the Creative Commons Attribution 4.0 License.
the Creative Commons Attribution 4.0 License.
 | 13 Sep 2024
| 13 Sep 2024
GPU-HADVPPM4HIP V1.0: using the heterogeneous-compute interface for portability (HIP) to speed up the piecewise parabolic method in the CAMx (v6.10) air quality model on China's domestic GPU-like accelerator
Lingling Wang
Hengliang Guo
Nan Wang
Huaqiong Cheng
Xiao Tang
Dongxing Li
Lina Liu
Dongqing Li
Hao Wu
Lanning Wang
Graphics processing units (GPUs) are becoming a compelling acceleration strategy for geoscience numerical models due to their powerful computing performance. In this study, AMD's heterogeneous-compute interface for portability (HIP) was implemented to port the GPU acceleration version of the piecewise parabolic method (PPM) solver (GPU-HADVPPM) from NVIDIA GPUs to China's domestic GPU-like accelerators like GPU-HADVPPM4HIP. Further, it introduced the multi-level hybrid parallelism scheme to improve the total computational performance of the HIP version of the CAMx (Comprehensive Air Quality Model with Extensions; CAMx-HIP) model on China's domestic heterogeneous cluster. The experimental results show that the acceleration effect of GPU-HADVPPM on the different GPU accelerators is more apparent when the computing scale is more extensive, and the maximum speedup of GPU-HADVPPM on the domestic GPU-like accelerator is 28.9×faster. The hybrid parallelism with a message passing interface (MPI) and HIP enables achieving up to a 17.2× speedup when configuring 32 CPU cores and GPU-like accelerators on the domestic heterogeneous cluster. The OpenMP technology is introduced further to reduce the computation time of the CAMx-HIP model by 1.9×. More importantly, by comparing the simulation results of GPU-HADVPPM on NVIDIA GPUs and domestic GPU-like accelerators, it is found that the simulation results of GPU-HADVPPM on domestic GPU-like accelerators have less difference than the NVIDIA GPUs. Furthermore, we also show that the data transfer efficiency between CPU and GPU has a meaningful essential impact on heterogeneous computing and point out that optimizing the data transfer efficiency between CPU and GPU is one of the critical directions to improve the computing efficiency of geoscience numerical models in heterogeneous clusters in the future.
- Article
(3583 KB) - Full-text XML
-
Supplement
(1809 KB) - BibTeX
- EndNote





Over recent years, graphics processing units (GPUs) have become a necessary part of providing processing power for high-performance computing (HPC) applications, and heterogeneous supercomputing based on CPU processors and GPU accelerators has become the trend of global advanced supercomputing development. The 61st edition of the top 10 list, released in June 2023, reveals that 80 % of advanced supercomputers adopt heterogeneous architectures (Top500, 2023). The Frontier system equipped with an AMD Instinct MI250X GPU at the Oak Ridge National Laboratory remains the only actual exascale machine with the high-performance LINPACK benchmark (HPL) score of 1.194 exaflop s−1 (News, 2023). How to realize large-scale parallel computing and improve the computational performance of geoscience numerical models on the GPU has become one of the significant directions for the future development of numerical models.
Regarding the heterogeneous porting for air quality models, most scholars select the chemical module, one of the hotspots, to implement heterogeneous porting and porting the computational process initially on the CPU processes to the GPU accelerator to improve the computing efficiency. For example, Sun et al. (2018) used compute unified device architecture (CUDA) technology to port the second-order Rosenbrock solver of the chemistry module CAM4-Chem to an NVIDIA Tesla K20X GPU. They achieved up to 11.7× speedup compared to the AMD Opteron™ 6274 CPU (16 cores) using one CPU core. Alvanos and Christoudias (2017) developed software that automatically generates CUDA kernels to solve chemical kinetics equations in the chemistry module for the global climate model ECHAM/MESSy Atmospheric Chemistry (EMAC), and performance evaluation shows a 20.4× speedup for the kernel execution. Linford et al. (2011) presented the Kinetic PreProcessor (KPP) to generate the chemical mechanism code in CUDA language, which can be implemented on the NVIDIA Tesla C1060 GPU. The KPP-generated SAPRC'99 mechanism from the Community Multiscale Air Quality (CMAQ) model achieved a maximum speedup of 13.7×, and the KPP-generated RADM2 mechanism from the WRF-Chem (Weather Research and Forecasting coupled with Chemistry) model achieved an 8.5× speedup compared to the Intel Quad-Core Xeon 5400 series CPU. Similarly, the advection module is also one of the hotspot modules in the air quality model. Cao et al. (2023a) adopted the Fortran–C–CUDA C scheme and implemented a series of optimizations, including reducing the CPU–GPU communication frequency and optimizing the GPU memory access and thread and block co-indexing, to increase the computational efficiency of the piecewise parabolic method (PPM) horizontal advection scheme (HADVPPM) solver. It can achieve an up to 18.8× speedup on the NVIDIA Tesla V100 GPU compared to the Intel Xeon Platinum 8168 CPU.
The CUDA technology was implemented to carry out heterogeneous porting for the atmospheric chemical models from the CPU processors to different NVIDIA GPU accelerators. In this study, the heterogeneous-compute interface for portability (HIP) interface was introduced to implement the porting of GPU-HADVPPM (GPU acceleration version of HADVPPM) from the NVIDIA GPU to China's domestic GPU-like accelerators based on the research of Cao et al. (2023a). The domestic GPU-like accelerator plays the same role as the NVIDIA GPU, which is also used to accelerate the advection module in the Comprehensive Air Quality Model with Extensions (CAMx) model, so we refer to it as a GPU-like accelerator. First, we compared the simulation results of the Fortran version of the CAMx model with the CAMx-CUDA and CAMx-HIP models, which were coupled with the CUDA and HIP versions of the GPU-HADVPPM program, respectively. Then, the computing performance of GPU-HADVPPM programs on different GPUs was compared. Finally, we tested the total performance of the CAMx-HIP model with multi-level hybrid parallelization on China's domestic heterogeneous cluster.
2.1 The CAMx model description and configuration
The Comprehensive Air Quality Model with Extensions version 6.10 (CAMx v6.10; ENVIRON, 2014) is a state-of-the-art air quality model that simulates the emission, dispersion, chemical reaction, and removal of the air pollutants on a system of nested three-dimensional grid boxes (CAMx, 2023). The Eulerian continuity equation is expressed as shown by Cao et al. (2023a): the first term on the right-hand side represents horizontal advection, the second term represents net resolved vertical transport across an arbitrary space and time-varying height grid, and the third term represents turbulent diffusion on the sub-grid scale. Pollutant emission represents both point-source emissions and gridded-source emissions. Chemistry is treated by solving a set of reaction equations defined by specific chemical mechanisms. Pollutant removal includes both dry deposition and wet scavenging by precipitation.
In terms of the horizontal advection term on the right-hand side, this equation is solved using either the Bott (1989) scheme or the PPM (Colella and Woodward, 1984; Odman and Ingram, 1996) scheme. The PPM horizontal advection scheme (HADVPPM) was selected in this study because it provides higher accuracy with minimal numerical diffusion (ENVIRON, 2014). The other numerical schemes selected during the CAMx model testing are listed in Table S1 in the Supplement. As described by Cao et al. (2023a), the -fp-model precise compile flag, which can force the compiler to use the vectorization of some computation under value safety, is 41.4 % faster than the -mieee-fp compile flag, which comes from the Makefile of the official CAMx version with the absolute errors of the simulation results being less than ± 0.05 ppbV (parts per billion volume). Therefore, the -fp-model precise compile flag was selected when compiling the CAMx model in this research.
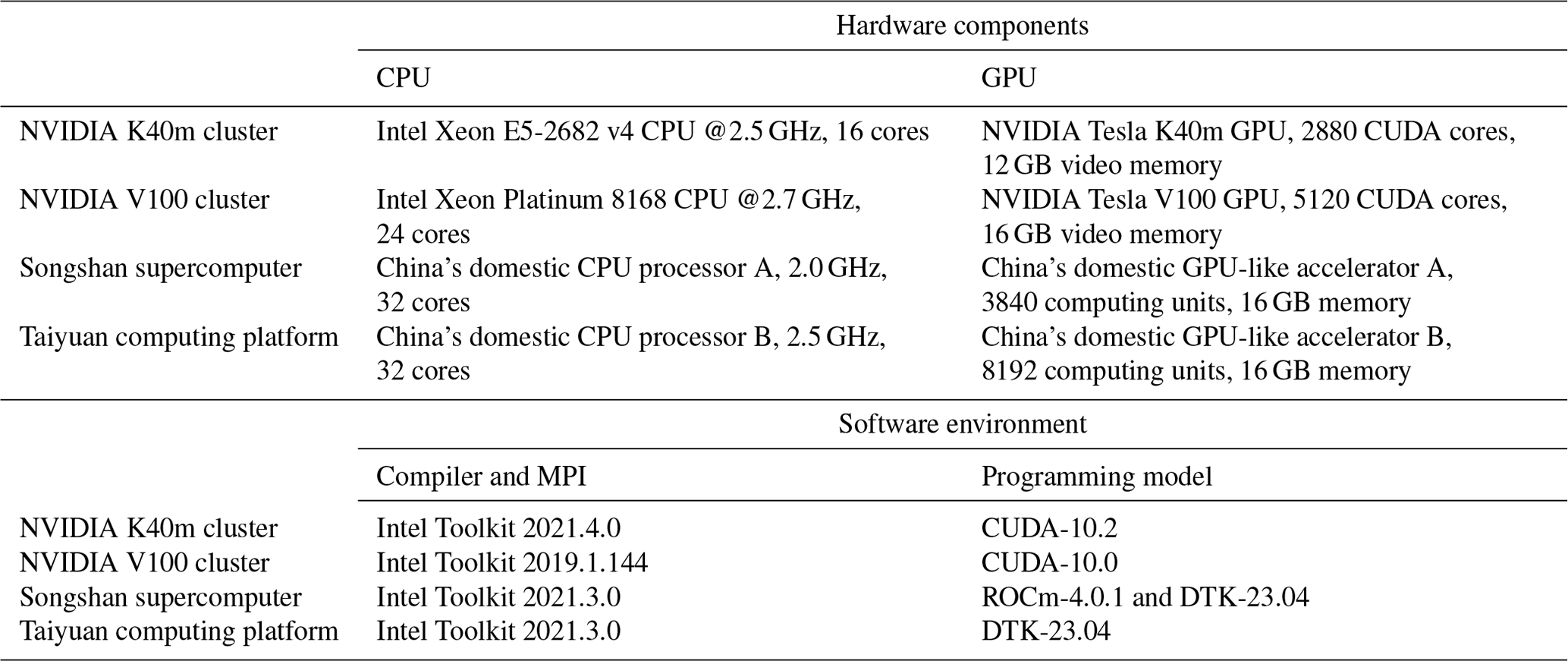
Table 1Configurations of the NVIDIA K40m cluster, NVIDIA V100 cluster, Songshan supercomputer, and Taiyuan computing platform.
2.2 CUDA and ROCm introduction
Compute Unified Device Architecture (CUDA; NVIDIA, 2020) is a parallel programming paradigm released in 2007 by NVIDIA. CUDA is a proprietary application programming interface (API) and is only supported on NVIDIA GPUs. CUDA programming uses a programming language similar to standard C, which achieves efficient parallel computing of programs on NVIDIA GPUs by adding some keywords. The previous study implemented CUDA technology to port the HADVPPM program from the CPU to an NVIDIA GPU (Cao et al., 2023a).
