and the most widely used approaches to solve it. Section 3 describes the architecture of the DATeS package. Section 4 takes a user-centric and example-based approach for explaining how to work with DATeS, and Sect. 5 demonstrates the main guidelines of contributing to DATeS. Conclusions and future development directions are discussed in Sect. 6.
This section gives a brief overview of the basic discrete-time formulations of both statistical and variational DA approaches. The formulation here is far from conclusive and is intended only as a quick review. For detailed discussions on the various DA mathematical formulations and algorithms, see, e.g., Asch et al. (2016), Evensen (2009), and Law et al. (2015).
The main goal of a DA algorithm is to give an accurate representation of the “unknown” true state, xtrue(tk), of a physical system, at a specific time instant tk. Assuming is a discretized approximation of xtrue(tk), the time evolution of the physical system over the time interval is approximated by the discretized forward model:
The model-based simulations, represented by the model states, are inaccurate and must be corrected given noisy measurements Y of the physical system. Since the model state and observations are both contaminated with errors, a probabilistic formulation is generally followed. The prior distribution 𝒫b(xk) encapsulates the knowledge about the model state at time instant tk before additional information is incorporated. The likelihood function 𝒫(Y|xk) quantifies the deviation of the prediction of model observations from the collected measurements. The corrected knowledge about the system is described by the posterior distribution formulated by applying Bayes' theorem:
where Y refers to the data (observations) to be assimilated. In the sequential filtering context, Y is a single observation, while in the smoothing context, it generally stands for several observations to be assimilated simultaneously.
In the so-called “Gaussian framework”, the prior is assumed to be Gaussian , where is a prior state, e.g., a model-based forecast, and is the prior covariance matrix. Moreover, the observation errors are assumed to be Gaussian 𝒩(0, Rk), with being the observation error covariance matrix at time instant tk, and observation errors are assumed to be uncorrelated from background errors. In practical applications, the dimension of the observation space is much less than the state-space dimension, that is Nobs≪Nstate.
Consider assimilating information available about the system state at time instant tk, the posterior distribution follows from Eq. (2) as
where the scaling factor 𝒫(yk) is dropped. Here, ℋk is an observation operator that maps a model state xk into the observation space.
Applying Eqs. (2) or (3), in large-scale settings, even under the simplified Gaussian assumption, is not computationally feasible. In practice, a Monte Carlo approach is usually followed. Specifically, ensemble-based sequential filtering methods such as ensemble Kalman filter (EnKF) (Tippett et al., 2003; Whitaker and Hamill, 2002; Burgers et al., 1998; Houtekamer and Mitchell, 1998; Zupanski et al., 2008; Sakov et al., 2012; Evensen, 2003; Hamill and Whitaker, 2001; Evensen, 1994; Houtekamer and Mitchell, 2001; Smith, 2007) and maximum likelihood ensemble filter (MLEF) (Zupanski, 2005) use ensembles of states to represent the prior, and the posterior distribution. A prior ensemble , approximating the prior distributions, is obtained by propagating analysis states from a previous assimilation cycle at time tk−1 by applying Eq. (1). Most of the ensemble-based DA methodologies work by transforming the prior ensemble into an ensemble of states collected from the posterior distribution, namely the analysis ensemble. The transformation in the EnKF framework is applied following the update equations of the well-known Kalman filter (Kalman and Bucy, 1961; Kalman, 1960). An estimate of the true state of the system, i.e., the analysis, is obtained by averaging the analysis ensemble, while the posterior covariance is approximated by the covariance matrix of the analysis ensemble.
The maximum a posteriori (MAP) estimate of the true state is the state that maximizes the posterior probability density function (PDF). Alternatively, the MAP estimate is the minimizer of the negative logarithm (negative log) of the posterior PDF. The MAP estimate can be obtained by solving the following optimization problem:
This formulates the three-dimensional variational (3D-Var) DA problem. Derivative-based optimization algorithms used to solve Eq. (4) require the derivative of the negative log of the posterior PDF Eq. (4):
where is the sensitivity (e.g., the Jacobian) of the observation operator ℋk evaluated at xk. Unlike ensemble filtering algorithms, the optimal solution of Eq. (4) provides a single estimate of the true state and does not provide a direct estimate of associated uncertainty.
Assimilating several observations simultaneously requires adding time as a fourth dimension to the DA problem. Let 𝒫b(x0) be the prior distribution of the system state at the beginning of a time window [t0, tF] over which the observations are distributed. Assuming the observations' errors are temporally uncorrelated, the posterior distribution of the system state at the initial time of the assimilation window t0 follows by applying Eq. (2) as
In the statistical approach, ensemble-based smoothers such as the ensemble Kalman smoother (EnKS) are used to approximate the posterior Eq. (6) based on an ensemble of states. Similar to the ensemble filters, the analysis ensemble generated by a smoothing algorithm can be used to provide an estimate of the posterior first-order moment. It also can be used to provide a flow-dependent ensemble covariance matrix to approximate the posterior true second-order moment.
The MAP estimate of the true state at the initial time of the assimilation window can be obtained by solving the following optimization problem:
This is the standard formulation of the four-dimensional variational (4D-Var) DA problem. The solution of the 4D-Var problem is equivalent to the MAP of the smoothing posterior in the Gaussian framework. The Jacobian of Eq. (7) with respect to the model state at the initial time of the assimilation window reads
where is the adjoint of the tangent linear model operator, and is the adjoint of the observation operator sensitivity. Similar to the 3D-Var case (Eq. 4), the solution of Eq. (7) provides a single best estimate (the analysis) of the system state without providing consistent description of the uncertainty associated with this estimate. The variational problem (Eq. 7) is referred to as strong-constraint formulation, where a perfect-model approach is considered. In the presence of model errors, an additional term is added, resulting in a weak-constraint formulation. A general practice is to assume that the model errors follow a Gaussian distribution 𝒩(0, Qk), with being the model error covariance matrix at time instant tk. In non-perfect-model settings, an additional term characterizing state deviations is added to the variational objectives (Eqs. 4, 7). The model error term depends on the approach taken to solve the weak-constraint problem, and usually involves the model error probability distribution.
In idealized settings, where the model is linear, the observation operator is linear, and the underlying probability distributions are Gaussian, the posterior is also Gaussian; however, this is rarely the case in real applications. In nonlinear or non-Gaussian settings, the ultimate objective of a DA algorithm is to sample all probability modes of the posterior distribution, rather than just producing a single estimate of the true state. Algorithms capable of accommodating non-Gaussianity are too limited and have not been successfully tested in large-scale settings.
Particle filters (PFs) (Doucet et al., 2001; Gordon et al., 1993; Kitagawa, 1996; Van Leeuwen, 2009) are an attractive family of nonlinear and non-Gaussian methods. This family of filters is known to suffer from filtering degeneracy, especially in large-scale systems. Despite the fact that PFs do not force restrictive assumptions on the shape of the underlying probability distribution functions, they are not generally considered to be efficient without expensive tuning. While particle filtering algorithms have not yet been used operationally, their potential applicability for high-dimensional problems is illustrated, for example, by Rebeschini and Van Handel (2015), Poterjoy (2016), Llopis et al. (2018), Beskos et al. (2017), Potthast et al. (2018), Ades and van Leeuwen (2015), and Vetra-Carvalho et al. (2018). Another approach for non-Gaussian DA is to employ a Markov chain Monte Carlo (MCMC) algorithm to directly sample the probability modes of the posterior distribution. This, however, requires an accurate representation of the prior distribution, which is generally intractable in this context. Moreover, following a relaxed, e.g., Gaussian, prior assumption in nonlinear settings might be restrictive when a DA procedure is applied sequentially over more than one assimilation window. This is mainly due to fact that the prior distribution is a nonlinear transformation of the posterior of a previous assimilation cycle. Recently, an MCMC family of fully non-Gaussian DA algorithms that works by sampling the posterior were developed in Attia and Sandu (2015), Attia et al. (2015, 2017a, b, 2018), and Attia (2016). This family follows a Hamiltonian Monte Carlo (HMC) approach for sampling the posterior; however, the HMC sampling scheme can be easily replaced with other algorithms suitable for sampling complicated, and potentially multimodal, probability distributions in high-dimensional state spaces. Relaxing the Gaussian prior assumption is addressed in Attia et al. (2018), where an accurate representation of the prior is constructed by fitting a Gaussian mixture model (GMM) to the forecast ensemble.
DATeS provides standard implementations of several flavors of the algorithms mentioned here. One can easily explore, test, or modify the provided implementations in DATeS, and add more methodologies. As discussed later, one can use existing components of DATeS, such as the implemented numerical models, or add new implementations to be used by other components of DATeS. However, it is worth mentioning that the initial version of DATeS (v1.0) is not meant to provide implementations of all state-of-the-art DA algorithms; see, e.g., Vetra-Carvalho et al. (2018). DATeS, however, provides an initial seed with example implementations, those could be discussed and enhanced by the ever-growing community of DA researchers and experts. In the next section, we provide a brief technical summary of the main components of DATeS v1.0.
DATeS seeks to capture, in an abstract form, the common elements shared by most DA applications and solution methodologies. For example, the majority of the ensemble filtering methodologies share nearly all the steps of the forecast phase, and a considerable portion of the analysis step. Moreover, all the DA applications involve common essential components such as linear algebra routines, model discretization schemes, and analysis algorithms.
Existing DA solvers have been implemented in different languages. For example, high-performance languages such as Fortran and C have been (and are still being) extensively used to develop numerically efficient model implementations and linear algebra routines. Both Fortran and C allow for efficient parallelization because these two languages are supported by common libraries designed for distributed memory systems such as MPI and shared memory libraries such as Pthreads and OpenMP. To make use of these available resources and implementations, one has to either rewrite all the different pieces in the same programming language or have proper interfaces between the different new and existing implementations.
The philosophy behind the design of DATeS is that “a unified DA testing suite has to be open-source, easy to learn, and able to reuse and extend available code with minimal effort”. Such a suite should allow for easy interfacing with external third-party code written in various languages, e.g., linear algebra routines written in Fortran, analysis routines written in Matlab, or “forecast” models written in C. This should help the researchers to focus their energy on implementing and testing their own analysis algorithms. The next section details several key aspects of the DATeS implementation.
3.1 DATeS architecture
The DATeS architecture abstracts, and provides a set of modules of, the four generic components of any DA system. These components are the linear algebra routines, a forecast computer model that includes the discretization of the physical processes, error models, and analysis methodologies. In what follows, we discuss each of these building blocks in more detail, in the context of DATeS. We start with an abstract discussion of each of these components, followed by technical descriptions.
3.1.1 Linear algebra routines
The linear algebra routines are responsible for handling the data structures representing essential entities such as model state vectors, observation vectors, and covariance matrices. This includes manipulating an instance of the corresponding data. For example, a model state vector should provide methods for accessing/slicing and updating entries of the state vector, a method for adding two state vector instances, and methods for applying specific scalar operations on all entries of the state vector such as evaluating the square root or the logarithm.
3.1.2 Forecast model
The forecast computer model simulates a physical phenomena of interest such as the atmosphere, ocean dynamics, and volcanoes. This typically involves approximating the physical phenomena using a gridded computer model. The implementation should provide methods for creating and manipulating state vectors and state-size matrices. The computer model should also provide methods for creating and manipulating observation vectors and observation-size matrices. The observation operator responsible for mapping state-size vectors into observation-size vectors should be part of the model implementation as well. Moreover, simulating the evolution of the computer model in time is carried out using numerical time integration schemes. The time integration scheme can be model-specific and is usually written in a high-performance language for efficiency.
3.1.3 Error models
It is common in DA applications to assume a perfect forecast model, a case where the model is deterministic rather than stochastic. However, the background and observation errors need to be treated explicitly, as they are essential in the formulation of nearly all DA methodologies. We refer to the DATeS entity responsible for managing and creating random vectors, sampled from a specific probability distribution function, as the “error model”. For example, a Gaussian error model would be completely set up by providing the first- and second-order moments of the probability distribution it represents.
