the Creative Commons Attribution 4.0 License.
the Creative Commons Attribution 4.0 License.
 | 26 Apr 2023
| 26 Apr 2023
The Common Community Physics Package (CCPP) Framework v6
Dominikus Heinzeller
Ligia Bernardet
Grant Firl
Man Zhang
Xia Sun
Michael Ek
The Common Community Physics Package (CCPP) is a collection of physical atmospheric parameterizations for use in Earth system models and a framework that couples the physics to a host model's dynamical core. A primary goal for this effort is to facilitate research and development of physical parameterizations and experimentation with physics–dynamics coupling methods while simultaneously offering capabilities for use in numerical weather prediction (NWP) operations. The CCPP Framework supports configurations ranging from process studies to operational NWP as it enables host models to assemble the parameterizations in flexible suites. Framework capabilities include variability in scheme call order; ability to group parameterizations for calls in different parts of the host model, allowing intervening computation or coupling to additional components; options to call some parameterizations more often than others; and automatic variable transformations.
The CCPP Framework was developed by the Developmental Testbed Center and is distributed with a single-column model that can be used to test innovations and to conduct hierarchical studies in which physics and dynamics are decoupled. It is also an integral part of the Unified Forecast System, a community-based, coupled, comprehensive Earth modeling system designed to support research and be the source system for the NOAA's operational NWP applications. Finally, the CCPP Framework is under various stages of adoption by a number of other models in the wider community.
- Article
(3885 KB) - Full-text XML
- BibTeX
- EndNote





The existence of shortcomings in the representation of physical processes has been identified as one of the primary sources of errors in numerical weather prediction (NWP) models, with other contributing factors being the imperfect specifications of initial conditions and inaccuracies introduced by the dynamical core, for example (Bauer et al., 2015; Du et al., 2018). In a NWP model, many physical processes are accounted for by often oversimplified parameterizations rather than as a result of strictly self-consistent consequences of the (nominally nonlinear and reactive) fluid dynamics both mediating and underlying weather systems (adapted from the glossary by American Meteorological Society, 2022). Therefore, the improvement in forecasts from NWP models hinges on the continuous advancement of physical parameterizations in concert with increases in numerical accuracy required to accommodate realistic transport and scale interactions as well in spatio-temporal resolutions of observations and their correct assimilation.
Examples of processes represented by the physical parameterizations in a NWP model are radiation, moist physics, vertical mixing, and interactions between the atmosphere and the underlying surface (Stensrud, 2007). State-of-the-art NWP models employ parameterizations of diverse complexity and may include representation of chemical processes that impact air composition and feed back on meteorological processes (Ahmadov et al., 2017). Parameterizations are typically used in sets called suites, which are constructed using compatible tasks that interact, ideally, consistently, often in addition to or with the aid of intermediate calculations. An important example of inter-parameterization communication is cloud–radiation feedback, which demands that the condensed water produced by the microphysics, macrophysics, convection, and planetary boundary layer parameterizations be communicated to the radiation parameterization to modify the radiative fluxes due to the presence of clouds (Črnivec and Mayer, 2019; Han et al., 2017; Bourgeois et al., 2016).
Parameterizations in modern NWP models are sophisticated and are typically the result of many years of work by a sizable number of subject matter experts. A suite may evolve through the incremental improvement in a parameterization, with a single code base being augmented to include the representation of additional processes (Han and Bretherton, 2019), or discretely, through the substitution of a parameterization with a distinct, more advanced, code base (Ukkonen et al., 2020). Therefore, it is crucial to have a software framework that can support collaborative and flexible development.