Radeon Open Compute platform (ROCm; AMD, 2023) is an open-source software platform developed by AMD for HPC and hyperscale GPU computing. The ROCm for the AMD GPU is generally equivalent to CUDA for the NVIDIA GPU. The ROCm software platform uses AMD's HIP interface, a C runtime API allowing developers to run programs on AMD GPUs. In general, they are very similar, and their code can be converted directly by replacing the string “cuda” with “hip” in most cases. More information about the HIP API is available on the AMD ROCm website (ROCm, 2023). Similar to AMD GPU, developers can also use the ROCm-HIP programming interface to implement programs running on China's domestic GPU-like accelerator. The CUDA code cannot run directly on domestic GPU-like accelerators and must be transcoded into HIP code.
2.3 Hardware components and software environment of the testing system
Table 1 lists four GPU clusters where we conducted the experiments: two NVIDIA heterogeneous clusters that have the same hardware configuration as Cao et al. (2023a) and two of China's domestic heterogeneous clusters newly used in this research, namely the “Songshan” supercomputer and “Taiyuan” computing platform. Two NVIDIA heterogeneous clusters are equipped with NVIDIA Tesla K40m and V100 GPU accelerators. Both domestic clusters include thousands of computing nodes and each contain one of China's domestic CPU processors, four of China's domestic GPU-like accelerators, and 128 GB of DDR4 2666 memory. The domestic CPU has four non-uniform memory access (NUMA) nodes, and each NUMA node has eight X86-based processors. The accelerator adopts a GPU-like architecture consisting of a 16 GB HBM2 device memory and many compute units. The GPU-like accelerators are connected to the CPU with peripheral component interconnect express (PCIe), and the peak bandwidth of the data transfer between main memory and device memory is 16 GB s−1.
It is worth noting that the Taiyuan computing platform has been updated in three main aspects compared to the Songshan supercomputer. The CPU clock speed has been increased from 2.0 to 2.5 GHz, the number of GPU-like computing units has been increased from 3840 to 8192, and the peak bandwidth between main memory and video memory has been increased from 16 to 32 GB s−1. Regarding the software environment, the NVIDIA GPU is programmed using the CUDA toolkit, and the domestic GPU-like accelerator is programmed using the ROCm-HIP toolkit developed by AMD (ROCm, 2023). More details about the hardware composition and software environment of the four heterogeneous clusters are presented in Table 1.
This section mainly introduces the strategy of porting the HADVPPM program from the CPU to the NVIDIA GPU and domestic GPU-like accelerator, as well as the proposed multi-level hybrid parallelism technology to make full use of computing resources.
3.1 Porting the HADVPPM program from the CPU to the NVIDIA GPU and domestic GPU-like accelerator
Figure 1 shows the heterogeneous porting process of HADVPPM from the CPU to the NVIDIA GPU and domestic GPU-like accelerator. First, the original Fortran code was refactored using the standard C language. Then, the CUDA and ROCm HIP were used to convert the standard C code into CUDA C and HIP C code to make it computable on the NVIDIA GPU and the domestic GPU-like accelerator. Similar to CUDA technology, HIP technology is implemented to convert the standard C code to HIP C code by adding related built-in functions (such as hipMalloc, hipMemcpy, hipFree). To facilitate the portability of applications across different GPU platforms, ROCm provides HIPIFY toolkits to help transcode. The HIPIFY toolkit is essentially a simple script written in the Perl language, and its function is text replacement, which replaces the function name in CUDA C code with the corresponding name in HIP C code according to specific rules. For example, the HIPIFY toolkit can automatically recognize and replace the memory allocation function cudaMalloc in CUDA with hipMalloc. Therefore, the thread and block configuration of the GPU remains unchanged due to the simple text substitution during the transcoding. In this study, the ROCm HIP technology was used to implement the operation of GPU-HADVPPM on the domestic GPU-like accelerator based on the CUDA version of GPU-HADVPPM developed by Cao et al. (2023a). The HIP code was compiled using the “hipcc” compiler driver with the library flag “-lamdhip64”.
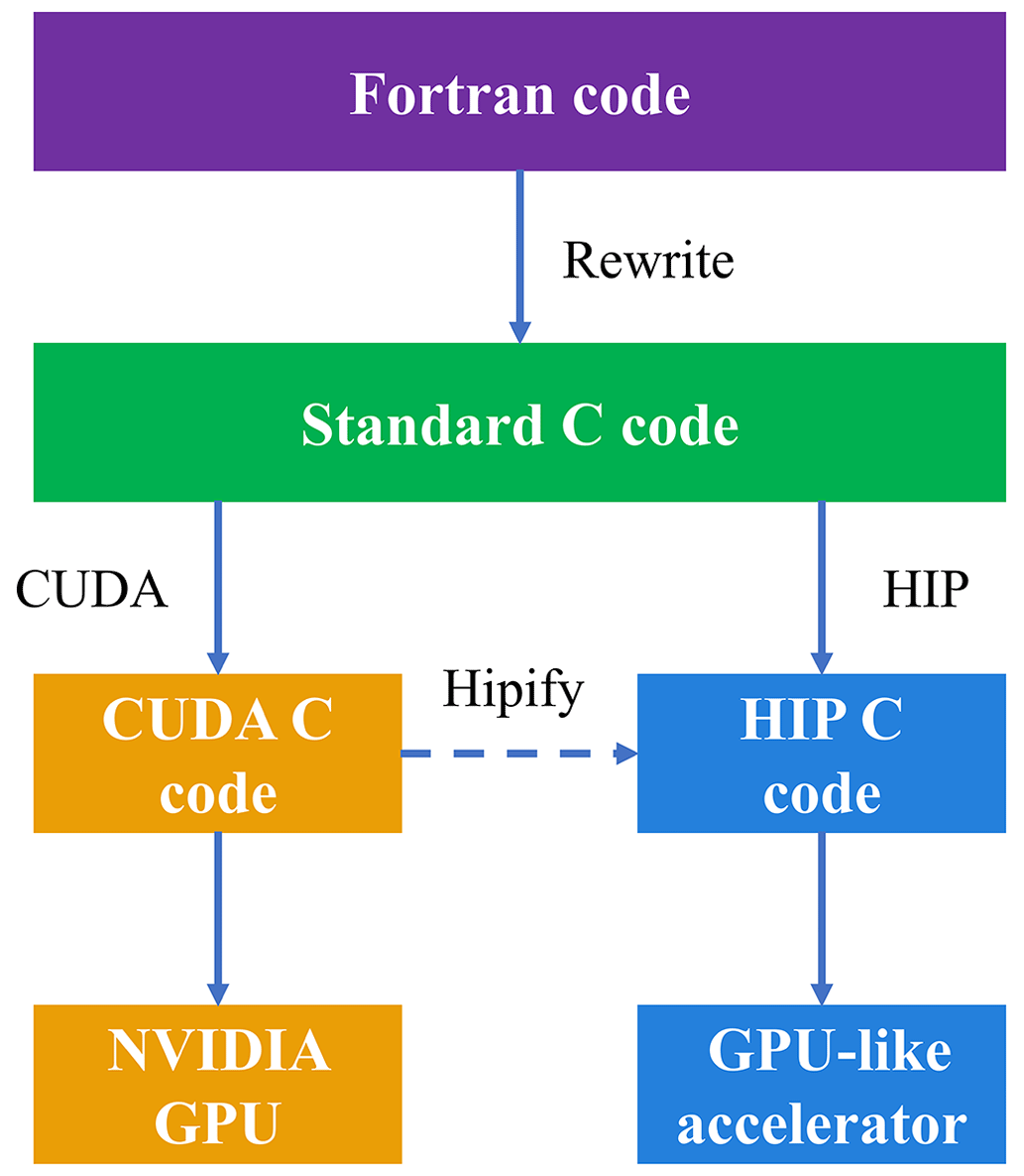
Figure 1The heterogeneous porting process of HADVPPM Fortran code from the CPU to the NVIDIA GPU and domestic GPU-like accelerator.
3.2 Multi-level hybrid parallelization of the CAMx model on heterogeneous platform
The original CAMx model running on the CPUs supports two types of parallelization (ENVIRON, 2014): (1) OpenMP (OMP), which supports multi-platform (e.g. multi-core) shared-memory programming in C/C and Fortran, and (2) message passing interface (MPI), which is a message passing interface standard for developing and running parallel applications on the distributed-memory computer cluster. During the process of the CAMx model simulation, MPI and OMP hybrid parallelism can be used, several CPU processes can be launched, and each process can spawn several threads. This hybrid parallelism can significantly improve the computational efficiency of the CAMx model.
As mentioned, the original CAMx model supports message passing interface (MPI) parallel technology running on the general-purpose CPU. The simulation domain is divided into several sub-regions by MPI, and each CPU process is responsible for the computation of its sub-region. To expand the heterogeneous parallel scale of the CAMx model on the Songshan supercomputer, a hybrid parallel architecture with an MPI and HIP was adopted to make full use of GPU computing resources. Firstly, we use the ROCm-HIP library function hipGetDeviceCount to obtain the number of GPU accelerators configured for each compute node. Then, the total number of accelerators to be launched and the ID number of accelerator cards in each node were determined according to the MPI process ID number and the remainder function in standard C language. Finally, the hipSetDevice library function in ROCm-HIP is used to configure an accelerator for each CPU core.
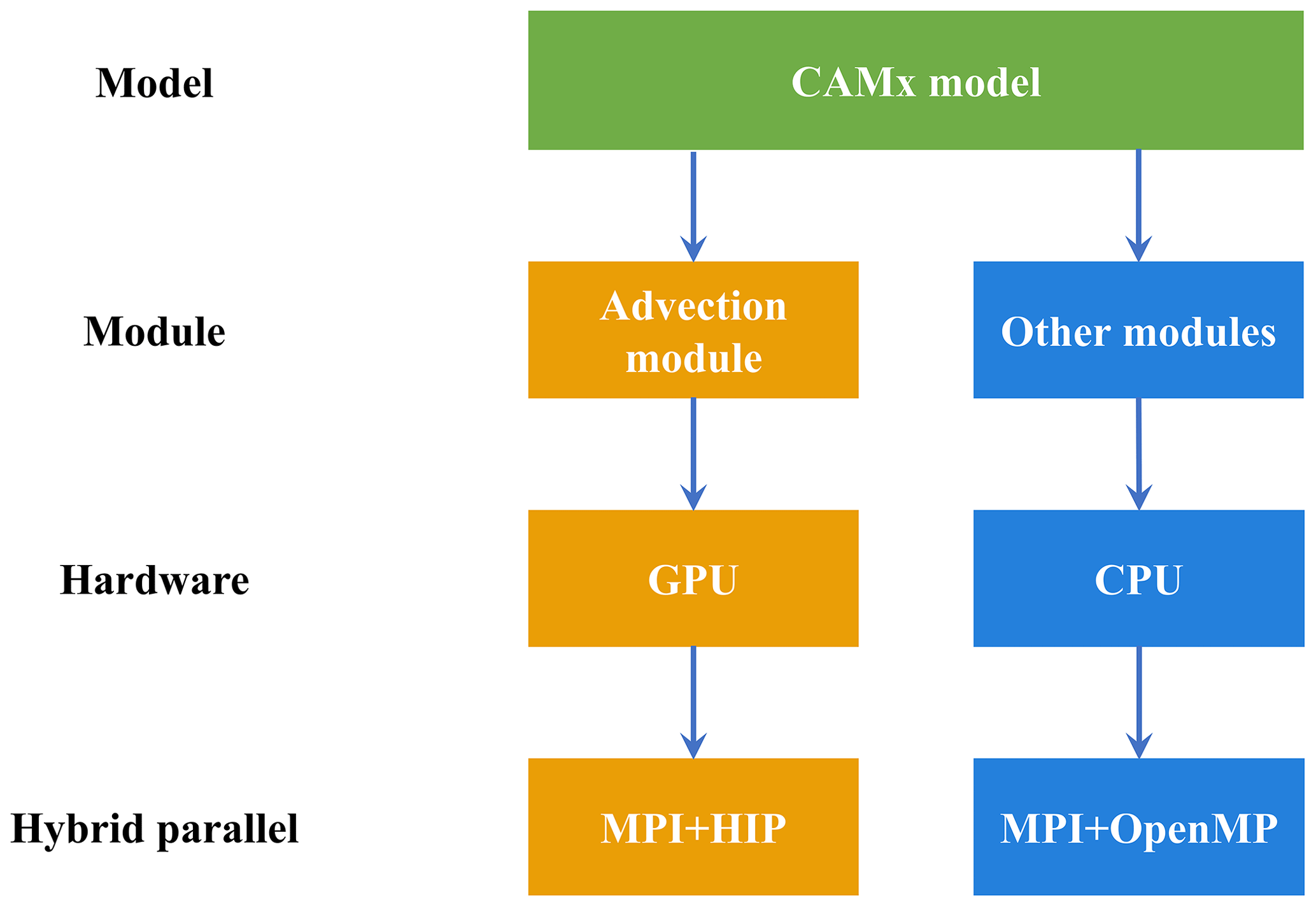
This study uses GPU-HADVPPM with an MPI and HIP heterogeneous hybrid programming technology to run on multiple domestic GPU-like accelerators. However, the number of GPU-like accelerators in a single compute node is usually much smaller than the number of CPU cores in heterogeneous HPC systems. Therefore, to make full use of the remaining CPU computing resources, the OMP API of the CAMx model is further introduced to realize the MPI plus OMP hybrid parallelism of other modules on the CPU. A schematic of the multi-level hybrid parallel framework is shown in Fig. 2. For example, four CPU processes and four GPU-like accelerators are launched in a computing node, and each CPU process spawns four threads. Then the advection module is simulated by four GPU-like accelerators, and 4×4 threads spawned by CPU processes do the other modules.