3.1.4 Analysis algorithms
Analysis algorithms manipulate model states and observations by applying widely used mathematical operations to perform inference operations. The popular DA algorithms can be classified into filtering and smoothing categories. An assimilation algorithm, a filter or a smoother, is implemented to carry out a single DA cycle. For example, in the filtering framework, an assimilation cycle refers to assimilating data at a single observation time by applying a forecast and an analysis step. On the other hand, in the smoothing context, several observations available at discrete time instances within an assimilation window are processed simultaneously in order to update the model state at a given time over that window; a smoother is designed to carry out the assimilation procedure over a single assimilation window. For example, EnKF and 3D-Var fall in the former category, while EnKS and 4D-Var fall in the latter.
3.1.5 Assimilation experiments
In typical numerical experiments, a DA solver is applied for several consecutive cycles to assess its long-term performance. We refer to the procedure of applying the solver to several assimilation cycles as the “assimilation process”. The assimilation process involves carrying out the forecast and analysis cycles repeatedly, creating synthetic observations or retrieving real observations, updating the reference solution when available, and saving experimental results between consecutive assimilation cycles.
3.1.6 DATeS layout
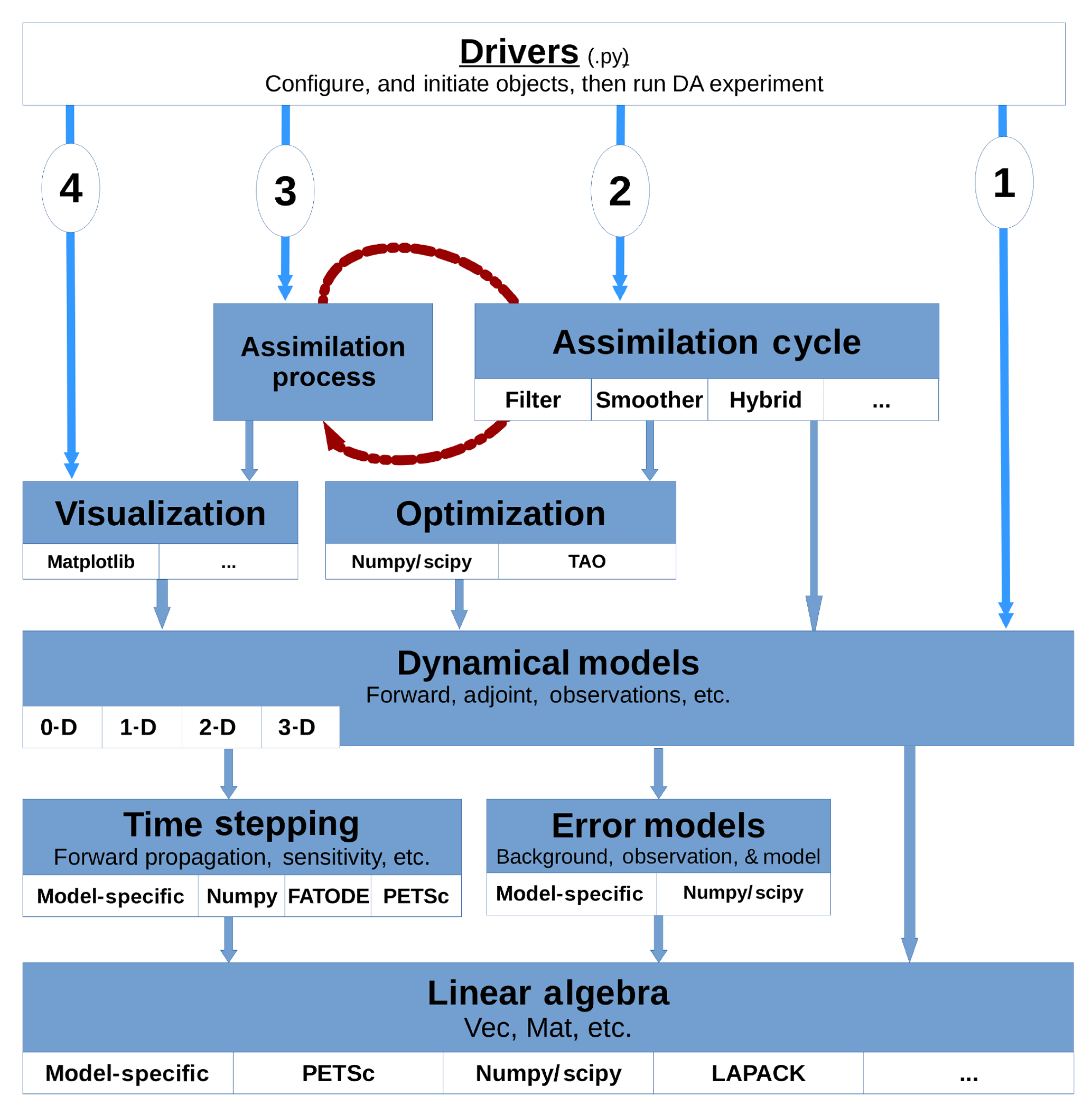
The design of DATeS takes into account the distinction between these components and separates them in design following an object-oriented programming (OOP) approach. A general description of DATeS architecture is given in Fig. 1.
The enumeration in Fig. 1 (numbers from 1 to 4 in circles) indicates the order in which essential DATeS objects should be created. Specifically, one starts with an instance of a model. Once a model object is created, an assimilation object is instantiated, and the model object is passed to it. An assimilation process object is then instantiated, with a reference to the assimilation object passed to it. The assimilation process object iterates the consecutive assimilation cycles and saves and/or outputs the results which can be optionally analyzed later using visualization modules.
All DATeS components are independent so as to maximize the flexibility in experimental design. However, each newly added component must comply with DATeS rules in order to guarantee interoperability with the other pieces in the package. DATeS provides base classes with definitions of the necessary methods. A new class added to DATeS, for example, to implement a specific new model, has to inherit the appropriate model base class and provide implementations of the inherited methods from that base class.
In order to maximize both flexibility and generalizability, we opted to handle configurations, inputs, and output of DATeS object using “configuration dictionaries”. Parameters passed to instantiate an object are passed to the class constructor in the form of key-value pairs in the dictionaries. See Sect. 4 for examples on how to properly configure and instantiate DATeS objects.
3.2 Linear algebra classes
The main linear algebra data structures essential for almost all DA aspects are (a) model state-size and observation-size vectors (also named state and observation vectors, respectively), and (b) state-size and observation-size matrices (also named state and observation matrices, respectively). A state matrix is a square matrix of order equal to the model state-space dimension. Similarly, an observation matrix is a square matrix of order equal to the model observation space dimension. DATeS makes a distinction between state and observation linear algebra data structures. It is important to recall here that, in large-scale applications, full state covariance matrices cannot be explicitly constructed in memory. Full state matrices should only be considered for relatively small problems and for experimental purposes. In large-scale settings, where building state matrices is infeasible, low-rank approximations or sparse representation of the covariance matrices could be incorporated. DATeS provides simple classes to construct sparse state and observation matrices for guidance.
Table 1DA filtering routines provided by the initial version of DATeS (v1.0).
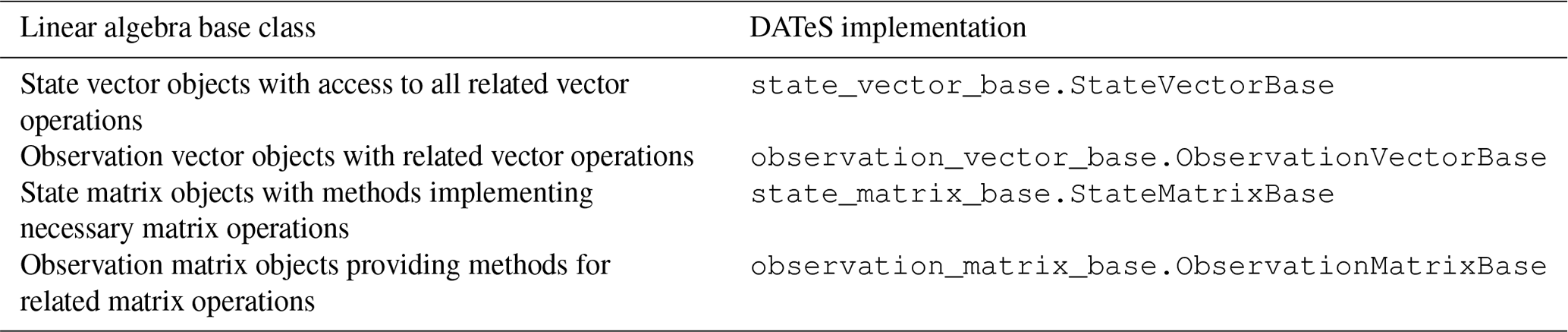
Third-party linear algebra routines can have widely different interfaces and underlying data structures. For reusability, DATeS provides unified interfaces for accessing and manipulating these data structures using Python classes. The linear algebra classes are implemented in Python. The functionalities of the associated methods can be written either in Python or in lower-level languages using proper wrappers. A class for a linear algebra data structure enables updating, slicing, and manipulating an instance of the corresponding data structures. For example, a model state vector class provides methods that enable accessing/slicing and updating entries of the state vector, a method for adding two state vector instances, and methods for applying specific scalar operations on all entries of the state vector such as evaluating the square root or the logarithm. Once an instance of a linear algebra data structure is created, all its associated methods are accessible via the standard Python dot operator. The linear algebra base classes provided in DATeS are summarized in Table 1.
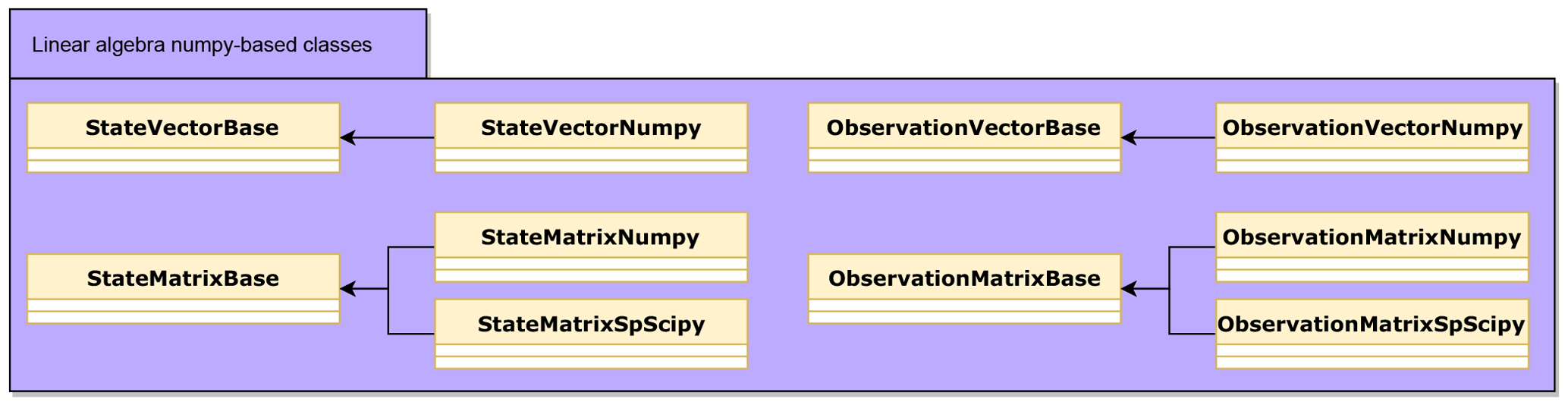
Figure 2Python implementation of state vector, observation vector, state matrix, and observation matrix data structures. Both dense and sparse state and observation matrices are provided.