To meet this demand, the Developmental Testbed Center (DTC) has spearheaded the development of the Common Community Physics Package (CCPP), a model-agnostic collection of codes containing physical atmospheric parameterizations (CCPP Physics) along with a framework that connects the physics to host models (CCPP Framework). It is distributed with a single-column model (CCPP SCM), a simple host model that can be used with CCPP-compliant physics. This initiative is part of a broader effort to develop and improve the Unified Forecast System (UFS; Jacobs, 2021), a “community-based, coupled, comprehensive Earth modeling system [that spans] local to global domains and predictive time scales from sub-hourly analyses to seasonal predictions [and] is designed to support the weather enterprise and to be the source system for the NOAA's operational NWP applications” (Unified Forecast System – Steering Committee (UFS-SC) and Writing Team, 2021). The CCPP Physics contains the parameterizations that are used operationally in the atmospheric component of the UFS Weather Model (UFS Atmosphere), as well as parameterizations that are under development for possible transition to operations in the future (Zhang et al., 2020). The CCPP aims to support the broad community while simultaneously benefiting from the community. To realize that, the code is kept in public code repositories on GitHub (https://github.com/NCAR/ccpp-framework, last access: 23 April 2023, and https://github.com/NCAR/ccpp-physics, last access: 23 April 2023). Contributions to the CCPP Framework are reviewed and approved by representatives of the organizations conducting the majority of the development, the DTC and National Center for Atmospheric Research (NCAR), while contributions to the CCPP Physics are reviewed by the DTC and by points of contact for each parameterization. Any necessary changes in rules and standards are discussed and settled in the multi-institutional CCPP Framework developers committee or the CCPP Physics code management group. Parameterizations have been contributed by a number of scientists from various organizations, creating an ecosystem in which the CCPP can be used not only by operational centers to produce operational forecasts, but also by the research community to conduct investigation and development (see, for example, He et al., 2021). The CCPP provides the means for the necessary partnership and collaboration required to ensure that innovations created and effectively tested by the research community can be funneled back to the operational centers for further improvement of the operational forecasts.
There have been six major public releases of the CCPP thus far, starting with the v1 release in March 2018. The latest version is CCPP v6, released in June 2022 (Firl et al., 2022). The CCPP is a component of the public releases of the UFS Medium-Range Weather Application v1.1 (UFS Community, 2021) and the UFS Short-Range Weather Application (SRW App) v2.0 (UFS Community, 2022) and has been adopted by the NOAA's National Weather Service as the physics infrastructure for all upcoming operational implementations of the UFS (Unified Forecast System Steering Committee and Writing Team, 2021). It is targeted for transition to operations (Tallapragada et al., 2022) in 2023 as a component of the Hurricane Analysis and Prediction System (HAFS) and in 2024 as part of the Global Forecast System (GFS), Global Ensemble Forecast System (GEFS), and Rapid Refresh Forecast System (RRFS). In addition to the CCPP SCM and the UFS Atmosphere, the CCPP is being used in an experimental version of the Navy Environmental Prediction System Using the NUMA Core (NEPTUNE; Doyle et al., 2022), where NUMA stands for the Non-hydrostatic Unified Model of the Atmosphere. Furthermore, NCAR is investing in advancements for the CCPP Framework with the intention of adopting it as the physics interface for future versions of their System for Integrated Modeling of the Atmosphere (SIMA; Davis et al., 2019; Gill et al., 2020). The CCPP Framework is also part of the Multi-Scale Infrastructure for Chemistry and Aerosols (MUSICA), the NCAR-driven next-generation community infrastructure for research involving atmospheric chemistry and aerosols (Pfister et al., 2020).
Many current NWP models, such as the GFS and the NCAR Model for Prediction Across Scales (MPAS), rely on physics drivers to call parameterizations embedded in the host model code base. This lack of separation of concerns between host and physics compromises computational extensibility (because adding new parameterizations makes long drivers even longer), computational performance (because compiler optimization is hindered by all the possible runtime permutations), and ease of use (because code inspection is made difficult by the many paths and branches on the code). Additionally, this approach does not empower parameterization developers to simplify the development workflow by using the same code base in various host models. To enable the community involvement demanded by the aforementioned collaborations, the CCPP was established with several considerations: interoperability (the ability to run a given physics suite in various host models), portability, extensibility, computational efficiency, and ease of use. This effort builds on previous quests for physics interoperability, which started as early as the 1980s with the establishment of the so-called Kalnay rules (Kalnay et al., 1989) that outline coding standards to facilitate the exchange of parameterizations among models. These rules were later revised by members of the multi-agency National Earth System Prediction Capability (ESPC; now ICAMS) Physics Interoperability Committee to reflect advances in computational hardware and software used for operational NWP (Doyle et al., 2015). The CCPP further evolves earlier efforts in interoperability for physics; a noteworthy implementation of an infrastructure for interoperability is the Interoperable Physics Driver (IPD) devised by the NOAA Environmental Modeling Center (EMC) and later augmented by the NOAA Geophysical Fluid Dynamics Laboratory (GFDL) to run the physics used in the GFS in other host models (Whitaker et al., 2017). It complements similar efforts in other aspects of Earth system modeling, such as those aimed at enabling interoperability of component models (i.e., the atmospheric model, the ocean model) among various hosts via the standardization of interfaces (Theurich et al., 2016; Wieters and Barbi, 2019) and of physical constants (Chen et al., 2020).