The computational performance experiments of the CUDA and HIP GPU-HADVPPM version are reported in this section. First, we compared the simulation result of the Fortran version CAMx model with the CAMx-CUDA and CAMx-HIP models, which were coupled with the CUDA and HIP versions of the GPU-HADVPPM program, respectively. Then, the computational performance of GPU-HADVPPM programs on the NVIDIA GPU and domestic GPU-like accelerator is compared. Finally, we tested the total performance of the CAMx-HIP model with multi-level hybrid parallelization on the Songshan supercomputer. For ease of description, the CAMx versions of the HADVPPM program written in Fortran, CUDA C, and HIP C code are named Fortran, CUDA, and HIP, respectively.
4.1 Experimental setup
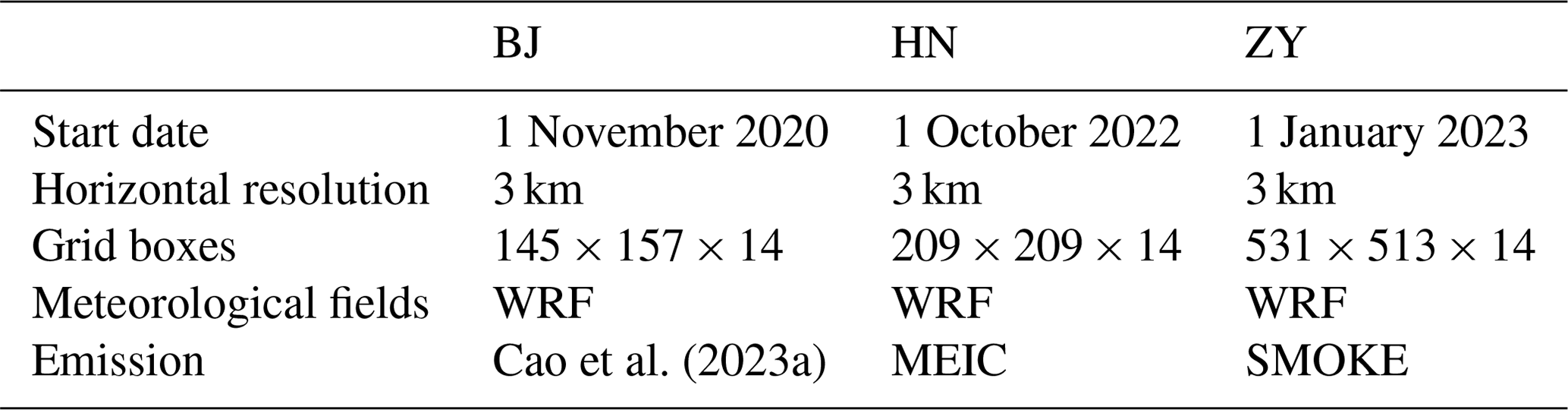
Three test cases were used to evaluate the performance of the CUDA and HIP GPU-HADVPPM version. The experimental setup for the three test cases is shown in Table 2. In the previous study of Cao et al. (2023a), the Beijing (BJ) case was used to carry out the performance tests, and the Henan (HN) case and Zhongyuan (ZY) case were the newly constructed test cases in this study. The BJ case covers Beijing, Tianjin, and part of Hebei Province with 145 × 157 grid boxes, and the simulation of the BJ case starts on 1 November 2020. The HN case mainly covers Henan Province with 209 × 209 grid boxes. The starting date of simulation in the HN case is 1 October 2022. The ZY case has the widest coverage of the three cases, with Henan Province as the centre, covering the Beijing–Tianjin–Hebei region, Shanxi Province, Shaanxi Province, Hubei Province, Anhui Province, Jiangsu Province, and Shandong Province, with 531 × 513 grid boxes. The ZY case started simulation on 4 January 2023. All three performance test cases have a 3 km horizontal resolution, 48 h of simulation, and 14 vertical model layers. The number of three-dimensional grid boxes in the BJ, HN, and ZY cases totals 318 710, 611 534, and 3 813 642, respectively. The meteorological fields inputting the different versions of the CAMx model in the three cases were provided by the Weather Research and Forecasting Model (WRF). In terms of emission inventories, the emission for the BJ case is consistent with Cao et al. (2023a); the HN case uses the Multi-resolution Emission Inventory for China (MEIC). The ZY case uses the emission constructed by the Sparse Matrix Operator Kernel Emission (SMOKE) model in this study.
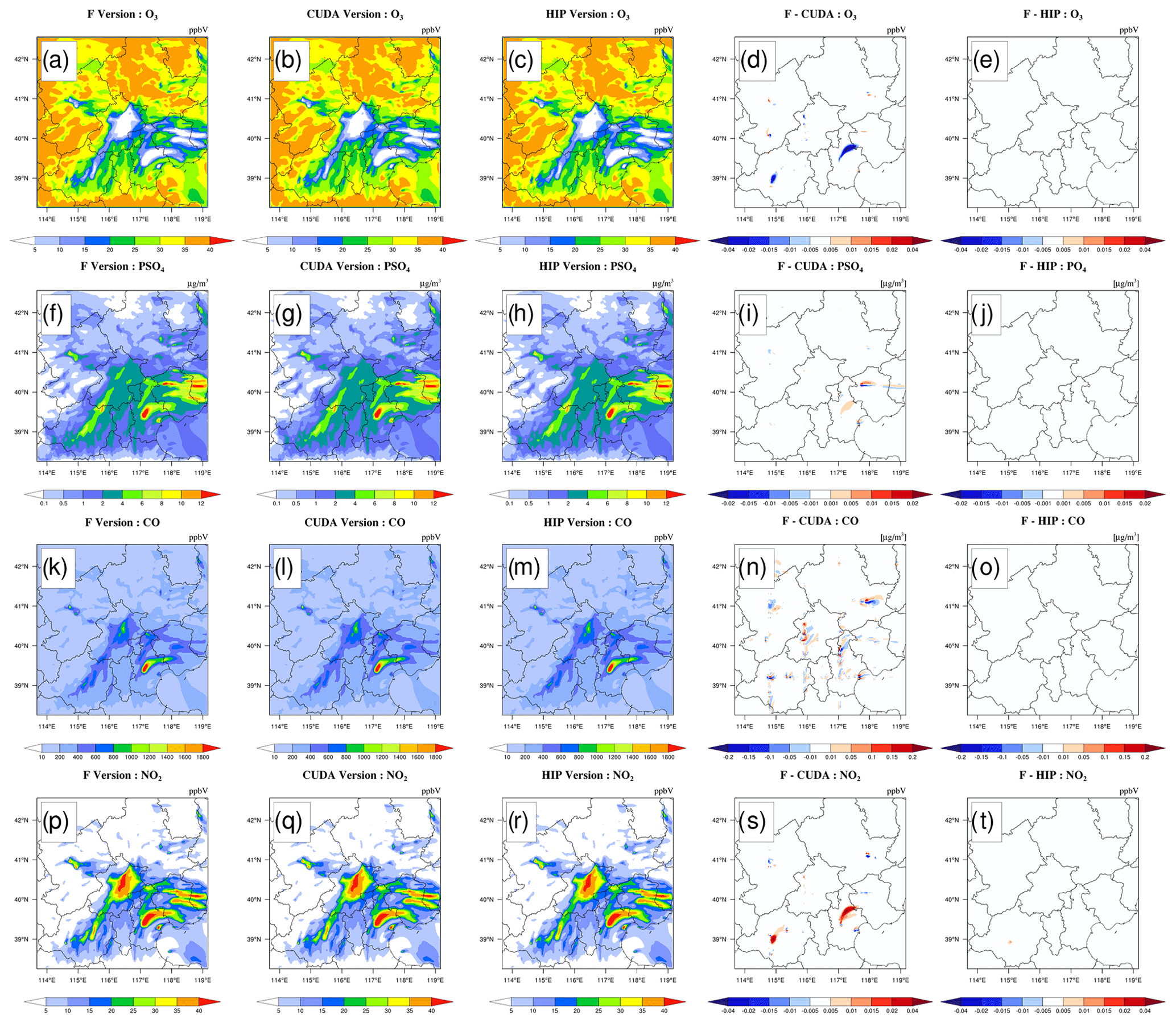
Figure 3O3, PSO4, CO, and NO2 concentrations outputted by the CAMx Fortran version on the Intel E5-2682 v4 CPU, CUDA version on the NVIDIA K40m cluster, and HIP version on the Songshan supercomputer in the BJ case. Panels (a), (f), (k), and (p) are from the Fortran version of simulation results for four species. Panels (b), (g), (l), and (q) are from the CUDA version of simulation results for four species. Panels (c), (h), (m), and (r) are from the HIP version of simulation results for four species. Panels (d), (i), (n), and (s) are the absolute errors (AEs) between the Fortran and CUDA versions. Panels (e), (j), (o), and (t) are the AEs between the Fortran and HIP versions.
4.2 Error analysis
The hourly concentrations of four major species, i.e. O3, PSO4, CO, and NO2, outputted by the Fortran, CUDA, and HIP versions of CAMx for the BJ case are compared to verify the correctness of the results before testing the computational performance. Figure 3 shows the simulation results of the four major species of the three CAMx versions, including the Fortran version on the Intel E5-2682 v4 CPU, the CUDA version on the NVIDIA K40m cluster, and the HIP version on the Songshan supercomputer, after 48 h integration, as well as the absolute errors (AEs) of their concentrations. As described by Cao et al. (2023a), the parallel design of the CAMx model adopts the primary and secondary mode, and the P0 process is responsible for inputting and outputting the data and calling the MPI_Barrier function to synchronize the process; the other processes are accounted for in the simulation. When comparing the simulation results, we only launched two CPU processes on the CPU platform and launched two CPU processes and configured two GPU accelerators on the NVIDIA K40m cluster and Songshan supercomputer, respectively.