Python special methods are provided in a linear algebra class to enable
iterating a linear algebra data structure entries. Examples of these special
methods include__getitem__( ),
__setitem__( ), __getslice__( ),
__setslice__( ), etc. These operators make it feasible to
standardize working with linear algebra data structures implemented in
different languages or saved in memory in different forms.
DATeS provides linear algebra data structures represented as NumPy ndarrays, and a set of NumPy-based classes to manipulate them. Moreover, SciPy-based implementation of sparse matrices is provided and can be used efficiently in conjunction with both sparse and non-sparse data structures. These classes, shown in Fig. 2, provide templates for designing more sophisticated extensions of the linear algebra classes.
(Lorenz, 1963)(Lorenz, 1996)(Gustafsson, 1971; Navon and De-Villiers, 1986)(Sakov and Oke, 2008)Table 2DA filtering routines provided by the initial version of DATeS (v1.0).

3.3 Forecast model classes
Each numerical model needs an associated class providing methods to access
its functionality. The unified forecast model class design in DATeS provides
the essential tasks that can be carried out by the model implementation. Each
model class in DATeS has to inherit the model base class:
models_base.ModelBase or a class derived from it. A numerical
model class is required to provide access to the underlying linear algebra
data structures and time integration routines. For example, each model class
has to provide the method state_vector( ) that creates an instance
of a state vector class, and the method integrate_state( ) that
takes a state vector instance and time integration settings, and returns a
trajectory (list of states) evaluated at specified future times. The base
class provided in DATeS contains definitions of all the methods that need to
be supported by a numerical model class. The package DATeS v1.0 includes
implementations of several popular test models summarized in
Table 2.
While some linear algebra and the time integration routines are
model-specific, DATeS also implements general-purpose linear algebra classes
and time integration routines that can be reused by newly created models. For
example, the general integration class FatODE_ERK_FWD is based on
FATODE (Zhang and Sandu, 2014) explicit Runge–Kutta (ERK) forward propagation
schemes.
3.4 Error model classes
In many DA applications, the errors are additive and are modeled by random
variables normally distributed with zero mean and a given or an unknown
covariance matrix. DATeS implements NumPy-based functionality for
background, observation, and model errors as guidelines for more
sophisticated problem-dependent error models. The NumPy-based error models in
DATeS are implemented in the module error_models_numpy. These
classes are derived from the base class ErrorsModelBase and provide
methodologies to sample the underlying probability distribution, evaluate the
value of the density function, and generate statistics of the error variables
based on model trajectories and the settings of the error model. Note that,
while DATeS provides implementations for Gaussian error models, the Gaussian
assumption itself is not restrictive. Following the same structure, or by
inheritance, one can easily create non-Gaussian error models with minimal
efforts. Moreover, the Gaussian error models provided by DATeS support both
correlated and uncorrelated errors, and it constructs the covariance matrices
accordingly. The covariance matrices are stored in appropriate sparse
formats, unless a dense matrix is explicitly requested. Since these
covariance matrices are either state or observation matrices, they provide
access to all proper linear algebra routines. This means that the code
written with access to an observation error model and its components should
work for both correlated and uncorrelated observations.
Table 3DA filtering routines provided by the initial version of DATeS v1.0.

3.5 Assimilation classes
Assimilation classes are responsible for carrying out a single assimilation
cycle (i.e., over one assimilation window) and optionally printing or writing
the results to files. For example, an EnKF object should be designed to carry
out one cycle consisting of the “forecast” and the “analysis” steps. The
basic assimilation objects in DATeS are a filtering object, a smoothing
object, and a hybrid object. DATeS provides the common functionalities for
filtering objects in the base class filters_base.FiltersBase; all
derived filtering classes should have it as a super class. Similarly,
smoothing objects are to be derived from the base class
smoothers_base.SmoothersBase. A hybrid object can inherit methods
from both filtering and smoothing base classes.
A model object is passed to the assimilation object constructor via configuration dictionaries to give the assimilation object access to the model-based data structures and functionalities. The settings of the assimilation object, such as the observation time, the assimilation time, the observation vector, and the forecast state or ensemble, are also passed to the constructor upon instantiation and can be updated during runtime.
Table 3 summarizes the filters implemented in the initial version of the package, which is DATeS v1.0. Each of these filtering classes can be instantiated and run with any of the DATeS model objects. Moreover, DATeS provides simplified implementations of both 3D-Var and 4D-Var assimilation schemes. The objective function, e.g., the negative log posterior, and the associated gradient are implemented inside the smoother class and require the tangent linear model to be implemented in the passed forecast model class. The adjoint is evaluated using FATODE following a checkpointing approach, and the optimization step is carried out using SciPy optimization functions. The settings of the optimizer can be fine-tuned via the configuration dictionaries. The 3D- and 4D-Var implementations provided by DATeS are experimental and are provided as a proof of concept. The variational aspects of DATeS are being continuously developed and will be made available in future releases of the package.
Covariance inflation and localization are ubiquitously used in all ensemble-based assimilation systems. These two methods are used to counteract the effect of using ensembles of finite size. Specifically, covariance inflation counteracts the loss of variance incurred in the analysis step and works by inflating the ensemble members around their mean. This is carried out by magnifying the spread of ensemble members around their mean by a predefined inflation factor. The inflation factor could be a scalar, i.e., space–time independent, or even varied over space and/or time. Localization, on the other hand, mitigates the accumulation of long-range spurious correlations. Distance-based covariance localization is widely used in geoscientific sciences, and applications, where correlations are damped out with increasing distance between grid points. The performance of the assimilation algorithm is critically dependent on tuning the parameters of these techniques. DATeS provide basic utility functions (see Sect. 3.7) for carrying out inflation and localization which can be used in different forms based on the specific implementation of the assimilation algorithms. The work in Attia and Constantinescu (2018) reviews inflation and localization and presents a framework for adaptive tuning of the parameters of these techniques, with all implementations and numerical experiments carried out entirely in DATeS.

3.6 Assimilation process classes
A common practice in sequential DA experimental settings is to repeat an assimilation cycle over a given time span, with similar or different settings at each assimilation window. For example, one may repeat a DA cycle on several time intervals with different output settings, e.g., to save and print results only every fixed number of iterations. Alternatively, the DA process can be repeated over the same time interval with different assimilation settings to test and compare results. We refer to this procedure as an “assimilation process”. Examples of numerical comparisons, carried out using DATeS, can be found in Attia et al. (2018) and Attia and Constantinescu (2018), and in Sect. 4.6.
assimilation_process_base.Assimilation Process
is the base class from which all assimilation process objects are derived.
When instantiating an assimilation process object, the assimilation object,
the observations, and the assimilation time instances are passed to the
constructor through configuration dictionaries. As a result, the assimilation
process object has access to the model and its associated data structures and
functionalities through the assimilation object.
The assimilation process object either retrieves real observations or creates synthetic observations at the specified time instances of the experiment. Figure 3 summarizes DATeS assimilation process functionality.
3.7 Utility modules
Utility modules provide additional functionality, such as the
_utility_configs module which provides functions for reading,
writing, validating, and aggregating configuration dictionaries. In DA, an
ensemble is a collection of state or observation vectors. Ensembles are
represented in DATeS as lists of either state or observation vector objects.
The utility modules include functions responsible for iterating over
ensembles to evaluate ensemble-related quantities of interest, such as
ensemble mean, ensemble variance/covariance, and covariance trace. Covariance
inflation and localization are critically important for nearly all
ensemble-based assimilation algorithms. DATeS abstracts tools and functions
common to assimilation methods, such as inflation and localization, where they
can be easily imported and reused by newly developed assimilation routines.
The utility module in DATeS provides methods to carry out these procedures in
various modes, including state-space and observation space localization.
Moreover, DATeS supports space-dependent covariance localization; i.e., it
allows varying the localization radii and inflation factors over both space
and time.
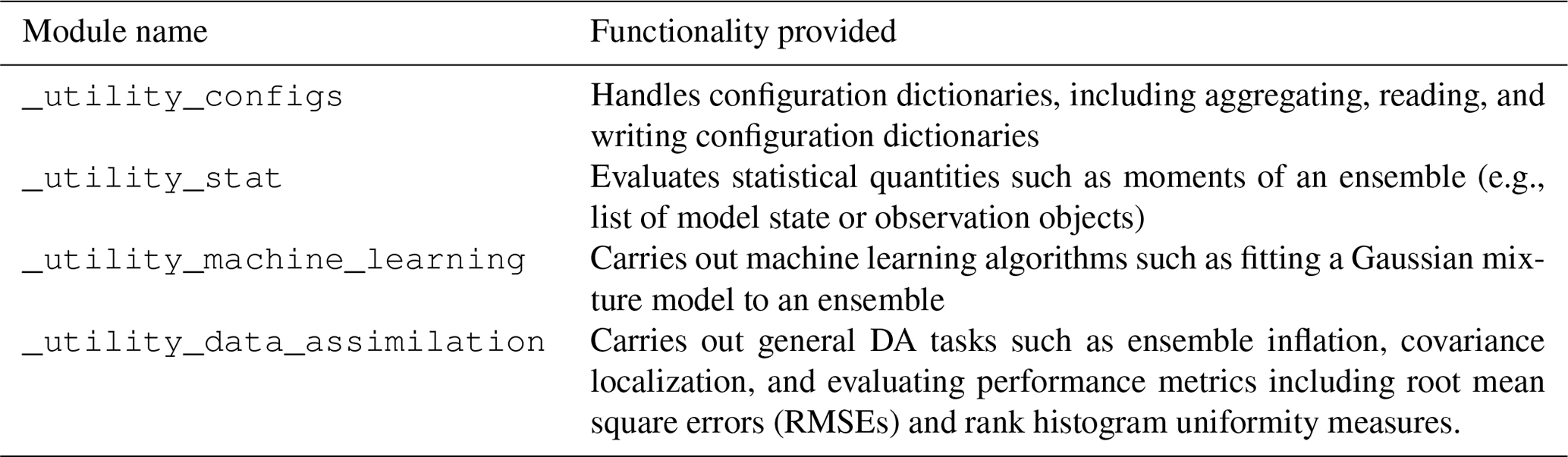
Table 4A sample of the modules wrapped by the main utility module
dates_utility.
Ensemble-based assimilation algorithms often require matrix representation of ensembles of model states. In DATeS, ensembles are represented as lists of states, rather than full matrices of size Nstate×Nens. However, it provides utility functions capable of efficiently calculating ensemble statistics, including ensemble variances, and covariance trace. Moreover, DATeS provides matrix-free implementations of the operations that require ensembles of states, such as a matrix–vector product, where the matrix is involved in a representation of an ensemble of states.

The module dates_utility provides access to all utility functions
in DATeS. In fact, this module wraps the functionality provided by several
other specialized utility routines, including the sample given in
Table 4. The utility module provides other general
functions such as handling file downloading, and functions for file I/O.
For a list of all functions in the utility module, see the user
manual (Attia et al., 2016).

The sequence of steps needed to run a DA experiment in DATeS is summarized in Fig. 4. This section is devoted to explaining these steps in the context of a working example that uses the QG-1.5 model (Sakov and Oke, 2008) and carries out DA using a standard EnKF formulation.
4.1 Step1: initialize DATeS
Initializing a DATeS run involves defining the root directory of DATeS as an environment variable and adding the paths of DATeS source modules to the system path. This can be done by executing the code snippet in Fig. 5 in the DATeS root directory.
4.2 Step2: create a model object
QG-1.5 is a nonlinear 1.5-layer reduced-gravity QG model with double-gyre wind forcing and biharmonic friction (Sakov and Oke, 2008).
4.2.1 Quasi-geostrophic model
This model is a numerical approximation of the equations
where and ψ is the surface elevation. The values of the model coefficients in Eq. (9) are obtained from Sakov and Oke (2008) and are described as follows: F=1600, , and . The domain of the model is a 1×1 (space units) square, with , , and is discretized by a grid of size 129×129 (including boundaries). The boundary conditions used are . The dimension of the model state vector is Nstate=16 641. This is a synthetic model where the scales are not relevant, and we use generic space, time, and solution amplitude units. The time integration scheme used is the fourth-order Runge–Kutta scheme with a time step of 1.25 (time units). The model forward propagation core is implemented in Fortran. The QG-1.5 model is run over 1000 model time steps, with observations made available every 10 time steps.