This paper focuses on the CCPP Framework and provides an overview of the technical approach (Sect. 2), a description of the implementation (Sect. 3), an example of CCPP use in various host models (Sect. 4), and an outlook for the package (Sect. 5).
The design of the CCPP relies on standardization and automation, the latter requiring the former for an efficient implementation. All CCPP-compliant parameterizations have up to five entry point subroutines, corresponding to the model initialization, time step initialization, time step execution (time integration), time step finalization, and model finalization phases of the parameterization. Each entry point subroutine is accompanied by metadata (part of the CCPP code base and CCPP releases) describing the variables that are passed to and from that subroutine, including attributes such as standard name, long name, intent, units, type, rank, and activity status circumstances under which variables are used if they are optional. Similarly, the host model contains metadata (part of the host model's code base and host model releases) about variables that are available to be used by the parameterizations. The CCPP Framework compares and matches the standard names, much like a database key, of variables requested by the parameterizations against those supplied by the host model, making it possible for a given parameterization to be usable by various hosts. The CCPP Framework can convert units between requested and supplied variables, thus reducing the need for developers to build converters into their parameterizations. The Framework is further capable of handling blocked host model data that are used for improving the run time performance of the physics calls by processing them in parallel with multiple threads. It also provides debugging features that assist developers in their efforts by automatically checking variable allocations as well as the size and dimensions of variables.
The variable metadata that accompany the parameterizations are also used to generate aspects of the Scientific Documentation (Zhang et al., 2022). The CCPP employs the Doxygen software (van Heesch, 2022) to parse inline comments and additional information, such as parameterization descriptions, figures, and bibliography. These data are combined with the information from the metadata tables to generate documentation in hypertext markup language (HTML) format.
The CCPP Framework has access to a pool of compliant parameterizations contained in the CCPP Physics. The library can contain multiple parameterizations for different physical processes that a host model may execute during the physics calls. The choice of parameterizations (referred to as a suite) that will be invoked at runtime and the order in which they will be executed are defined through a suite definition file (SDF). The SDF is organized into groups of parameterizations, which are subsets of a suite that can be called from different locations in the host model. In other words, the physics suite does not have to be executed in a single step but can be interspersed with calls to other parts of the host model, such as dynamics and coupling with external components. In models that have shorter time steps for calls to dynamics than to physics, this CCPP capability enables the use of fast and slow physics, that is, it enables calling selected parameterizations from the dynamical core and executing them more often than the rest of the physics suite.
Through specifications in the SDF, the CCPP Framework allows the subcycling of parameterizations, that is, executing one or more parameterizations more than once in a physics time step. Subcycling can be used to increase the stability of the model and enable larger time steps by reducing the magnitude of the tendencies that need to be applied during each update of the model state variables. Subcycles can also be used to emulate an iteration, and a set of two subcycles can be used to set up a first guess and correction step for a parameterization. It is important to note that subcycling of schemes is only available in the run phase (see Sect. 3.2 for more information on the CCPP phases).