The species' spatial pattern of the three CAMx versions on different platforms are visually very consistent. The AEs between the HIP and Fortran versions are much smaller than the CUDA and Fortran versions. For example, the AEs between the CUDA and Fortran versions for O3, PSO4, and NO2 are in the range of ± 0.04 ppbV, ± 0.02 µg m−3, and ± 0.04 ppbV. The AEs between the HIP and Fortran versions for the three species fall into the range of ± 0.01 ppbV, ± 0.005 µg m−3, and ± 0.01 ppbV. For CO, AEs are relatively large due to their high background concentration. However, the AEs between the HIP and Fortran versions are also less than those between the CUDA and Fortran versions, which were in the range of ± 0.4 and ± 0.1 ppbV, respectively.
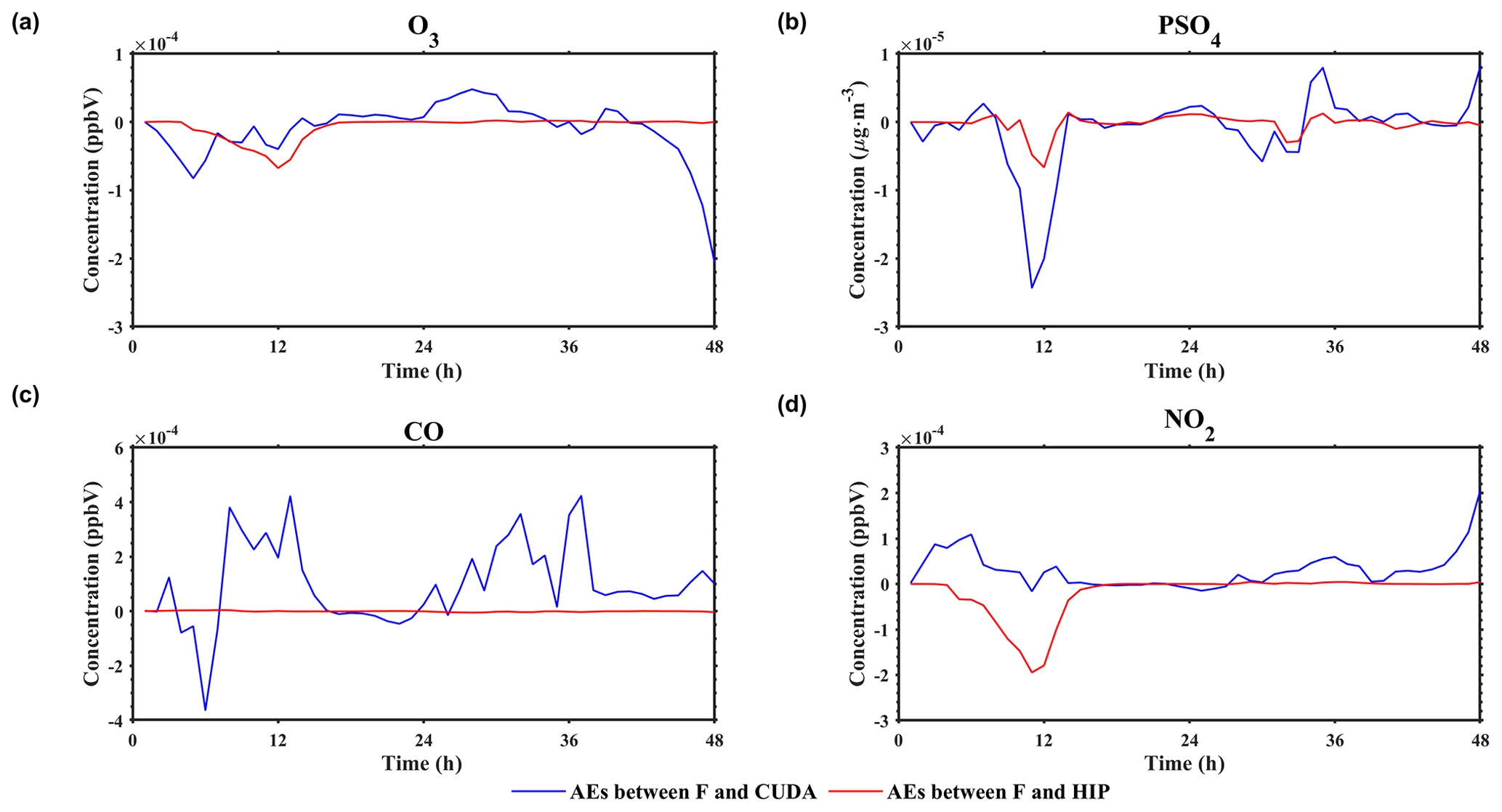
Figure 4After grid-averaging, the time series of AEs between the Fortran and CUDA versions (solid blue line) and between the Fortran and HIP versions (solid red line). Panels (a–d) represent the AEs of O3, PSO4, CO, and NO2, respectively.
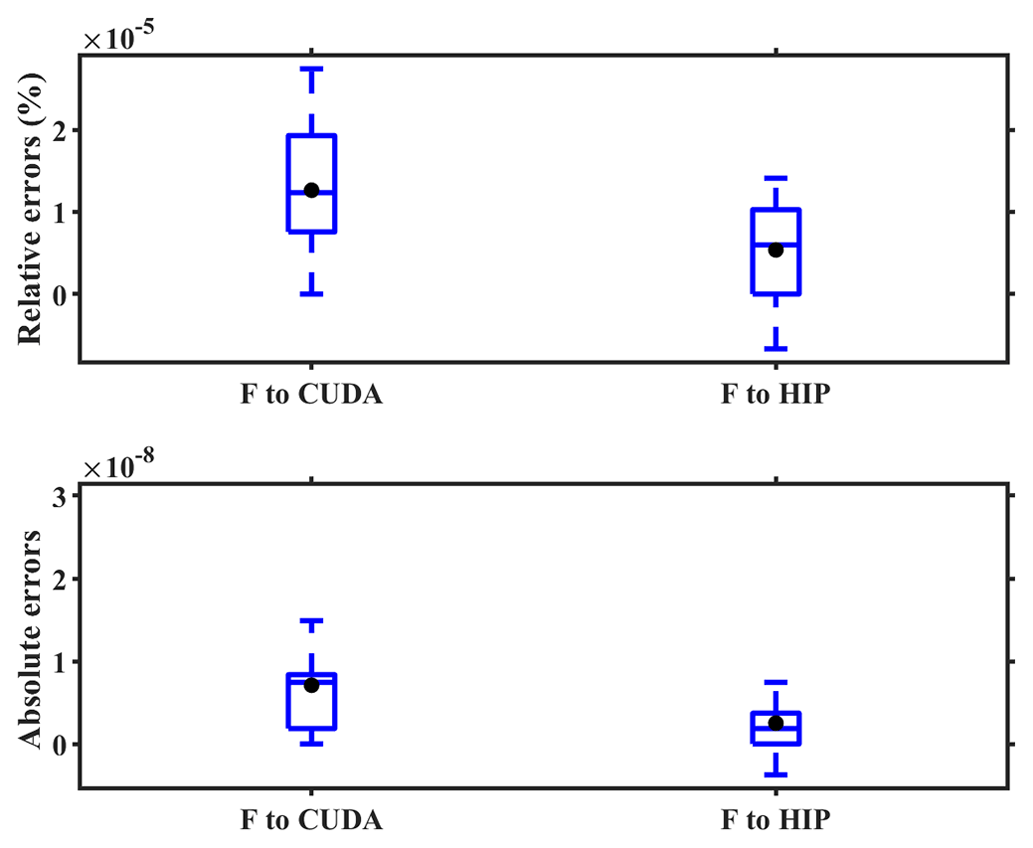
Figure 5The boxplots of relative errors (REs) and AEs between the Fortran code on the Intel Xeon E5-2682 v4 CPU and CUDA C code on NVIDIA Tesla K40m GPU and between the HIP C code on domestic GPU-like accelerator in the case of offline testing.
Considering the situation of AE accumulation and growth, Fig. 4 highlights the time series of AEs between the Fortran and CUDA versions and between the Fortran and HIP versions after grid-averaging. As is shown in Fig. 4, the AEs of O3, PSO4, CO, and NO2 between the Fortran version and the CUDA version are −0.0002 to 0.0001 ppbV, −0.00003 to 0.00001 µg m−3, −0.0004 to 0.0004 ppbV, and −0.0002 to 0.0002 ppbV, respectively, and fluctuate. Although the AEs of the above four species between the Fortran and the HIP version also fluctuate, the fluctuation range is much smaller than that of the CUDA version. Notably, the AEs between the Fortran and CUDA versions and between the Fortran and HIP versions do not accumulate and grow over prolonged simulation periods.
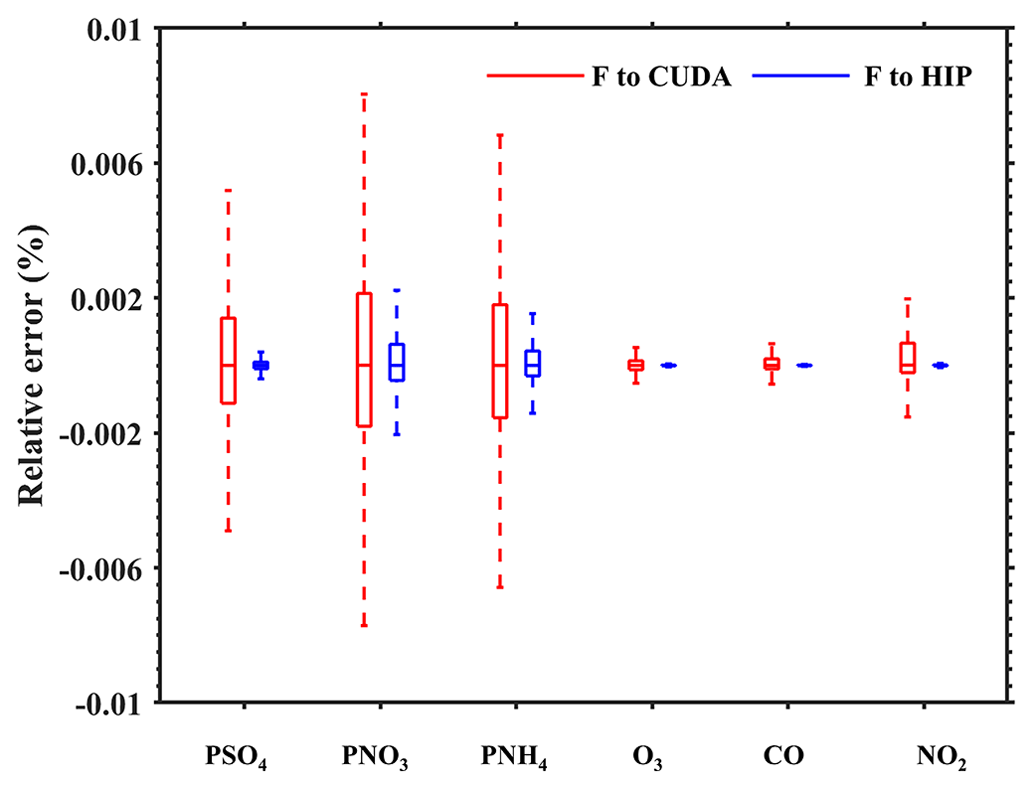
Figure 6The RE distributions in all grid boxes for PSO4, PNO3, PNH4, O3, CO, and NO2 for the BJ case. The red boxplot represents the REs between the CUDA version on the NVIDIA K40m cluster and the Fortran version on the Intel E5-2682 v4 CPU, and the blue boxplot represents the REs between the HIP version on the Songshan supercomputer and the Fortran version on the Intel E5-2682 v4 CPU.