4.2.2 Observations and observation operators
We use a standard linear operator to observe 300 components of ψ with observation error variance set to 4.0 (units squared). The observed components are uniformly distributed over the state vector length, with an offset that is randomized at each filtering cycle. Synthetic observations are obtained by adding white noise to measurements of the sea surface height level (SSH) extracted from a reference model run with lower viscosity. To create a QG model object with these specifications, one executes the code snippet in Fig. 6.
4.3 Step3: create an assimilation object
One now proceeds to create an assimilation object. We consider a deterministic implementation of EnKF (DEnKF) with ensemble size equal to 20, and parameters tuned optimally as suggested in Sakov and Oke (2008). Covariance localization is applied via a Hadamard product (Houtekamer and Mitchell, 2001). The localization function is Gaspari–Cohn (Gaspari and Cohn, 1999) with a localization radius of 12 grid cells. The localization is carried out in the observation space by decorrelating both HB and HBHT, where B is the ensemble covariance matrix, and H is the linearized observation operator. In the present setup, the observation operator ℋ is linear, and thus H=ℋ.
Ensemble inflation is applied to the analysis ensemble of anomalies at the end of each assimilation cycle of DEnKF with an inflation factor of 1.06. The code snippet in Fig. 7 creates a DEnKF filtering object with these settings.

Most of the methods associated with the DEnKF object will raise exceptions if immediately invoked at this point. This is because several keys in the filter configuration dictionary, such as the observation, the forecast time, the analysis time, and the assimilation time, are not yet appropriately assigned. DATeS allows creating assimilation objects without these options to maximize flexibility. A convenient approach is to create an assimilation process object that, among other tasks, can properly update the filter configurations between consecutive assimilation cycles.

4.4 Step4: create an assimilation process
We now test DEnKF with the QG model by repeating the assimilation cycle over a
time span from 0 to 1250 with offsets of 12.5 time units between each
two consecutive observation/assimilation times. An initial ensemble is created
by the numerical model object. An experimental time span is set for
observations and assimilation. Here, the assimilation time instances
da_checkpoints are the same as the observation time instances
obs_checkpoints, but they can in general be different, leading to
either synchronous or asynchronous assimilation settings. This is implemented
in the code snippet in Fig. 8.
Here, experiment is responsible for creating synthetic observations
at all time instances defined by obs_checkpoints (except the
initial time). To create synthetic observations, the truth at the initial time
(0 in this case) is obtained from the model and is passed to the filtering
process object experiment, which in turn propagates it forward in
time to assimilation time points.
Finally, the assimilation experiment is executed by running the code snippet in Fig. 9.
4.5 Experiment results
The filtering results are printed to screen and are saved to files at the end
of each assimilation cycle as instructed by the output_configs
dictionary of the object experiment. The output directory structure
is controlled via the options in the output configuration dictionary
output_configs of the FilteringProcess object, i.e.,
experiment. All results are saved in appropriate subdirectories
under a main folder named Results in the root directory of DATeS. We
will refer to this directory henceforth as DATeS results directory. The
default behavior of a FilteringProcess object is to create a folder
named Filtering_Results in the DATeS results directory and to instruct
the filter object to save/output the results every
file_output_iter whenever the flag file_output is turned
on. Specifically, the DEnKF object creates three directories named
Filter_Statistics, Model_States_Repository, and
Observations_Repository, respectively. The root mean square (rms)
forecast and analysis errors are evaluated at each assimilation cycle and
are written to a file under the Filter_Statistics directory. The output
configurations of the filter object of the DEnKF class, i.e.,
denkf_filter, instruct the filter to save all ensemble members
(both forecast and analysis) to files by setting the value of the option
file_output_moment_only to False. The true solution
(reference state), the analysis ensemble, and the forecast ensembles are all
saved under the directory Model_States_Repository, while the
observations are saved under the directory Observations_Repository.
We note that, while here we illustrate the default behavior, the output
directories are fully configurable.
Figure 10 shows the reference initial state of the QG model, an example of the observational grid used, and an initial forecast state. The initial forecast state in Fig. 10 is the average of an initial ensemble collected from a long run of the QG model.
The true field, the forecast errors, and the DEnKF analyses errors at different time instances are shown in Fig. 11.
Typical solution quality metrics in the ensemble-based DA literature include RMSE plots and rank (Talagrand) histograms (Anderson, 1996; Candille and Talagrand, 2005).
Upon termination of a DATeS run, executable files can be cleaned up by
calling the function clean_executable_files( ) available in the
utility module (see the code snippet in Fig. 12).

Figure 10The QG-1.5 model. The truth (reference state) at the initial time (t=0) of the assimilation experiment is shown in panel (a). The red dots indicate the locations of observations for one of the test cases employed. The initial forecast state, taken as the average of the initial ensemble at time t=0, is shown in panel (b).
4.6 DATeS for benchmarking
4.6.1 Performance metrics
In the linear settings, the performance of an ensemble-based DA filter could be judged based on two factors. Firstly, convergence is explained by its ability to track the truth and secondly by the quality of the flow-dependent covariance matrix generated given the analysis ensemble.
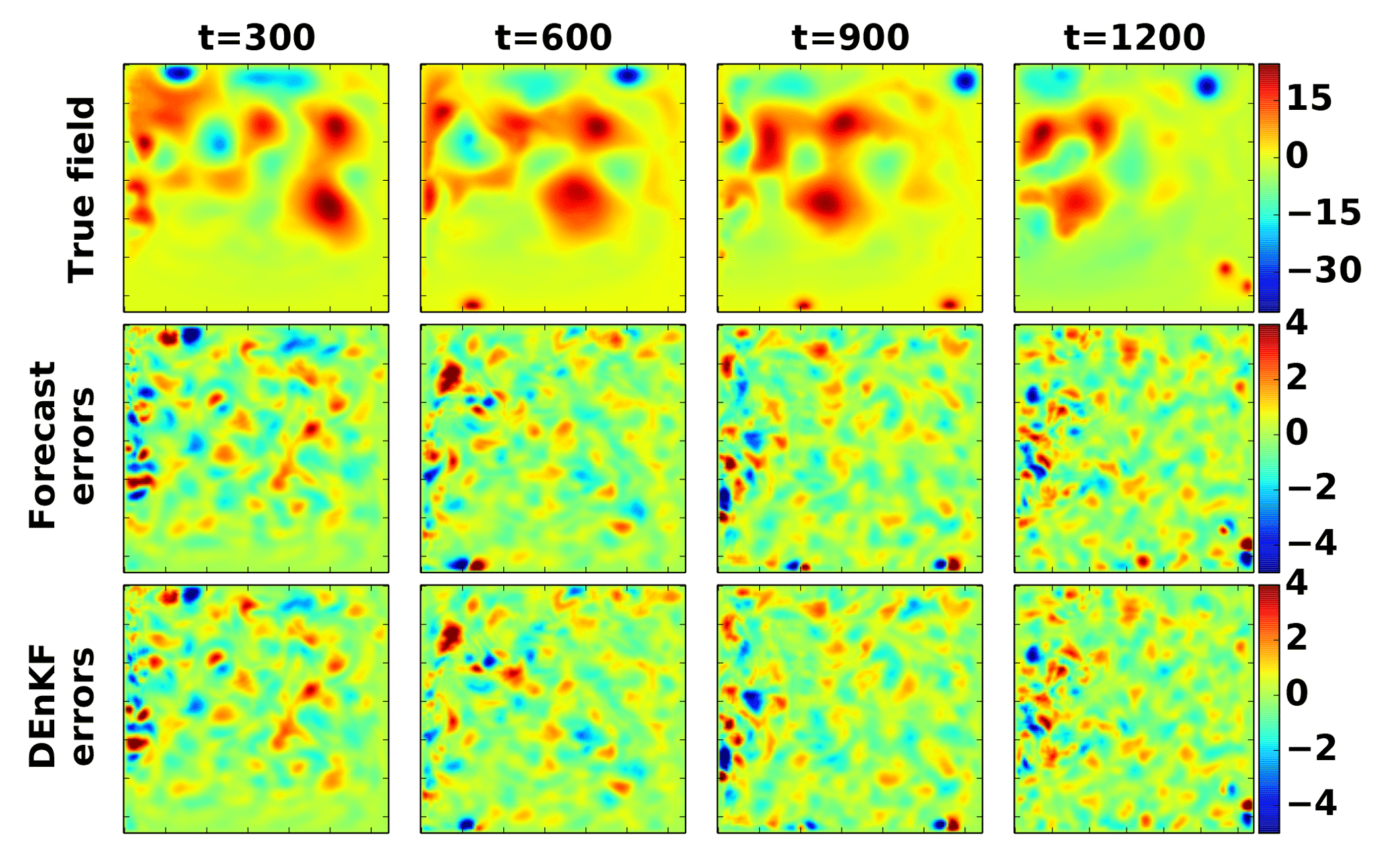
Figure 11Data assimilation results. The reference field ψ, the forecast errors, and the analysis errors at t=300, t=600, t=900, and t=1200 (time units) are shown. Here, the forecast error is defined as the reference field minus the average of the forecast ensemble, and the analysis error is the reference field minus the average of the analysis ensemble.

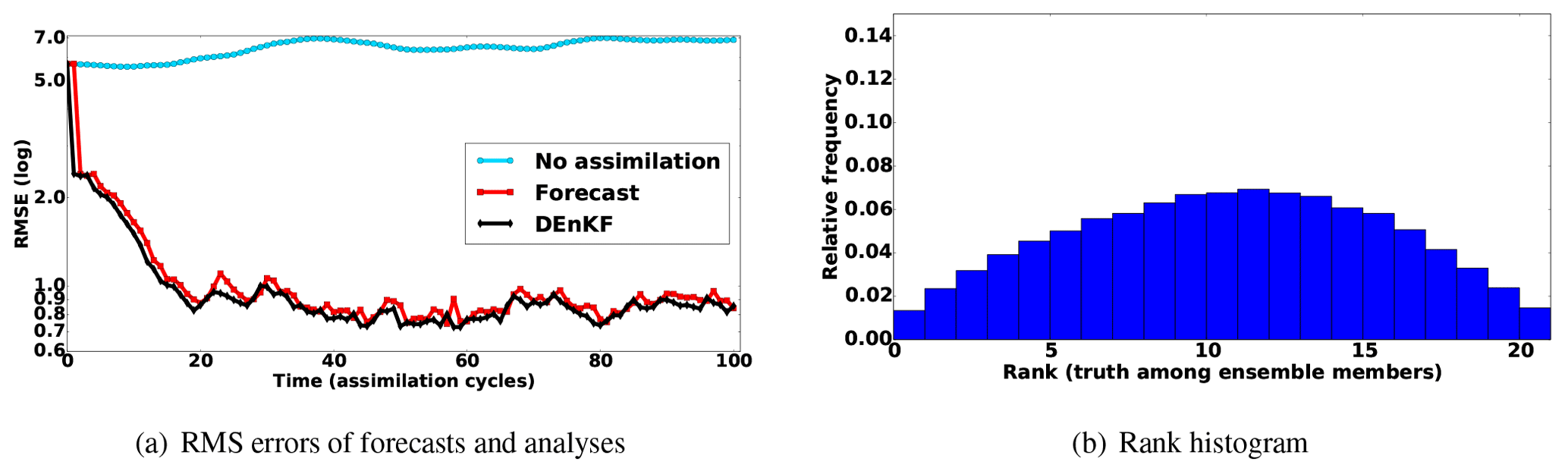
Figure 13Data assimilation results. In panel (a), “no assimilation” refers to the RMSE of the initial forecast (the average of the initial forecast ensemble) propagated forward in time over the 100 cycles without assimilating observations into it. The rank histogram of where the truth ranks among analysis ensemble members is shown in panel (b). The ranks are evaluated for every 13th variable in the state vector (past the correlation bound) after 100 assimilation cycles.