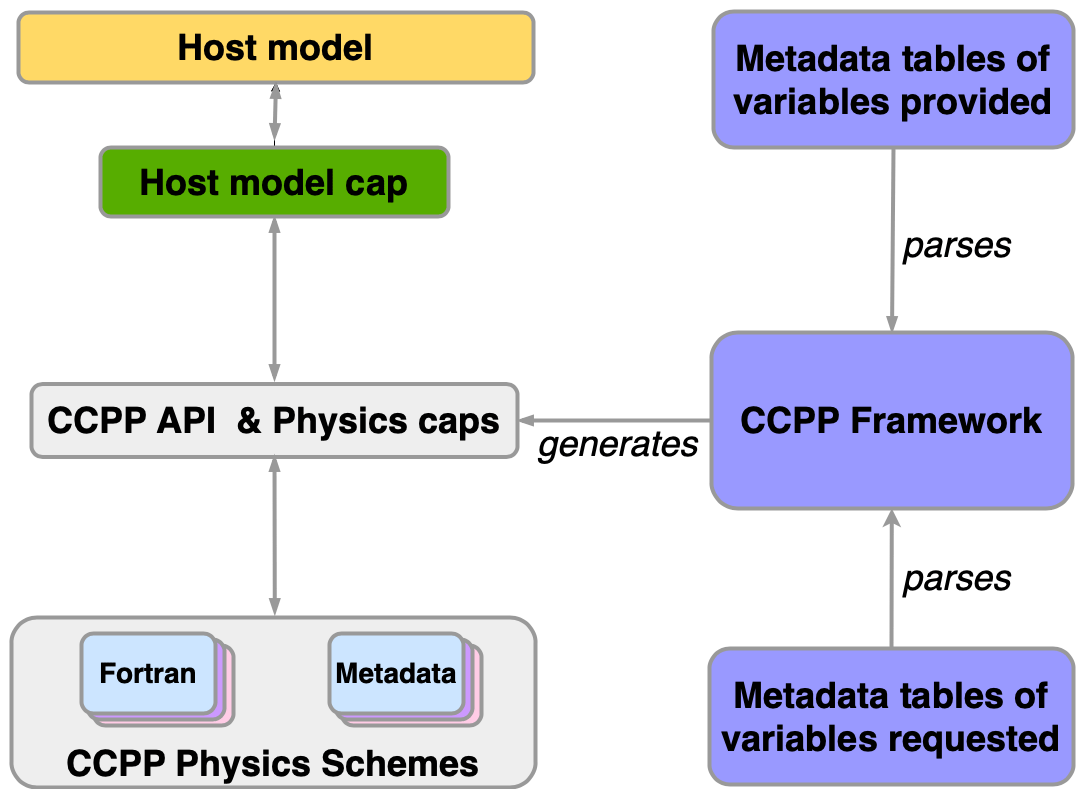
Figure 1Architecture of the CCPP and its connection to a host model. The CCPP Framework auto-generates the CCPP API and physics caps that connect the schemes in CCPP Physics with the host model through a host model cap/CCPP driver.
The CCPP Framework can be considered a data broker that only plays a role at model build time but is not part of the actual model executable. At build time, one or more SDFs are provided, and the Framework is invoked to check consistency between variables requested by and supplied to the physics and to auto-generate calling interfaces for each SDF (the physics and suite interface code, also referred to as caps). The Framework further auto-generates the application programming interface (API) that the host model calls to connect to the physics through a host model cap. At runtime, an SDF must be chosen to determine the suite that will be actually used in the run, which typically happens during the model configuration and initialization. Figure 1 shows the general architecture of a modeling system that employs the CCPP, and Sect. 3 provides details on the CCPP technical implementation.
While the original design and current use of the CCPP are centered on physics in atmospheric models, the system is general enough to be used in various host modeling systems, including complex coupled Earth system models, and for different types of processes. For instance, a coupled ocean–atmosphere–chemistry model could call the CCPP from the atmospheric component, the ocean component, and the chemistry component to execute atmospheric physics parameterizations, ocean physics parameterizations, and chemical processes, respectively. It should be noted that currently all CCPP-compliant physical parameterizations and all host models using CCPP are written in Fortran, which is traditionally the dominant programming language in NWP. The concept and design of the CCPP Framework do not preclude host models or schemes using other programming languages (e.g., C/C++), but currently these are not supported by the CCPP Framework. However, this was considered to be an advantage of the current CCPP Framework over alternative approaches that rely on native Fortran code files for declaring variables and types.