To further detail the differences in the simulation results, we supplement the offline experimental results of the advection module on the NVIDIA K40m cluster and the Songshan supercomputer. First, we construct the Fortran programs to provide consistent input data for the advection module written in CUDA C code and HIP C code on the NVIDIA Tesla K40m GPU and domestic GPU-like accelerator, respectively. The accuracy of the input data is kept at 12 decimal places. Then, the advection module outputs and prints the computing results after completing one integration operation on different accelerators. Finally, the results of the various accelerators were compared with those of the Fortran code on the Intel Xeon E5-2682 v4 CPU processor. The specific results are shown in Fig. 5. The difference in the computing results of the advection module written in HIP C code on the domestic GPU-like accelerator is smaller than that of the CUDA C code on the NVIDIA Tesla K40m GPU. The mean relative errors (REs) and AEs of the computing results on the NVIDIA Tesla K40m GPU are 1.3 × 10−5 % and 7.1 × 10−9 %, respectively, while on the domestic GPU-like accelerator, the mean REs and AEs of the results are 5.4 × 10−6 % and 2.6 × 10−9 %, respectively.
Figure 6 further presents the boxplot of the REs in all grid boxes for PSO4, PNO3, PNH4, O3, CO, and NO2 during the 48 h simulation in the BJ case. Statistically, the REs between the CUDA version on the NVIDIA K40m cluster and the Fortran version on the Intel E5-2682 v4 CPU for the six species above are in the range of ± 0.006 %, ± 0.01 %, ± 0.008 %, ± 0.002 %, ± 0.002 %, and ± 0.002 %. In terms of REs between the HIP version on the Songshan supercomputer and the Fortran version on the Intel E5-2682 v4 CPU, the values are much smaller than REs between the CUDA and Fortran versions, which fall into the range of ± 0.0005 %, ± 0.004 %, ± 0.004 %, ± 0.00006 %, ± 0.00004 %, and ± 0.00008 %, respectively. In the air quality model, the initial concentration of secondary fine particulate matter such as PSO4, PNO3, and PNH4 is very low and is mainly generated by complex chemical reactions. The integration process of the advection module is ported from the CPU processor to the GPU accelerator, which will lead to minor differences in the results due to different hardware. The low initial concentration of secondary fine particulate matter is sensitive to these minor differences, which may eventually lead to a higher difference in the simulation results of secondary particulate matter than other species.
Table 3The standard deviation (SD) of O3, PSO4, CO, and NO2 on the Intel Xeon E5-2682 v4 CPU; root mean square error (RMSE); and RMSE and SD ratio on the NVIDIA V100 cluster, NVIDIA K40m cluster, and Songshan supercomputer.
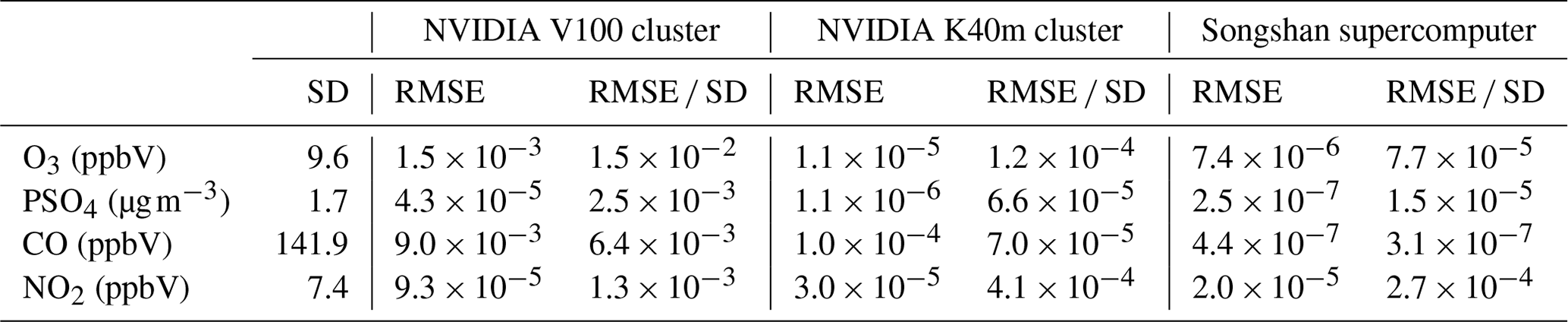
Wang et al. (2021) verified the applicability of the numerical model in scientific research by computing the ratio of root mean square error (RMSE) between two different model versions to system spatial variation (standard deviation, SD). If the ratio is smaller, it is indicated that the difference in the simulation results of the model on the GPU is minimal compared with the spatial variation of the system. That is to say, the simulation results of the model on the GPU are accepted for scientific research. Here, we calculate the standard deviation of O3, PSO4, CO, and NO2 on the Intel Xeon E5-2682 v4 CPU and their RMSE between the NVIDIA V100 cluster, NVIDIA K40m cluster, Songshan supercomputer, and the Intel Xeon E5-2682 v4 CPU, which are presented in Table 3. The SDs for the above four species on the Intel Xeon E5-2682 v4 CPU are 9.6 ppbV, 1.7 µg m−3, 141.9, and 7.4 ppbV, respectively, and their ratios of RMSE and SD on the Songshan supercomputer are 5.8 × 10−5 %, 4.8 × 10−6 %, 5.7 × 10−8 %, and 2.1 × 10−4 %, which are smaller than the two NVIDIA clusters and significantly much smaller than the NVIDIA V100 cluster. For example, the ratios on the NVIDIA K40m cluster for the four species are 1.2 × 10−4 %, 6.6 × 10−5 %, 7.0 × 10−5 %, and 4.1 × 10−4 %, and the ratios on the NVIDIA V100 cluster are 1.5 × 10−2 %, 2.5 × 10−3 %, 6.4 × 10−3 %, and 1.3 × 10−3 %, respectively.
From AEs, REs, and the ratio of RMSE and SD between different CAMx versions, there is less difference than when the GPU-HADVPPM4HIP program runs on the Songshan supercomputer. Because the simulation accuracy of the geoscience numerical model is closely related to the model efficiency and many model optimization works improve the computational performance by reducing the precision of the data, Váňa et al. (2017) changed some variables' precision in the atmospheric model from double precision to single precision, which increased the overall computational efficiency by 40 %, and Wang et al. (2019) improved the computational efficiency of the gas-phase chemistry module in the air quality mode by 25 %–28 % by modifying the floating-point precision compile flag. Therefore, we speculate that this may be related to the manufacturing process of NVIDIA GPUs and domestic GPU-like accelerators, which may use unknown optimizations to improve GPU performance efficiency by losing part of the accuracy. In this study, we mainly focus on numerical simulation. Of course, we also want to know the specific reasons for this. Still, we are not professional GPU research and development designers after all, and we do not know the underlying design logic of the hardware, so we can only present our experimental results in the air pollution model to you and discuss them to jointly promote the application of GPUs in the field of geoscience numerical models.
4.3 Application performance
4.3.1 GPU-HADVPPM on a single GPU accelerator
As described in Sect. 4.2, we validate the 48 h simulation results outputted by the Fortran, CUDA, and HIP versions of the CAMx model. Next, computational performance was compared for the Fortran version of HADVPPM on the Intel Xeon E5-2682 v4 CPU and domestic CPU processor A, the CUDA version of GPU-HADVPPM on the NVIDIA Tesla K40m and V100 GPU, and the HIP version of GPU-HADVPPM on the domestic GPU-like accelerator A, in the BJ, HN and ZY cases. The simulation time in this section is 1 h unless otherwise specified.
Similarly, since the CAMx model adopts the primary and secondary mode, two CPU processes, P0 and P1, are launched on the CPU, and the system_clock functions in the Fortran language are used to test the elapsed time of the advection module in the P1 process. When testing the computation performance of the advection module on the GPU-like accelerator, we only launch two CPU processes and two GPU-like accelerators. When a P1 process runs to the advection module, the original computation process is migrated from the CPU to the GPU, and the hipEvent_t function in the HIP programming is used to test the running time of the advection module on the GPU-like accelerator. When comparing the speedup on different GPU accelerators, the elapsed time of the advection module launched for one CPU process (P1) on the domestic CPU processor A is taken as the benchmark; that is to say that the speedup is 1.0×. The runtime of the advection module on the Intel CPU processor and the different GPU accelerators is compared with the baseline to obtain the speedup.
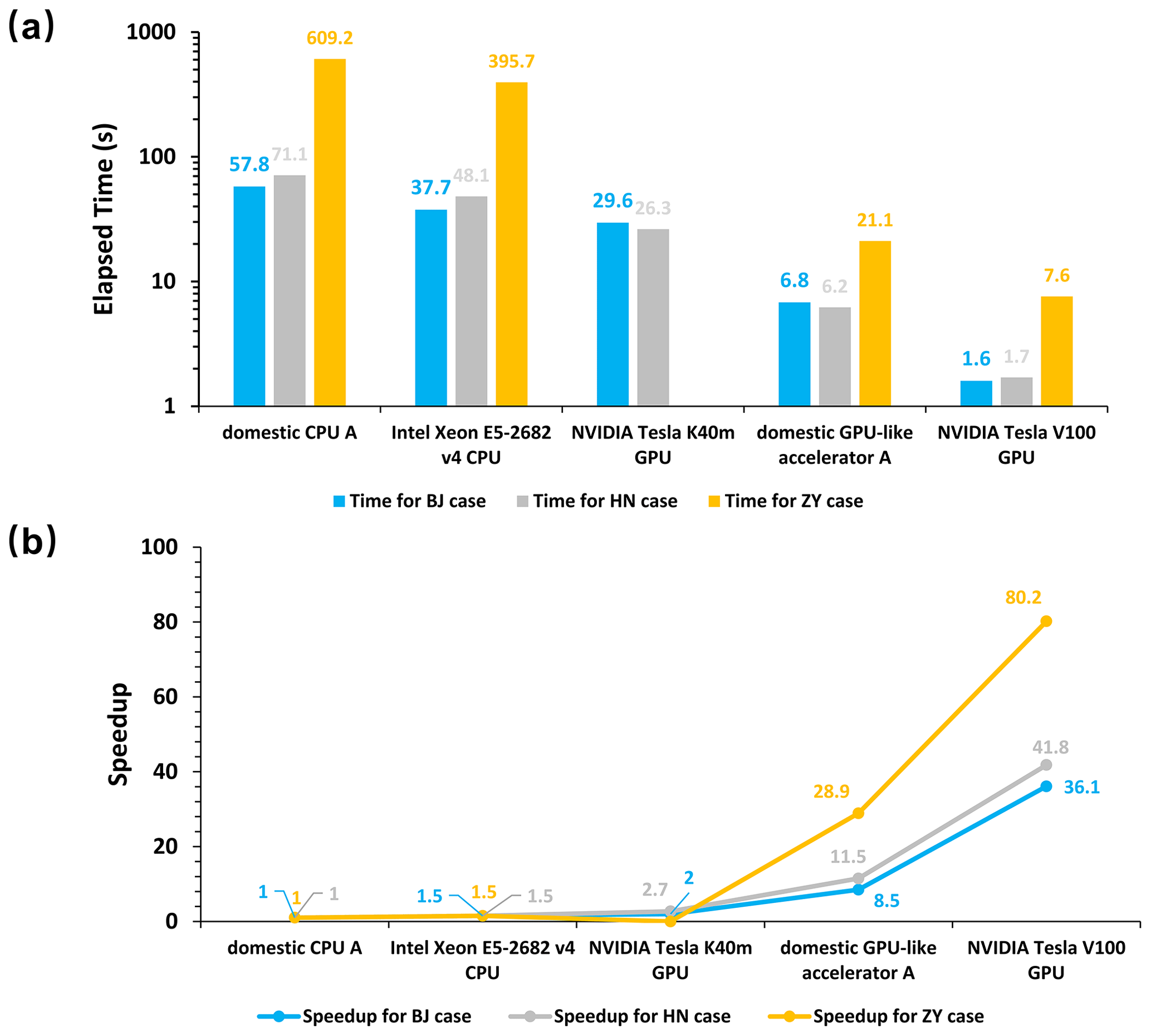
Figure 7The elapsed time (a) and speedup (b) of the Fortran version of HADVPPM on the Intel Xeon E5-2682 v4 CPU and the domestic CPU processor A, the CUDA version of GPU-HADVPPM on the NVIDIA Tesla K40m GPU and NVIDIA Tesla V100 GPU, and the HIP version of GPU-HADVPPM on the domestic GPU-like accelerator A for the BJ, HN, and ZY cases. The unit of elapsed time is seconds (s).