The convergence of the filter is monitored by inspecting the RMSE, which represents an ensemble-based standard deviation of the difference between reality, or truth, and the model-based prediction. In synthetic experiments, where the model representation of the truth is known, the RMSE reads
where is the prediction at a given time instant, e.g., the forecast ensemble mean, and is the verification, e.g., the true model state at the same time instant. For real applications, the states are generally replaced with observations. The rank (Talagrand) histogram (Anderson, 1996; Candille and Talagrand, 2005) could be used to assess the spread of the ensemble and its coverage to the truth. Generally speaking, the rank histogram plots the rank of the truth (or observations) compared to the ensemble members (or equivalent observations), ordered increasingly in magnitude. A nearly uniform rank histogram is desirable and suggests that the truth is indistinguishable from the ensemble members. A mound rank histogram indicates an overdispersed ensemble, a while U-shaped histogram indicates underdispersion. However, mound rank histograms are rarely seen in practice, especially for large-scale problems. See, e.g., Hamill (2001) for a mathematical description and a detailed discussion on the usefulness and interpretation of rank histograms.
Figure 13a shows an RMSE plot of the results of the experiment presented in Sect. 4.5. The histogram of the rank statistics of the truth, compared to the analysis ensemble, is shown in Fig. 13b.
For benchmarking, one needs to generate scalar representations of the RMSE and the uniformity of a rank histogram of a numerical experiment. The average RMSE can be used to compare the accuracy of a group of filters. To generate a scalar representation of the uniformity of a rank histogram, we fit a beta distribution to the rank histogram, scaled to the interval [0,1], and evaluate the Kullback–Leibler (KL) divergence (Kullback and Leibler, 1951) between the fitted distribution and a uniform distribution. The KL divergence between two beta distributions Beta(α,β), and is , where is the digamma function, i.e., the logarithmic derivative of the gamma function. Here, we set to a uniform distribution by setting . We consider a small, e.g., closer to 0, KL distance to be an indication of a nearly uniform rank histogram and consequently an indication of a well-dispersed ensemble. An alternative measure of rank histogram uniformity is to average the absolute distances of bins' heights from a uniformly distributed rank histogram (Bessac et al., 2018). DATeS provides several utility functions to calculate such metrics for a numerical experiment.
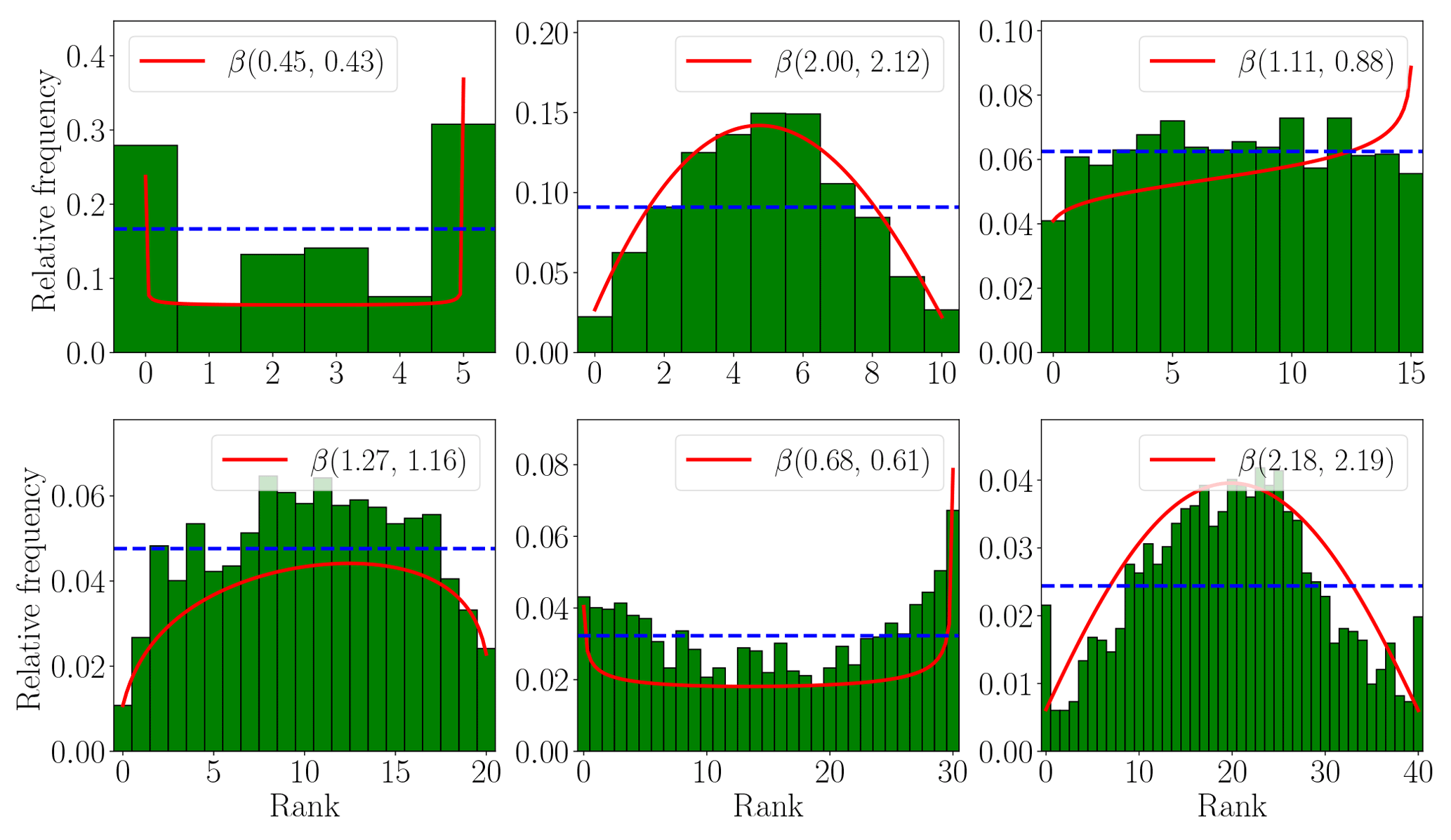
Figure 14Rank histograms with fitted beta distributions. The KL-divergence measure is indicated under each panel.
Table 5Measures of uniformity of the rank histograms shown in Fig. 14.

Figure 14 shows several rank histograms, along with uniform distribution, and fitted beta distributions. The KL-divergence measure is indicated under each panel. Results in Fig. 14 suggest that the fitted beta distribution parameters give, in most cases, a good scalar description of the shape of the histogram. Moreover, one can infer the shape of the rank histogram from the parameters of the fitted beta distribution. For example, if α>1 and β>1, the histogram has a mound shape, and is U-shaped if α<1 and β<1. The histogram is closer to uniformity as the parameters α, β both approach 1. Table 5 shows both KL distance between fitted beta distribution with respect to a uniform one, and the average distances between histogram bins and a uniform one.
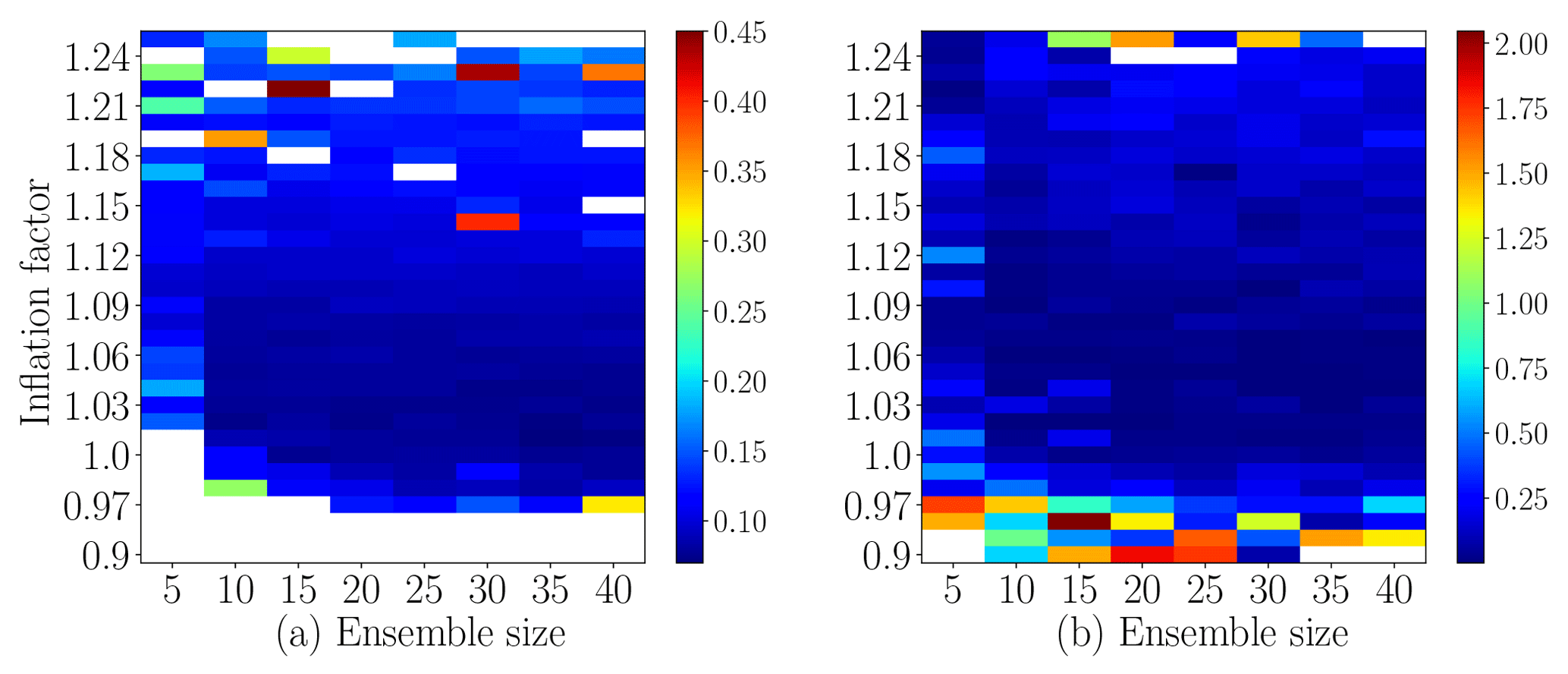
Figure 15Data assimilation results with DEnKF applied to Lorenz-96 system. RMSE results on a log scale are shown in panel (a). The KL distances between the analysis rank histogram and a uniform rank histogram are shown in panel (b). The localization radius is fixed to 4.
4.6.2 Benchmarking
The architecture of DATeS makes it easy to generate benchmarks for a new experiment. For example, one can write short scripts to iterate over a combination of settings of a filter to find the best possible results. As an example, consider the standard 40-variable Lorenz-96 model (Lorenz, 1996) described by the equations
where is the state vector, with periodic boundaries, i.e., x0≡x40, and the forcing parameter is set to F=8. These settings make the system chaotic (Lorenz and Emanuel, 1998) and are widely used in synthetic settings for geoscientific applications. Adjusting the inflation factor and the localization radius for EnKF filter is crucial. Consider the case where one is testing an adaptive inflation scheme and would like to decide on the ensemble size and the benchmark inflation factor to be used. As an example of benchmarking, we run the following experiment over a time interval [0,30] (units), where Eq. (11) is integrated forward in time using a fourth-order Runge–Kutta scheme with model step size 0.005 (units). Assume that synthetic observations are generated every 20 model steps, where every other entry of the model state is observed. We test the DEnKF algorithm, with the fifth-order piecewise-rational function of Gaspari and Cohn (Gaspari and Cohn, 1999) for covariance localization. The localization radius is held constant and is set to l=4, while the inflation factor is varied for each experiment. The experiments are repeated for ensemble sizes . We report the results over the last two-thirds of the experiments' time span, i.e., over the interval [10,30], to avoid spinup artifacts. This interval, consisting of the last 200 assimilation cycles out of 300, will be referred to as the “testing time span”. Any experiment that results in an average RMSE of more than 0.65 over the testing time span is discarded, and the filter used is seen to diverge. The numerical results are summarized in Figs. 15 and 16.
Figure 15 shows the average RMSE results and the KL distances between a beta distribution fitted to the analysis rank histogram of each experiment, and a uniform distribution. These plots give a preliminary idea of the plausible regimes of both ensemble size and inflation factor that should be used to achieve the best performance of the filter used under the current experimental settings. For example, for an ensemble size Nens=20, the inflation factor should be set approximately to 1.01–1.07 to give both a small RMSE and an analysis rank histogram close to uniform.
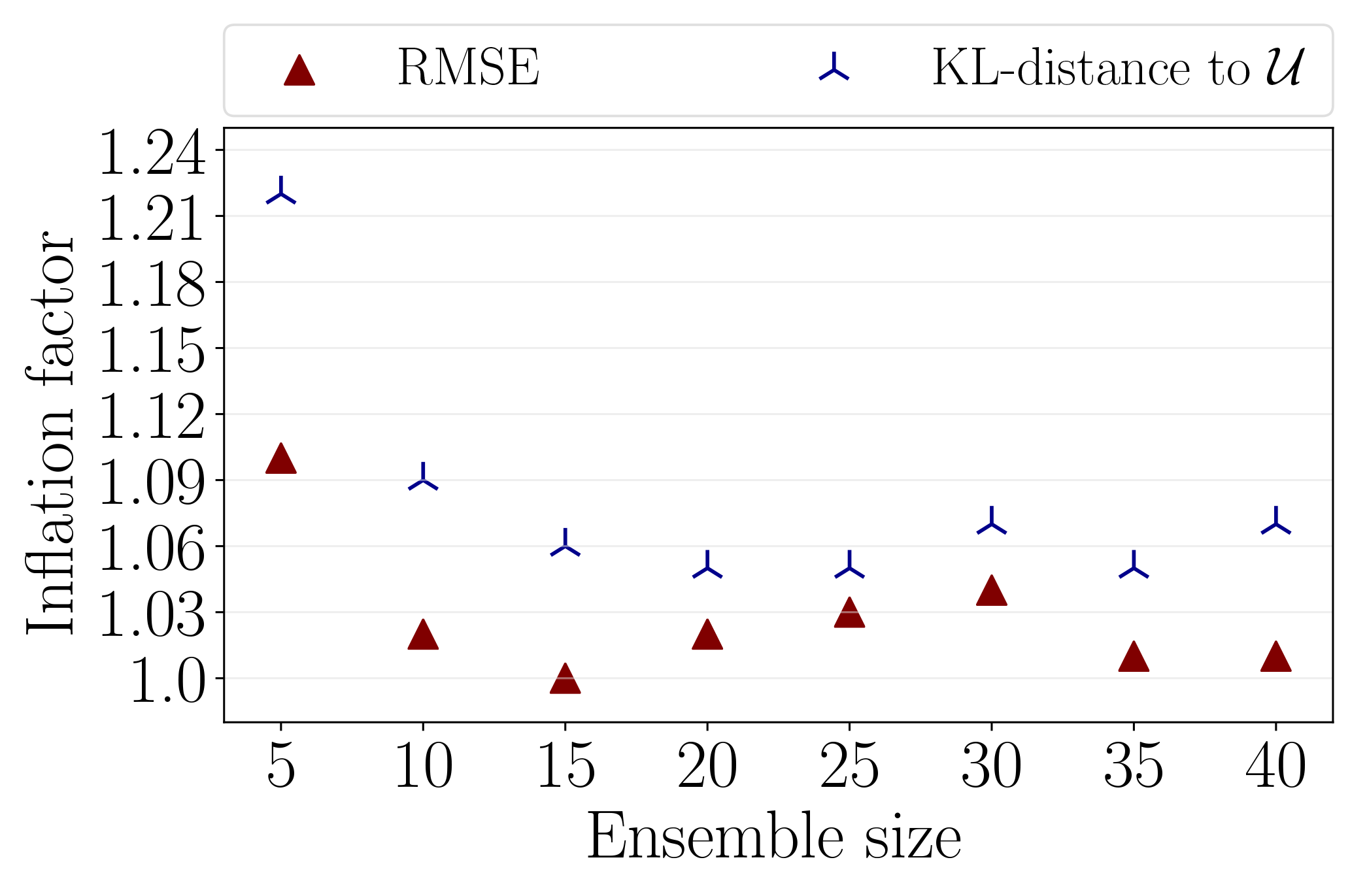
Figure 16Data assimilation results with DEnKF applied to Lorenz-96 system. The minimum average RMSE over the interval [10,30] is indicated by red triangles. The minimum average KL distance between the analysis rank histogram and a uniformly distributed rank histogram [10,30] is indicated by blue tripods. We show the results for every choice of the ensemble size. The localization radius is fixed to 4.
Concluding the best inflation factor for a given ensemble size, based on Fig. 15, however, could be tricky. Figure 16 shows the inflation factors resulting in minimum average RMSE and minimum KL distance to uniformity. Specifically, for each ensemble size, a red triangle refers to the experiment that resulted in minimum average RMSE over the testing time span, out of all benchmarking experiments carried out with this ensemble size. Similarly, the experiment that yielded minimum KL divergence to a uniform rank histogram is indicated by a blue tripod.
To answer the question about the ensemble size, we pick the ensemble size Nens=25, given the current experimental setup. The reason is that Nens=25 is the smallest ensemble size that yields small RMSE and is a well-dispersed ensemble as explained by Fig. 16. As for the benchmark inflation factor, the results in Fig. 16 show that for an ensemble size Nens=25, the best choice of an inflation factor is approximately 1.03–1.05 for Gaspari–Cohn localization with a fixed radius of 4.
Despite being a relatively easy process, unfortunately, generating a set of benchmarks for all possible combinations of numerical experiments is a time-consuming process and is better carried out by the DA community. Some example scripts for generating and plotting benchmarking results are included in the package for guidance.
Note that, when the Gaussian assumption is severely violated, standard benchmarking tools, such as RMSE and rank histograms, should be replaced with, or at least supported by, tools capable of assessing ensemble coverage of the posterior distribution. In such cases, MCMC methods, including those implemented in DATeS (Attia and Sandu, 2015; Attia et al., 2018; Attia, 2016), could be used as a benchmarking tool (Law and Stuart, 2012).
DATeS aims at being a collaborative environment and is designed such that adding DA components to the package is as easy and flexible as possible. This section describes how new implementations of components such as numerical models and assimilation methodologies can be added to DATeS.
The most direct approach is to write the new implementation completely in Python. This, however, may sacrifice efficiency or may not be feasible when existing code in other languages needs to be reused. One of the main characteristics of DATeS is the possibility of incorporating code written in low-level languages. There are several strategies that can be followed to interface existing C or Fortran code with DATeS. Amongst the most popular tools are SWIG and F2Py for interfacing Python code with existing implementations written in C and Fortran, respectively.
Whether the new contribution is written in Python, in C, or in Fortran, an appropriate Python class that inherits the corresponding base class, or a class derived from it, has to be created. The goal is to design new classes that are conformable with the existing structure of DATeS and can interact appropriately with new as well as existing components.
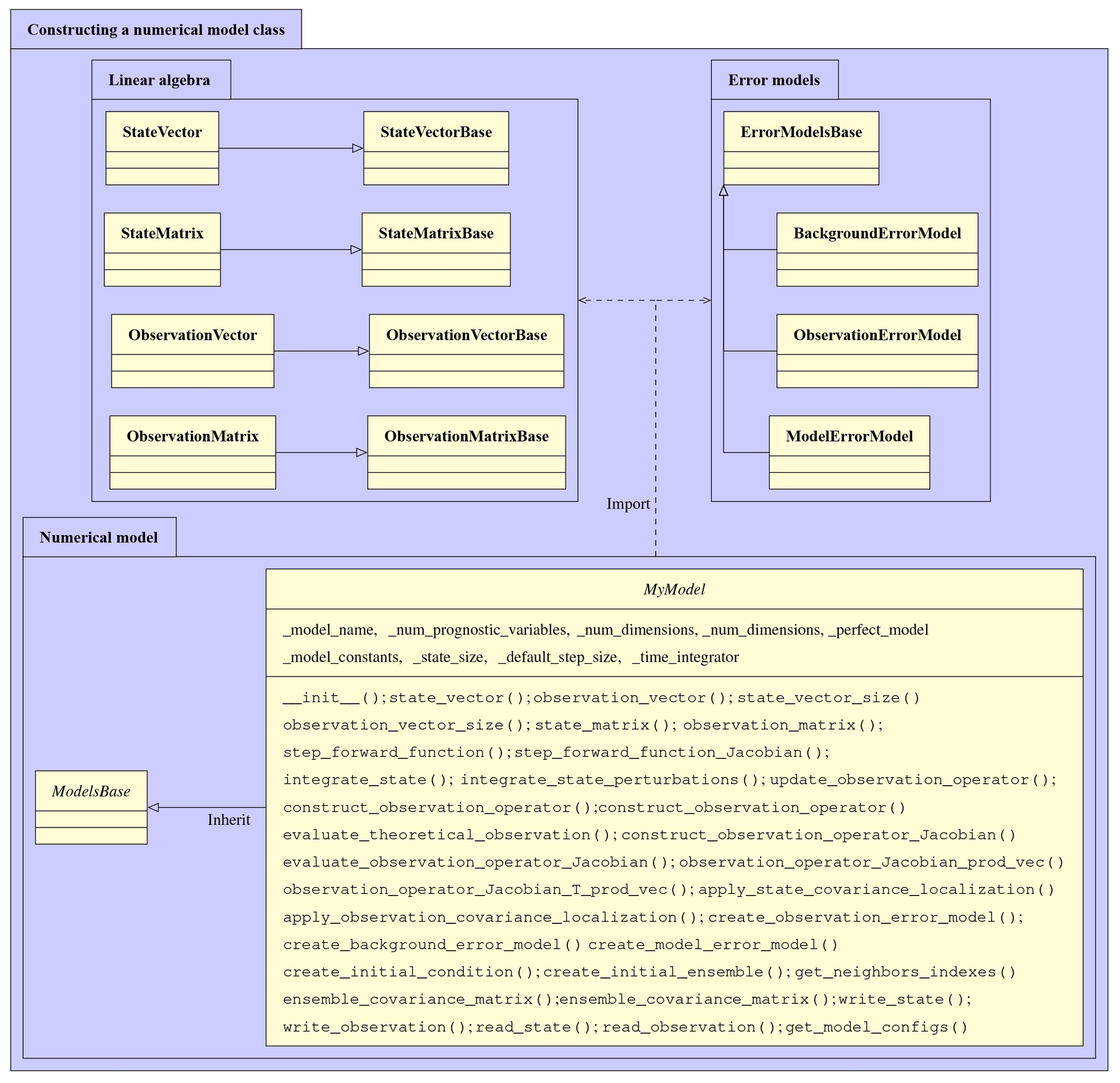
Figure 17Illustration of a numerical model class named MyModel and
relations to the linear algebra and error models classes. A dashed arrow
refers to an “import” relation, and a solid arrow represents an
“inherit” relation.
5.1 Adding a numerical model class
A new model class has to be created as a subclass of ModelsBase or
a class derived from it. The base class ModelsBase, similar to all
base classes in DATeS, contains headers of all the functions that need to be
provided by a model class to guarantee that it interacts properly with other
components in DATeS.

Figure 18The leading lines of an implementation of a class for the model
MyModel derived from the models' base class ModelsBase.