Figure 7a and b show the elapsed time and speedup of the different versions of HADVPPM on the CPU processors and GPU accelerators for the BJ, HN, and ZY cases, respectively. The results show that the CUDA and HIP technology to port HADVPPM from the CPU to the GPU can significantly improve its computational efficiency. For example, the elapsed time of the advection module on the domestic processor A is 609.2 s in the ZY case. After it is ported to the domestic GPU accelerator and NVIDIA Tesla V100 GPU, it only takes 21.1 and 7.6 s to complete the computing, and the speedups are 28.9× and 80.2×, respectively. The ZY case had the most significant number of grids in the three cases. It exceeded the memory of a single NVIDIA Tesla K40m GPU accelerator, so it was not possible to test its elapsed time on it. Moreover, the optimization of thread and block co-indexing is used to compute the grid point in the horizontal direction simultaneously (Cao et al., 2023a). Therefore, it can be seen from Fig. 6b that the larger the computing scale, the more pronounced the acceleration, which indicates that the GPU is more suitable for super-large-scale parallel computing and provides technical support for accurate and fast simulation of ultra-high-resolution air quality at the metre level in the future.
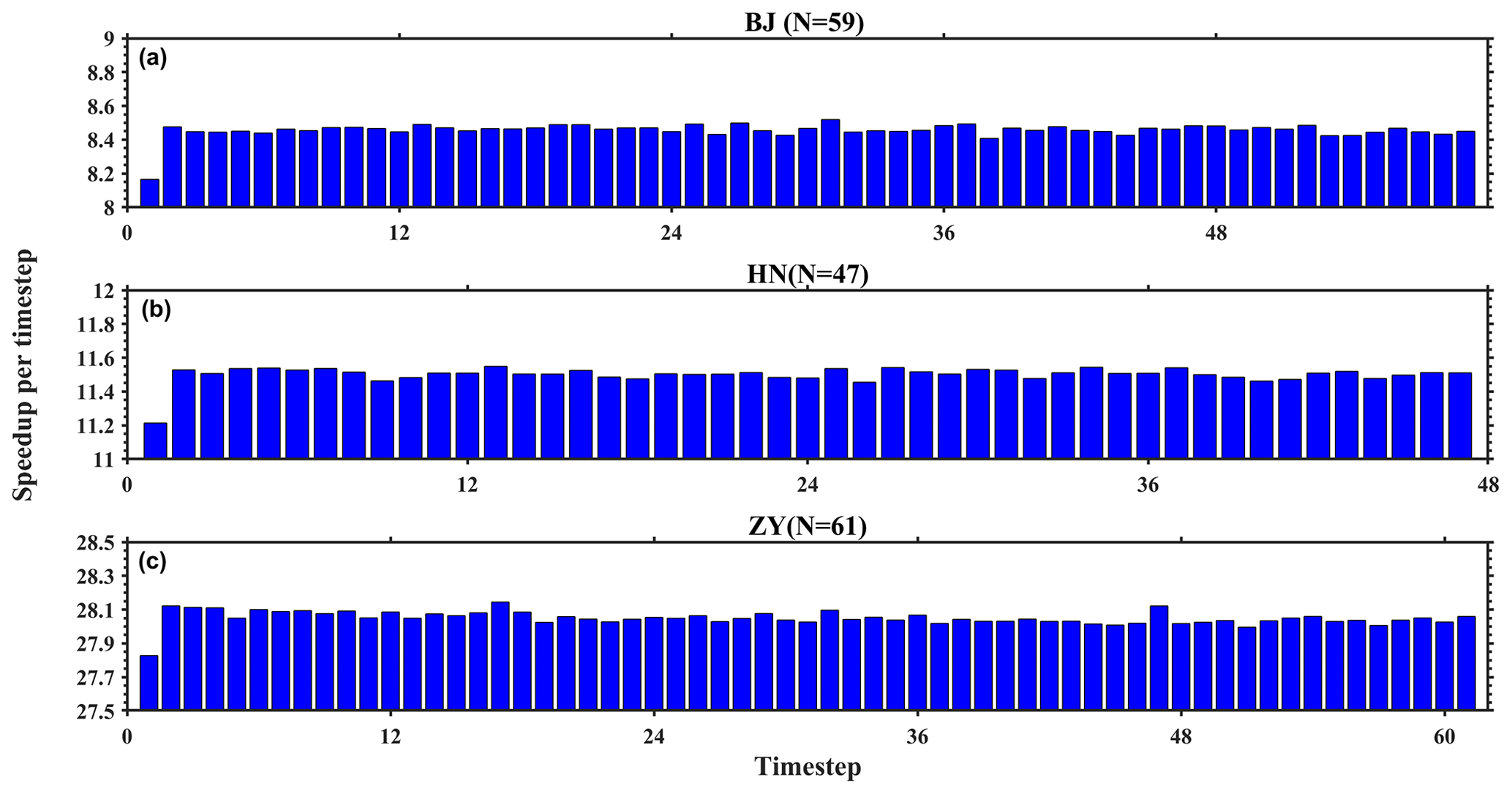
Figure 8The GPU-HADVPPM4HIP acceleration in each time step on a single GPU-like accelerator for the BJ, HN, and ZY cases. The time step of the above three cases are 59, 47, and 61, respectively.
The BJ, HN, and ZY case time steps were 59, 47, and 61, respectively. Figure 8 shows the GPU-HADVPPM4HIP acceleration in each time step on the single, domestic GPU-like accelerator A. It can be seen from the figure that all three cases have the smallest speedups of 8.2×, 11.2×, and 27.8× at the first time step, which is related to the time required for GPU-like accelerator startup. When the GPU-like accelerator is started and operating normally, the speedup of the three cases tends to be stable in the following time steps and to stabilize around 8.5×, 11.5×, and 28.0×, respectively.
Table 4The total elapsed time of the CAMx Fortran and HIP versions for the BJ case on the Songshan supercomputer and Taiyuan computing platform, as well as the computing time of the advection module with and without data transfer. The unit of elapsed time is seconds (s).

Table 4 further lists the total elapsed time of the CAMx Fortran and HIP versions for the BJ case on the Songshan supercomputer and Taiyuan computing platform and the computing time of the advection module with and without data transfer. By coupling the GPU-HADVPPM4HIP to the CAMx model and adopting a series of optimizations (Cao et al., 2023a), such as communication optimization, memory access optimization, and 2D thread optimization, the overall computation time of the CAMx-HIP model on a single, domestic GPU-like accelerator is faster than that of the original Fortran version on a single, domestic CPU core. For example, on the Songshan supercomputer, 1 h of simulation in the CAMx-HIP model takes 469 s, and the Fortran version takes 481 s. On the Taiyuan computing platform, the acceleration effect is more evident due to the upgrade of hardware and network bandwidth. The integration time of the CAMx-HIP model is 433 s when maintaining the same software environment, and the integration time of the Fortran version is 453 s.
The elapsed time of GPU-HADVPPM given in Table 4 on the NVIDIA GPU and domestic GPU-like accelerator does not consider the data transfer time between CPU and GPU. However, the communication bandwidth of data transfer between the CPU and GPU is one of the most significant factors that restrict the performance of the numerical model on the heterogeneous cluster (Mielikainen et al., 2012; Mielikainen et al., 2013; Huang et al., 2013). To illustrate the significant impact of CPU–GPU data transfer efficiency, the computational performance of GPU-HADVPPM with and without data transfer time for the BJ case is tested on the Songshan supercomputer and Taiyuan computing platform with the same DTK version 23.04 software environment, and the results are further presented in Table 4. For convenience of description, we refer to the execution time of the GPU-HADVPPM program on the GPU kernel as kernel execution time and the time of GPU-HADVPPM running on the GPU as total runtime, which contains two parts, namely, kernel execution time and data transfer time between CPU and GPU. After testing, the kernel execution time and total running time of the GPU-HADVPPM4HIP program on the domestic GPU-like accelerator A are 6.8 and 29.8 s, respectively. In other words, it only takes 6.8 s to complete the computation on the domestic accelerator. Still, it takes 23.0 s to complete the data transfer between the CPU and the domestic GPU-like accelerator, which is 3.4× the computation time. The same problem exists in the more advanced Taiyuan computing platform, where the GPU-HADVPPM4HIP takes only 5.7 s to complete the computation, while the data transmission takes 18.2 s, 3.2× the computation time.
By comparing the kernel execution time and total running time of GPU-HADVPPM4HIP on the domestic accelerator, it can be seen that the data transfer efficiency between CPU and GPU is inefficient, which seriously restricts the computational performance of numerical models in heterogeneous clusters. On the one hand, improving the data transfer bandwidth between CPU and GPU can improve the computational efficiency of the model in heterogeneous clusters. On the other hand, optimization measures can be implemented to improve the data transfer efficiency between CPU and GPU. For example, (1) asynchronous data transfer reduces the communication latency between CPU and GPU. Computation and data transfer are performed simultaneously to hide communication overhead. (2) Currently, some advanced GPU architectures support a unified memory architecture, so the CPU and GPU can share the same memory space and avoid frequent data transfers. This reduces the overhead of data transfer and improves data transfer efficiency. (3) Cao et al. (2023a) adopted communication optimization measures to minimize the communication frequency in the one-time integration step to one, but there is still the problem of high communication frequency in the whole simulation. In the future, we will consider porting other hotspots of the CAMx model or even the entire integral module except I/O to GPU-like accelerators for increasing the proportion of code on the GPU and reducing the frequency of CPU–GPU communication.
Video memory and bandwidth are the two most significant factors affecting GPU performance, and high video memory and high bandwidth can play the powerful computing performance of GPUs better. Usually, the memory and bandwidth of the GPU are already provided by the factory. In this case, the amount of data transferred to the GPU can be roughly estimated before the data are transferred to the GPU. The amount of data transferred to the GPU can be adjusted according to the size of the GPU memory to ensure that the amount of data transferred to the GPU each time reaches the maximum GPU video memory to give full play to the GPU performance more efficiently.