Linear algebra objects are derived from NumPy-based (or SciPy-based)
objects.
The first step is to grant the model object access to linear algebra data structures and to error models. Appropriate classes should be imported in a numerical model class:
-
Linear algebra includes state vector, state matrix, observation vector, and observation matrix.
-
Error models include background, model, and observation error models.
This gives the model object access to model-based data structures and error
entities necessary for DA applications.
Figure 17 illustrates a class of a numerical model
named MyModel, along with all the essential classes imported by it.
The next step is to create Python-based implementations for the model
functionalities. As shown in Fig. 17, the
corresponding methods have descriptive names in order to ease the use of
DATeS functionality. For example, the method state_vector( )
creates (or initializes) a state vector data structure. Details of each of
the methods in Fig. 17 are given in the DATeS user
manual (Attia et al., 2016).
As an example, suppose we want to create a model class name MyModel
using NumPy and SciPy (for sparse matrices) linear algebra data structures.
The code snippet in Fig. 18 shows the implementation
of such a class.
Note that in order to guarantee extensibility of the package we have to fix the naming of the methods associated with linear algebra classes, and even if only binary files are provided, the Python-based linear algebra methods must be implemented. If the model functionality is fully written in Python, the implementation of the methods associated with a model class is straightforward, as illustrated in Attia et al. (2016). On the other hand, if a low-level implementation of a numerical model is given, these methods wrap the corresponding low-level implementation.
5.2 Adding an assimilation class
The process of adding a new class for an assimilation methodology is similar to creating a class for a numerical model; however, it is expected to require less effort. For example, a class implementation of a filtering algorithm uses components and tools provided by the passed model and by the encapsulated linear algebra data structures and methods. Moreover, filtering algorithms belonging to the same family, such as different flavors of the well-known EnKF, are expected to share a considerable amount of infrastructure. Python inheritance enables the reuse of methods and variables from parent classes.
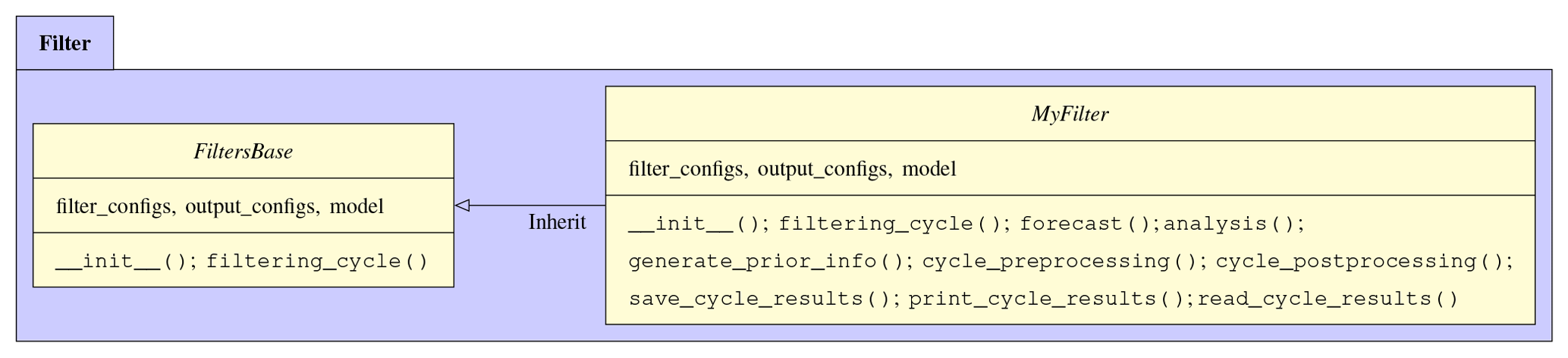
Figure 19Illustration of a DA filtering class MyFilter and its
relation to the filtering base class. A solid arrow represents an
“inherit” relation.
To create a new class for DA filtering, one derives it from the base class
FiltersBase, imports appropriate routines, and defines the necessary
functionalities. Note that each assimilation object has access to a model
object and consequently to the proper linear algebra data structures and
associated functionalities through that model.
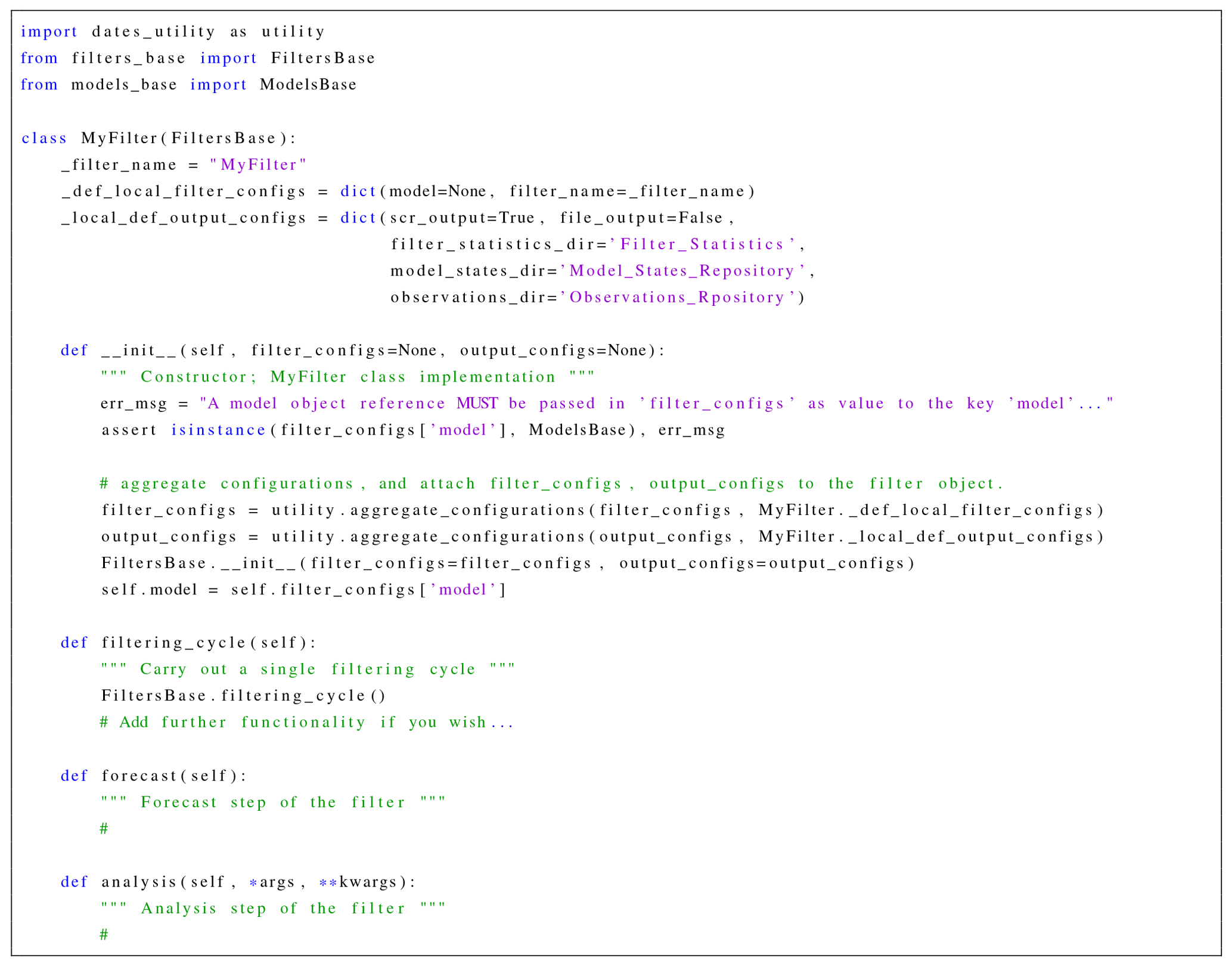
Figure 20The leading lines of an implementation of a DA filter; the
MyFilter class is derived from the filters' base class
FiltersBase.
Unlike the base class for numerical models (ModelsBase), the
filtering base class FiltersBase includes actual implementations of
several widely used solvers. For example, an implementation of the method
FiltersBase.filtering_cycle( ) is provided to carry out a single
filtering cycle by applying a forecast phase followed by an analysis phase
(or vice versa, depending on stated configurations).
Figure 19 illustrates a filtering class named
MyFilter that works by carrying out analysis and forecast steps in
the ensemble-based statistical framework.
The code snippet in Fig. 20 shows the leading lines
of an implementation of the MyFilter class.
This work describes DATeS, a flexible and highly extensible package for solving data assimilation problems. DATeS seeks to provide a unified testing suite for data assimilation applications that allows researchers to easily compare different methodologies in different settings with minimal coding effort. The core of DATeS is written in Python. The main functionalities, such as model propagation, filtering, and smoothing code, can however be written in high-performance languages such as C or Fortran to attain high levels of computational efficiency.
While we introduced several assimilation schemes in this paper, the current version, DATeS v1.0, emphasizes the statistical assimilation methods. DATeS provide the essential infrastructure required to combine elements of a variational assimilation algorithm with other parts of the package. The variational aspects of DATeS, however, require additional work that includes efficient evaluation of the adjoint model, checkpointing, and handling weak constraints. A new version of the package, under development, will carefully address these issues and will provide implementations of several variational schemes. The variational implementations will be derived from the 3D- and 4D-Var classes implemented in the current version (DATeS v1.0).
The current version of the package presented in this work, DATeS v1.0, can be situated between professional data assimilation packages such as DART and simplistic research-grade implementations. DATeS is well suited for educational purposes as a learning tool for students and newcomers to the data assimilation research field. It can also help data assimilation researchers develop specific components of the data assimilation process and easily use them with the existing elements of the package. For example, one can develop a new filter and interface an existing physical model, and error models, without the need to understand how these components are implemented. This requires unifying the interfaces between the different components of the data assimilation process, which is an essential feature of DATeS. These features allow for optimal collaboration between teams working on different aspects of a data assimilation system.
To contribute to DATeS, by adding new implementations, one must comply with the naming conventions given in the base classes. This requires building proper Python interfaces for the implementations intended to be incorporated with the package. Interfacing operational models, such the Weather Research and Forecasting (WRF) model (Skamarock et al., 2005), in the current version, DATeS v1.0, is expected to require substantial work. Moreover, DATeS does not yet support parallelization, which limits its applicability in operational settings.
The authors plan to continue developing DATeS with the long-term goal of making it a complete data assimilation testing suite that includes support for variational methods, as well as interfaces with complex models such as quasi-geostrophic global circulation models. Parallelization of DATeS, and interfacing large-scale models such as the WRF model, will also be considered in the future.
The code of DATeS v1.0 is available at https://doi.org/10.5281/zenodo.1323207 (Attia, 2018). The online documentation and alternative download links are available at http://people.cs.vt.edu/~attia/DATeS/index.html (last access:2 January 2019).
AA developed the package and performed the numerical simulations. The two authors wrote the paper, and AS supervised the whole project.
The authors declare that they have no conflict of interest.
The authors would like to thank Mahesh Narayanamurthi, Paul Tranquilli, Ross Glandon, and Arash Sarshar from the Computational Science Laboratory (CSL) at
Virginia Tech, and Vishwas Rao from the Argonne National Laboratory, for their
contributions to an initial version of DATeS. This work has been supported in
part by awards NSF CCF-1613905, NSF ACI–1709727, and AFOSR DDDAS 15RT1037, and
by the CSL at Virginia Tech.
Edited by: Ignacio Pisso
Reviewed by: Kody Law and three anonymous referees
Ades, M. and van Leeuwen, P. J.: The equivalent-weights particle filter in a high-dimensional system, Q. J. Roy. Meteor. Soc., 141, 484–503, 2015. a
Anderson, J. L.: A method for producing and evaluating probabilistic forecasts from ensemble model integrations, J. Climate, 9, 1518–1530, 1996. a, b
Anderson, J. L.: A local least squares framework for ensemble filtering, Mon. Weather Rev., 131, 634–642, 2003. a
Anderson, J. L., Hoar, T., Raeder, K., Liu, H., Collins, N., Torn, R., and Avellano, A.: The data assimilation research testbed: A community facility, B. Am. Meteorol. Soc., 90, 1283–1296, 2009. a
Asch, M., Bocquet, M., and Nodet, M.: Data assimilation: methods, algorithms, and applications, The Society for Industrial and Applied Mathematics (SIAM), Philadelphia, USA, vol. 11, ISBN 9781611974539, 2016. a
Attia, A.: Advanced Sampling Methods for Solving Large-Scale Inverse Problems, PhD thesis, Virginia Tech, available at: http://hdl.handle.net/10919/73683 (last access: 2 February 2019), 2016. a, b
Attia, A.: a-attia/DATeS: Initial version of DATeS (Version v1.0), Zenodo, https://doi.org/10.5281/zenodo.1323207, 2018. a
Attia, A. and Constantinescu, E.: An Optimal Experimental Design Framework for Adaptive Inflation and Covariance Localization for Ensemble Filters, arXiv preprint arXiv:1806.10655, under review, 2018. a, b, c
Attia, A. and Sandu, A.: A Hybrid Monte Carlo sampling filter for non-Gaussian data assimilation, AIMS Geosciences, 1, 41–78, https://doi.org/10.3934/geosci.2015.1.41, 2015. a, b, c
Attia, A., Rao, V., and Sandu, A.: A sampling approach for four dimensional data assimilation, in: Dynamic Data-Driven Environmental Systems Science, Springer, Cham, Switzerland, 215–226, 2015. a
Attia, A., Glandon, R., Tranquilli, P., Narayanamurthi, M., Sarshar, A., and Sandu, A.: DATeS: A Highly-Extensible Data Assimilation Testing Suite, available at: http://people.cs.vt.edu/~attia/DATeS (last access: 2 January 2019), 2016. a, b, c
Attia, A., Rao, V., and Sandu, A.: A Hybrid Monte Carlo sampling smoother for four dimensional data assimilation, Int. J. Numer. Meth. Fl., 83, 90–112, https://doi.org/10.1002/fld.4259, 2017a. a
Attia, A., Stefanescu, R., and Sandu, A.: The Reduced-Order Hybrid Monte Carlo Sampling Smoother, Int. J. Numer. Meth. Fl., 83, 28–51, https://doi.org/10.1002/fld.4255, 2017b. a
Attia, A., Moosavi, A., and Sandu, A.: Cluster Sampling Filters for Non-Gaussian Data Assimilation, Atmosphere, 9, 213, https://doi.org/10.3390/atmos9060213, 2018. a, b, c, d, e, f
Beazley, D. M.: SWIG: An Easy to Use Tool for Integrating Scripting Languages with C and C++, in: Proc. 4th USENIX Tcl/Tk Workshop, 10–13 July 1996 Monterey, California, USA, 129–139, 1996. a
Beskos, A., Crisan, D., Jasra, A., Kamatani, K., and Zhou, Y.: A stable particle filter for a class of high-dimensional state-space models, Adv. Appl. Probab., 49, 24–48, 2017. a
Bessac, J., Constantinescu, E., and Anitescu, M.: Stochastic simulation of predictive space–time scenarios of wind speed using observations and physical model outputs, Ann. Appl. Stat., 12, 432–458, https://doi.org/10.1214/17-AOAS1099, 2018. a
Bishop, C. H., Etherton, B. J., and Majumdar, S. J.: Adaptive sampling with the ensemble transform Kalman filter. Part I: Theoretical aspects, Mon. Weather Rev., 129, 420–436, 2001. a
Burgers, G., van Leeuwen, P. J., and Evensen, G.: Analysis scheme in the Ensemble Kalman Filter, Mon. Weather Rev., 126, 1719–1724, 1998. a, b
Candille, G. and Talagrand, O.: Evaluation of probabilistic prediction systems for a scalar variable, Q. J. Roy. Meteor. Soc., 131, 2131–2150, 2005. a, b
Daley, R.: Atmospheric data analysis, no. 2, Cambridge University Press, Cambridge, UK, 1993. a
Doucet, A., De Freitas, N., and Gordon, N.: An introduction to sequential Monte Carlo methods, in: Sequential Monte Carlo methods in practice, Springer, New York, NY, USA, 3–14, 2001. a
Evensen, G.: Sequential data assimilation with a nonlinear quasi-geostrophic model using Monte Carlo methods to forcast error statistics , J. Geophys. Res., 99, 10143–10162, 1994. a
Evensen, G.: The Ensemble Kalman Filter: theoretical formulation and practical implementation, Ocean Dynam., 53, 343–367, 2003. a
Evensen, G.: Data assimilation: the ensemble Kalman filter, Springer Science & Business Media, Springer, Dordrecht, Heidelberg, London, New York, 2009. a
Evensen, G. and Sakov, P.: Data assimilation, The Ensemble Kalman Filter; EnKF-Matlab Code, available at: http://enkf.nersc.no/Code (last access: 2 January 2019), 2009. a
Gaspari, G. and Cohn, S. E.: Construction of correlation functions in two and three dimensions, Q. J. Roy. Meteor. Soc., 125, 723–757, 1999. a, b
Gordon, N. J., Salmond, D. J., and Smith, A. F.: Novel approach to nonlinear/non-Gaussian Bayesian state estimation, in: IEE Proceedings F-Radar and Signal Processing, 140, 107–113, 1993. a, b
Gustafsson, B.: An alternating direction implicit method for solving the shallow water equations, J. Comput. Phys., 7, 239–254, 1971. a
Hamill, T. M.: Interpretation of rank histograms for verifying ensemble forecasts, Mon. Weather Rev., 129, 550–560, 2001. a
Hamill, T. M. and Whitaker, J. S.: Distance-dependent filtering of background error covariance estimates in an ensemble Kalman filter, Mon. Weather Rev., 129, 2776–2790, 2001. a
Houtekamer, P. L. and Mitchell, H. L.: Data assimilation using an ensemble Kalman filter technique, Mon. Weather Rev., 126, 796–811, 1998. a, b
Houtekamer, P. L. and Mitchell, H. L.: A sequential ensemble Kalman filter for atmospheric data assimilation, Mon. Weather Rev., 129, 123–137, 2001. a, b
Kalman, R. E.: A New Approach to Linear Filtering and Prediction Problems, J. Basic Eng.-T. ASME, 82, 35–45, 1960. a, b
Kalman, R. E. and Bucy, R. S.: New results in linear filtering and prediction theory, J. Basic Eng.-T. ASME, 83, 95–108, 1961. a, b
Kalnay, E.: Atmospheric modeling, data assimilation and predictability, Cambridge University Press, Cambridge, UK, 2003. a
Kitagawa, G.: Monte Carlo filter and smoother for non-Gaussian nonlinear state space models, J. Comput. Graph. Stat., 5, 1–25, 1996. a
Kullback, S. and Leibler, R. A.: On information and sufficiency, Ann. Math. Stat., 22, 79–86, 1951. a
Law, K. and Stuart, A. M.: Evaluating data assimilation algorithms, Mon. Weather Rev., 140, 3757–3782, 2012. a
Law, K., Stuart, A., and Zygalakis, K.: Data assimilation: a mathematical introduction, vol. 62, Springer International Publishing, Switzerland, 2015. a, b
Llopis, F. P., Kantas, N., Beskos, A., and Jasra, A.: Particle Filtering for Stochastic Navier–Stokes Signal Observed with Linear Additive Noise, SIAM J. Sci. Comput., 40, A1544–A1565, 2018. a
Lorenz, E. N.: Deterministic nonperiodic flow, J. Atmos. Sci., 20, 130–141, 1963. a
Lorenz, E. N.: Predictability: A problem partly solved, in: Proc. Seminar on Predictability, 4–8 September 1995, Shinfield Park, Reading, UK, vol. 1, 1996. a, b
Lorenz, E. N. and Emanuel, K. A.: Optimal sites for supplementary weather observations: Simulation with a small model, J. Atmos. Sci., 55, 399–414, 1998. a
Marelli, S. and Sudret, B.: UQLab: a framework for uncertainty quantification in MATLAB, in: Vulnerability, Uncertainty, and Risk: Quantification, Mitigation, and Management, American Society of Civil Engineers, Reston, VA, USA, Second International Conference on Vulnerability and Risk Analysis and Management (ICVRAM), 13–16 July 2014, Liverpool, UK, 2554–2563, 2014. a
Moosavi, A., Attia, A., and Sandu, A.: A Machine Learning Approach to Adaptive Covariance Localization, arXiv preprint arXiv:1801.00548, under review, 2018. a
Navon, I. M. and De-Villiers, R.: GUSTAF: A Quasi-Newton nonlinear ADI FORTRAN IV program for solving the shallow-water equations with augmented lagrangians, Comput. Geosci., 12, 151–173, 1986. a
Peterson, P.: F2PY: a tool for connecting Fortran and Python programs, Int. J. Comp. Sci. Eng., 4, 296–305, 2009. a
Poterjoy, J.: A localized particle filter for high-dimensional nonlinear systems, Mon. Weather Rev., 144, 59–76, 2016. a
Potthast, R., Walter, A. S., and Rhodin, A.: A Localised Adaptive Particle Filter within an Operational NWP Framework, Mon. Weather Rev., 147, 345–361, https://doi.org/10.1175/MWR-D-18-0028.1, 2018. a
Rebeschini, P. and Van Handel, R.: Can local particle filters beat the curse of dimensionality?, Ann. Appl. Probab., 25, 2809–2866, 2015. a
Sakov, P. and Oke, P. R.: A deterministic formulation of the ensemble Kalman filter: an alternative to ensemble square root filters, Tellus A, 60, 361–371, 2008. a, b, c, d, e, f
Sakov, P., Oliver, D. S., and Bertino, L.: An iterative EnKF for strongly nonlinear systems, Mon. Weather Rev., 140, 1988–2004, 2012. a
Skamarock, W. C., Klemp, J. B., Dudhia, J., Gill, D. O., Barker, D. M., Wang, W., and Powers, J. G.: A description of the advanced research WRF version 2, National Center for Atmospheric Research Boulder, Colorado, USA, Mesoscale and Microscale Meteorology Div, 2005. a
Smith, K. W.: Cluster ensemble Kalman filter, Tellus A, 59, 749–757, 2007. a
Tippett, M. K., Anderson, J. L., and Bishop, C. H.: Ensemble square root filters, Mon. Weather Rev., 131, 1485–1490, 2003. a
Van Leeuwen, P. J.: Particle filtering in geophysical systems, Mon. Weather Rev., 137, 4089–4114, 2009. a
Vetra-Carvalho, S., Van Leeuwen, P. J., Nerger, L., Barth, A., Altaf, M. U., Brasseur, P., Kirchgessner, P., and Beckers, J.-M.: State-of-the-art stochastic data assimilation methods for high-dimensional non-Gaussian problems, Tellus A, 70, 1445364, https://doi.org/10.1080/16000870.2018.1445364, 2018. a, b
Whitaker, J. S. and Hamill, T. M.: Ensemble data assimilation without perturbed observations, Mon. Weather Rev., 130, 1913–1924, 2002. a
Zhang, H. and Sandu, A.: FATODE: A Library for Forward, Adjoint, and Tangent Linear Integration of ODEs, SIAM J. Sci. Comput., 36, C504–C523, https://doi.org/10.1137/130912335, 2014. a
Zupanski, M.: Maximum likelihood ensemble filter: Theoretical aspects, Mon. Weather Rev., 133, 1710–1726, 2005. a
Zupanski, M., Navon, I. M., and Zupanski, D.: The Maximum Likelihood Ensemble Filter as a non-differentiable minimization algorithm, Q. J. Roy. Meteor. Soc., 134, 1039–1050, 2008. a