4.3.2 CAMx-HIP model on the heterogeneous cluster
Generally, heterogeneous HPC systems have thousands of compute nodes equipped with one or more GPUs on each compute node. To fully use multiple GPUs, the hybrid parallelism with an MPI and HIP paradigm was used to implement the HIP version of GPU-HADVPPM run on multiple domestic GPU-like accelerators. During the simulation of the CAMx model, the emission, advection, dry deposition, diffusion, wet deposition, photolysis process, and chemical process will be computed sequentially. In heterogeneous computing platforms, except for the advection process, the CPU processor completes the simulation of the rest of the processes, and the advection process is completed on the GPU accelerator. For example, using MPI and HIP hybrid parallel technology to launch four CPU processes and four GPU accelerators simultaneously, the advection process is completed on four GPUs, and the other processes are still completed on four CPU processes.
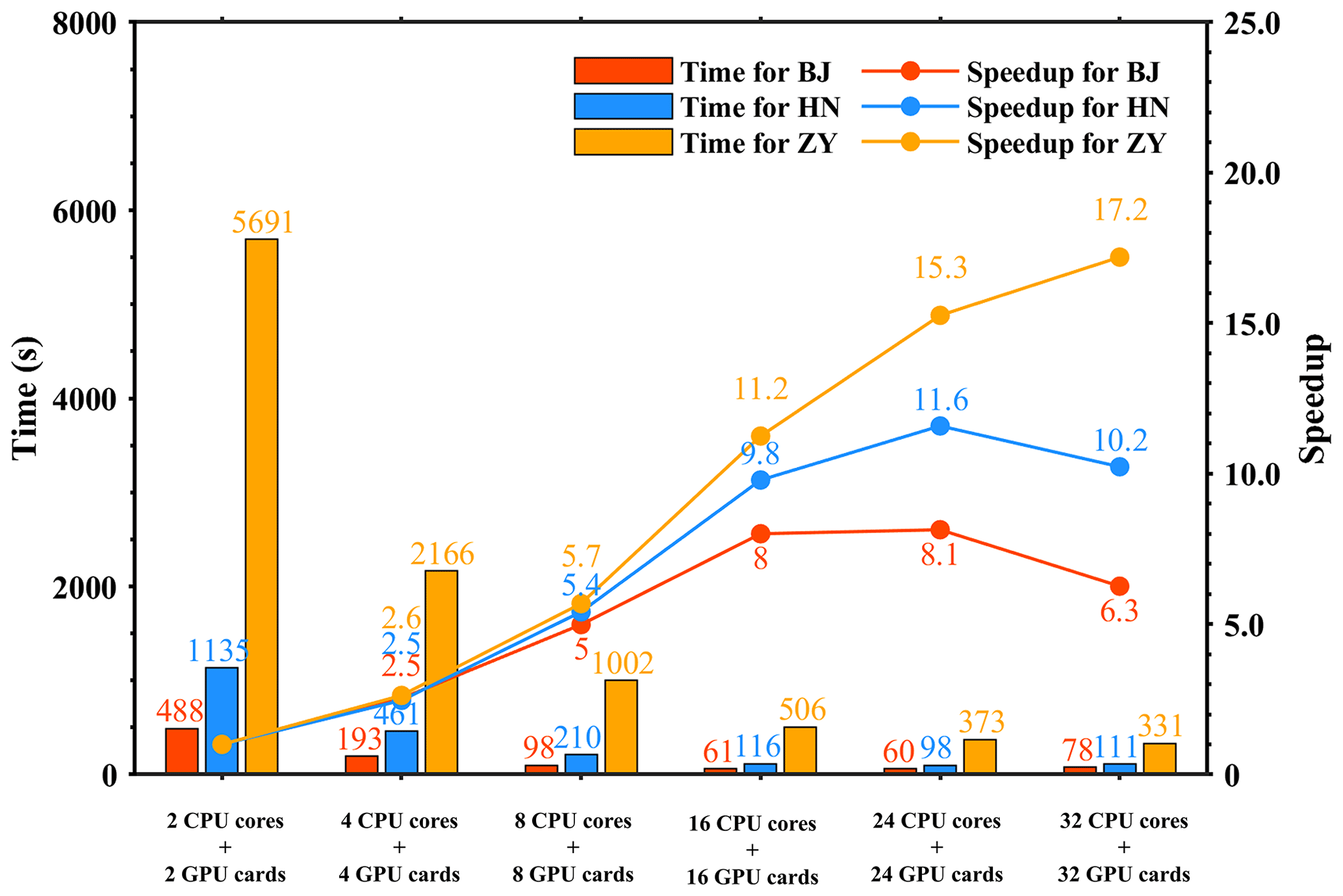
Figure 9The total elapsed time and speedup of the CAMx-HIP model on the Songshan supercomputer in the BJ, HN, and ZY cases. The unit is seconds (s).
Figure 9 shows the total elapsed time and speedup of the CAMx-HIP model, which is coupled with the HIP GPU-HADVPPM version on the Songshan supercomputer in the BJ, HN, and ZY cases. The simulation of the above three cases for 1 h took 488, 1135, and 5691 s, respectively, when launching two domestic CPU processors and two GPU-like accelerators. For the BJ and HN cases, the parallel scalability is highest when configured with 24 CPU cores and 24 GPU-like accelerators, with speedups of 8.1× and 11.6×, respectively. Regarding the ZY case, due to its large number of grids, the parallel scalability is the highest when 32 CPU cores and 32 GPU-like accelerators are configured, and the acceleration ratio is 17.2×.
As mentioned above, data transfer between CPU and GPU takes several times more time than computation. Regardless of the CPU–GPU data transfer consumption, GPU-HADVPPM4HIP can achieve an up to 28.9× speedup on a single, domestic GPU-like accelerator. However, in terms of the total time consumption, the CAMx-HIP model is only 10–20 s faster than the original Fortran version when one GPU-like accelerator is configured. As the number of CPU cores and GPU-like accelerators increases, the overall computing performance of the CAMx-HIP model is lower than that of the original Fortran version. The main reason is related to the amount of data transferred to the GPU. As the number of MPI processes increases, the number of grids responsible for each process decreases, and the amount of data transmitted by the advection module from the CPU to the GPU decreases. However, GPUs are suitable for large-scale matrix computing. When the data scale is small, the performance of the GPU is low, and the communication efficiency between the CPU and GPU is the biggest bottleneck (Cao et al., 2023a). Therefore, the computational performance of the CAMx-HIP model is not as good as the original Fortran version when MPI processes increase. According to the characteristics of GPUs suitable for large-scale matrix computing, the model domain can be expanded, and the model resolution can be increased in the future to ensure that the amount of data transferred to each GPU reaches the maximum video memory occupation to make efficient use of the GPU. In addition, the advection module only accounts for about 10 % of the total time consumption in the CAMx model (Cao et al., 2023a). In the future, porting the entire integration module except I/O to the GPU is supposed to minimize the communication frequency.
The number of GPU accelerators in a single compute node is usually much smaller than the number of CPU cores in heterogeneous HPC systems. Using the hybrid parallel paradigm with MPI and HIP to configure one GPU accelerator for each CPU process results in idle computing resources for the remaining CPU cores. Therefore, the multi-level hybrid parallelism scheme was introduced to further improve the total computational performance of the CAMx-HIP model. As described in the Sect. 3.2, MPI and HIP technology accelerates the horizontal advection module, and the other modules, such as the photolysis module, deposition module, and chemical module, which run on the CPU are accelerated by MPI and OMP under the framework of the multi-level hybrid parallelism.
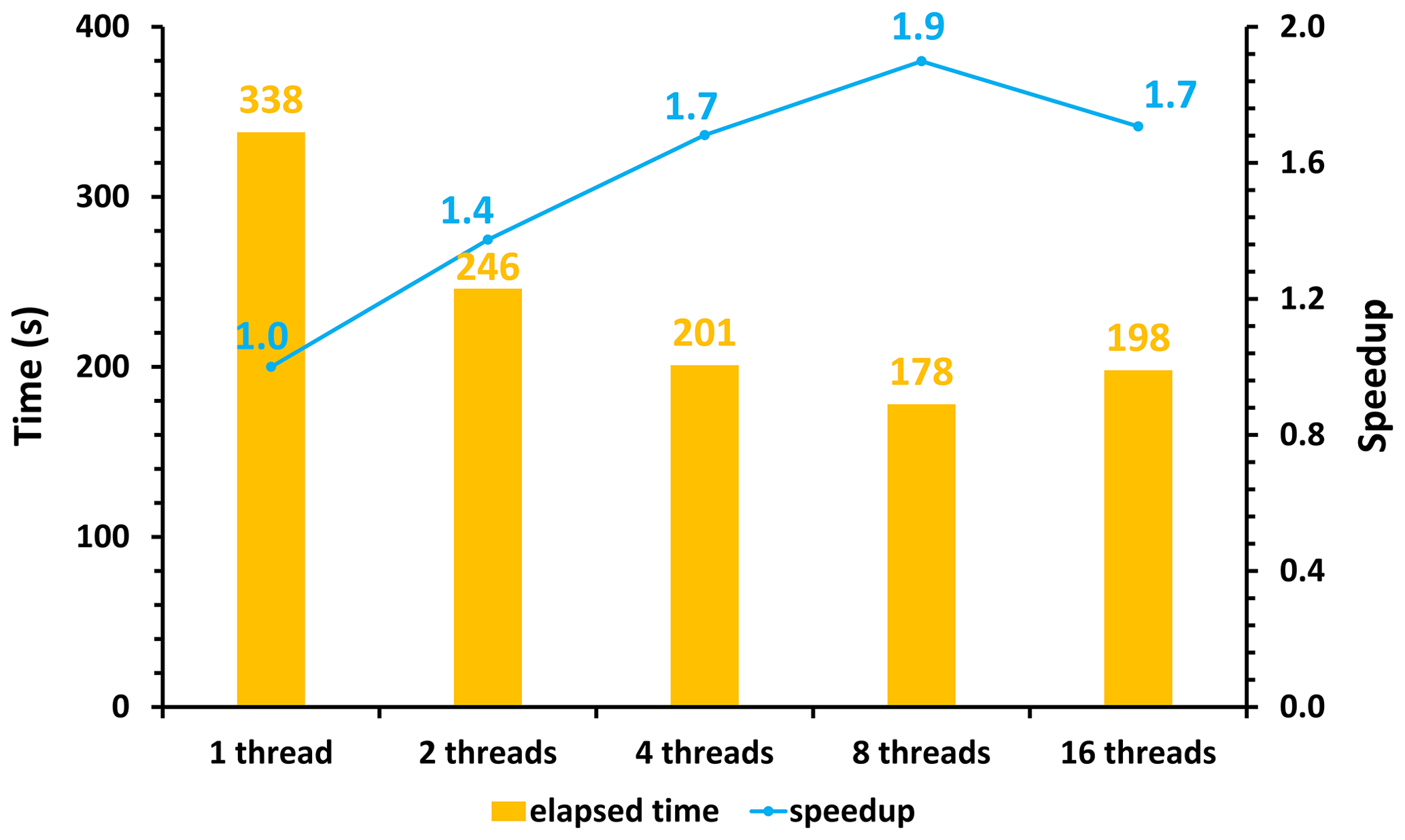
Figure 10The total elapsed time and speedup of the CAMx-HIP model when implementing the multi-level hybrid parallelism in the ZY case. The unit is seconds (s).
The ZY case achieved the maximum speedup when launching the 32 domestic CPU processors and GPU-like accelerators. Figure 10 shows the total elapsed time and speedup of the CAMx-HIP model in the same configuration when further implementing the multi-level hybrid parallelism on the Songshan supercomputer. The AEs of the simulation results between the CAMx-HIP model and CAMx-HIP model with the OMP technology are within ± 0.04 ppbV, and the specified results are shown in Fig. S1 in the Supplement. As the number of threads increases, the elapsed time of the CAMx-HIP model is further reduced. When a CPU core launches eight threads, the 1 h integration time in the CAMx-HIP model was reduced from 338 to 178 s, with a maximum acceleration of 1.9×.
GPUs have become an essential part of providing processing power for high-performance computing applications, especially in geoscience numerical models. Implementing super-large-scale parallel computing of numerical models on GPUs has become one of the significant directions of its future development. This study implemented the ROCm HIP technology to port the GPU-HADVPPM from the NVIDIA GPUs to China's domestic GPU-like accelerators. Further, it introduced the multi-level hybrid parallelism scheme to improve the total computational performance of the CAMx-HIP model on China's domestic heterogeneous cluster.
The consistency of model simulation results is a significant prerequisite for heterogeneous porting. However, the experimental results show that the deviation between the CUDA version and the Fortran version of the CAMx model and the deviation between the HIP version and the Fortran version of the CAMx model are within the acceptable range, and the simulation difference between the HIP version of the CAMx model and Fortran version of the CAMx model is more minor. Moreover, the BJ, HN, and ZY test cases can achieve an 8.5×, 11.5×, and 28.9× speedup, respectively, when the HADVPPM program is ported from the domestic CPU processor A to the domestic GPU-like accelerator A. The experimental results of different cases show that the larger the computing scale, the more obvious and more pronounced the acceleration effect of the GPU-HADVPPM program, indicating that the GPU is more suitable for super-large-scale parallel computing and will provide technical support for the accurate and fast simulation of ultra-high-resolution air quality at the metre level in the future. The data transfer bandwidth between CPU and GPU is one of the most important factors affecting the computational efficiency of the numerical model in heterogeneous clusters, as shown by the fact that the elapsed time of the GPU-HADVPPM program on the GPU only accounts for 7.3 % and 23.8 % when considering the data transfer time between CPU and GPU on the Songshan supercomputer and Taiyuan computing platform. Therefore, optimizing the data transfer efficiency between CPU and GPU is one of the important directions for the porting and adaptation of geoscience numerical models on heterogeneous clusters in the future.
There is still potential to further improve the computational efficiency of the CAMx-HIP model in the future. First is to improve the data transfer efficiency of GPU-HADVPPM between the CPU and the GPU and reduce the data transfer time. Second is to increase the proportion of HIP C code in the CAMx-HIP model on the domestic GPU-like accelerator and port other modules of the CAMx-HIP model to the domestic GPU-like accelerator for computing. Finally, the data type of some variables could be changed from double precision to single precision, and the mixed-precision method is used to further improve the CAMx-HIP computing performance.
The source codes of CAMx version 6.10 are available at https://www.camx.com/download/source/ (last access: 9 September 2024, ENVIRON, 2023). The datasets, the CAMx-HIP codes, and the offline test code related to this paper are available online via ZENODO (https://doi.org/10.5281/zenodo.12747391, Cao and Wu, 2024), and the CAMx-CUDA code is available online via ZENODO (https://doi.org/10.5281/zenodo.7765218, Cao et al., 2023b).
The supplement related to this article is available online at: https://doi.org/10.5194/gmd-17-6887-2024-supplement.
KC and QW conducted the simulation and prepared the materials. QW, LiW, and LaW planned and organized the project. KC, QW, HG, HW, XT, and LL refactored and optimized the codes. LiW, NW, HC, DongxL, and DongqL collected and prepared the data for the simulation. KC, HW, QW, and HG validated and discussed the model results. KC, QW, LiW, NW, XT, HG, and LaW took part in the discussion.
The contact author has declared that none of the authors has any competing interests.
Publisher's note: Copernicus Publications remains neutral with regard to jurisdictional claims made in the text, published maps, institutional affiliations, or any other geographical representation in this paper. While Copernicus Publications makes every effort to include appropriate place names, the final responsibility lies with the authors.
The National Key R&D Program of China (grant no. 2020YFA0607804), the National Supercomputing Center in Zhengzhou Innovation Ecosystem Construction Technology Special Program (grant no. 201400210700), GHfund A (grant no. 202302017828), and the Beijing Advanced Innovation Program for Land Surface funded this work. The authors would like to thank the High Performance Scientific Computing Center (HSCC) of Beijing Normal University for providing some high-performance computing environment and technical support.
This research has been supported by the National Key Research and Development Program of China (grant no. 2020YFA0607804) and the Key Research and Development Program of Henan Province (grant no. 241111212300).
This paper was edited by Patrick Jöckel and reviewed by Daniel Caviedes-Voullième and one anonymous referee.
Alvanos, M. and Christoudias, T.: GPU-accelerated atmospheric chemical kinetics in the ECHAM/MESSy (EMAC) Earth system model (version 2.52), Geosci. Model Dev., 10, 3679–3693, https://doi.org/10.5194/gmd-10-3679-2017, 2017.
AMD: ROCm Documentation Release 5.7.1, Advanced Micro Devices Inc., https://rocm.docs.amd.com/en/docs-5.7.1 (last access: 9 September 2024), 2023.
Bott, A.: A Positive Definite Advection Scheme Obtained by Nonlinear Renormalization of the Advective Fluxes, Mon. Weather Rev., 117, 1006–1016, https://doi.org/10.1175/1520-0493(1989)117<1006:APDASO>2.0.CO;2, 1989.
CAMx: A multi-scale photochemical modeling system for gas and particulate air pollution, ENVIRON International Corporation, https://www.camx.com/ (last access: 20 October 2023), 2023.
Cao, K. and Wu, Q.: The dataset of the manuscript “GPU-HADVPPM4HIP V1.0: higher model accuracy on China's domestically GPU-like accelerator using heterogeneous compute interface for portability (HIP) technology to accelerate the piecewise parabolic method (PPM) in an air quality model (CAMx V6.10)”, Zenodo [data set], https://doi.org/10.5281/zenodo.12747391, 2024.
Cao, K., Wu, Q., Wang, L., Wang, N., Cheng, H., Tang, X., Li, D., and Wang, L.: GPU-HADVPPM V1.0: a high-efficiency parallel GPU design of the piecewise parabolic method (PPM) for horizontal advection in an air quality model (CAMx V6.10), Geosci. Model Dev., 16, 4367–4383, https://doi.org/10.5194/gmd-16-4367-2023, 2023a.
Cao, K., Wu, Q., Wang, L., Wang, N., Cheng, H., Tang, X.,Li, D., and Wang, L.: The dataset of the manuscript “GPUHADVPPM V1.0: high-efficient parallel GPU design of the Piecewise Parabolic Method (PPM) for horizontal advection in air quality model (CAMx V6.10)”, Zenodo [data set], https://doi.org/10.5281/zenodo.7765218, 2023b.
Colella, P. and Woodward, P. R.: The Piecewise Parabolic Method (PPM) for gas-dynamical simulations, J. Comput. Phys., 54, 174–201, https://doi.org/10.1016/0021-9991(84)90143-8, 1984.
ENVIRON: User Guide for Comprehensive Air Quality Model with Extensions Version 6.1, ENVIRON International Corporation, https://www.camx.com/Files/CAMxUsersGuide_v6.10.pdf (last access: 9 September 2024), 2014.
ENVIRON: CAMx version 6.1, ENVIRON International Corporation [code], https://camx-wp.azurewebsites.net/download/source/, last access: 20 October 2023.
Huang, M., Huang, B., Mielikainen, J., Huang, H. L. A., Goldberg, M. D., and Mehta, A.: Further Improvement on GPUBased Parallel Implementation of WRF 5-Layer Thermal Diffusion Scheme, in: 2013 International Conference on Parallel and Distributed Systems, Seoul, South Korea, 15–18 December 2013, https://doi.org/10.1109/icpads.2013.126, 2013.
Linford, J. C., Michalakes, J., Vachharajani, M., and Sandu, A.: Automatic Generation of Multicore Chemical Kernels, IEEE T. Parall. Distr., 22, 119–131, https://doi.org/10.1109/tpds.2010.106, 2011.
Mielikainen, J., Huang, B., Huang, H.-L. A., and Goldberg, M. D.: GPU Implementation of Stony Brook University 5-Class Cloud Microphysics Scheme in the WRF, IEEE J. Sel. Top. Appl., 5, 625–633, https://doi.org/10.1109/jstars.2011.2175707, 2012.
Mielikainen, J., Huang, B., Wang, J., Allen Huang, H. L., and Goldberg, M. D.: Compute unified device architecture (CUDA)-based parallelization of WRF Kessler cloud microphysics scheme, Comput. Geosci., 52, 292–299, https://doi.org/10.1016/j.cageo.2012.10.006, 2013.
News: Frontier Remains as Sole Exaflop Machine and Retains Top Spot, Improving Upon Its Previous HPL Score, TOP500 international organization, https://www.top500.org/news/frontier-remains-sole-exaflop-machine-and-retains-top-spot-improving-upon-its-previous-hpl-score/ (last access: 20 October 2023), 2023.
NVIDIA: CUDA C Programming Guide Version 10.2, NVIDIA Corporation, https://docs.nvidia.com/cuda/archive/10.2/pdf/CUDA_C_Programming_Guide.pdf (last access: 20 October 2023), 2020.
Odman, M. and Ingram, C.: Multiscale Air Quality Simulation Platform (MAQSIP): Source Code Documentation and Validation, Technical report, MCNCNorth Carolina Supercomputing Center, Research Triangle Park, North Carolina, 83 pp., ENV-96TR002, 1996.
ROCm: AMD ROCm-HIP documentation, Advanced Micro Devices Inc., https://rocm.docs.amd.com/en/docs-5.0.0 (last access: 20 October 2023), 2023.
Sun, J., Fu, J. S., Drake, J. B., Zhu, Q., Haidar, A., Gates, M., Tomov, S., and Dongarra, J.: Computational Benefit of GPU Optimization for the Atmospheric Chemistry Modeling, J. Adv. Model. Earth Sy., 10, 1952–1969, https://doi.org/10.1029/2018MS001276, 2018.
Top500: Supercomputing Top500 list, TOP500 international organization, https://www.top500.org/lists/top500/2023/06/ (last access: 20 October 2023), 2023.
Váňa, F., Düben, P., Lang, S., Palmer, T., Leutbecher, M., Salmond, D., and Carver, G.: Single Precision in Weather Forecasting Models: An Evaluation with the IFS, Mon. Weather Rev., 145, 495–502, https://doi.org/10.1175/mwr-d-16-0228.1, 2017.
Wang, H., Lin, J., Wu, Q., Chen, H., Tang, X., Wang, Z., Chen, X., Cheng, H., and Wang, L.: MP CBM-Z V1.0: design for a new Carbon Bond Mechanism Z (CBM-Z) gas-phase chemical mechanism architecture for next-generation processors, Geosci. Model Dev., 12, 749–764, https://doi.org/10.5194/gmd-12-749-2019, 2019.
Wang, P., Jiang, J., Lin, P., Ding, M., Wei, J., Zhang, F., Zhao, L., Li, Y., Yu, Z., Zheng, W., Yu, Y., Chi, X., and Liu, H.: The GPU version of LASG/IAP Climate System Ocean Model version 3 (LICOM3) under the heterogeneous-compute interface for portability (HIP) framework and its large-scale application , Geosci. Model Dev., 14, 2781–2799, https://doi.org/10.5194/gmd-14-2781-2021, 2021.