It should be noted that an early version of the CCPP Framework used a different approach. All available compliant physics schemes were compiled into a dynamic library that was linked to the executable at build time, without specifying an SDF. The SDF was parsed at runtime, and the schemes were called in the order specified in the SDF using a Fortran–C–Fortran interface, in which the C layer dynamically loaded (dlload) the scheme from the Fortran physics library. This dynamic approach had many disadvantages, for example that arguments were passed by reference from Fortran to C to Fortran space. Besides the poor computational performance, this approach made it much more difficult to debug the code, since developers were not able to “read” the code that gets executed at runtime and since important tools like debuggers were not able to detect errors. Further, operations as of today still require static executables for portability and debugging of crashes in production. The current design of the CCPP Framework enables compiler optimizations, compiler checks, debugging, “reading” of the final code that gets compiled into the executable, and static linking; delivers the necessary performance for operations; and presents a compromise between flexibility and performance by generating interfaces to multiple suites at the same time.
Designed as an infrastructure for connecting physical parameterizations to atmospheric models, the CCPP Framework requires a host model for both development and testing. The supported host models range from basic stubs that can be used to test the Framework itself to fully coupled three-dimensional Earth system models that contain multiple connections to the CCPP Physics through the auto-generated code from the CCPP Framework. This section describes in detail the implementation of the CCPP in two atmospheric host models, the CCPP SCM and the UFS, based on the design requirements outlined in Sect. 2. The two models are discussed in detail in Sect. 4.
3.1 Supported parallelism
Computational efficiency is an important aspect of the design of the CCPP. The system must deliver the necessary performance for operational applications while at the same time providing options for flexibility. The CCPP supports Message Passing Interface (MPI) task parallelism, OpenMP threading, and hybrid MPI–OpenMP parallelism. To accommodate the different requirements of physical parameterizations and host modeling systems, the implementation of the CCPP Framework and Physics is based on the two following paradigms:
-
Physics are column-based, and there can be no communication between neighboring columns in the physical parameterizations during the time integration phase (also referred to as time step execution or run phase).
-
The physics and time step initialization and finalization phases cannot be called by multiple threads in parallel.
With the above requirements in mind, the following limitations apply:
-
MPI communication is only allowed in the physics during the physics initialization, time step initialization, time step finalization, and physics finalization phases. The parameterizations must use the MPI communicator provided by the host model as an argument to the physics schemes.
-
The time integration (run) phase can be called by multiple threads in parallel. Threading inside the physics is allowed in every phase, but the parameterizations must use the number of available OpenMP threads provided by the host model as an argument. It is the responsibility of the host model to handle any synchronization of MPI tasks or threads.
3.2 CCPP phases
The CCPP Framework supports five phases in a model run, which are summarized in Table 1. The table further contains information on how blocked data structures are handled in the individual phases. With the exception of the time integration (run) phase, blocked data structures must be combined into contiguous data such that a physics scheme has access to all data that an MPI task owns. The need to have access to all data and the limitations on OpenMP threading described in the previous section are a result of potential file input/output (I/O) operations, computations of statistics such as minimum values of a variable, interpolation of lookup table data (e.g., ozone concentration from climatology), and global communication during those phases.
Table 1Supported phases during a model run. The third column contains information on how blocked data structures are handled in the different phases.

For better computational performance, NWP models often make use of parallel execution of the physics using multiple threads, in which each thread operates on a subset of the data owned by an MPI task. The exact implementation is model-dependent and can range from passing different start and end indices of a contiguous array to splitting up contiguous arrays into separate blocks. To support the latter case, the CCPP Framework is capable of combining blocked data structures into contiguous arrays in the auto-generated physics caps. The CCPP metadata play an important role in determining whether such operations are required, how the data need to be combined, and whether a variable needs to be skipped because it is inactive and may not be allocated or initialized properly (see Sect. 3.5 for details). Figure 2 and Listing 1 illustrate this capability. The combination of blocked data structures into contiguous arrays does not take into account the parallel decomposition of the data, since physical parameterizations in the CCPP are by definition one-dimensional, i.e., independent of the horizontal decomposition.
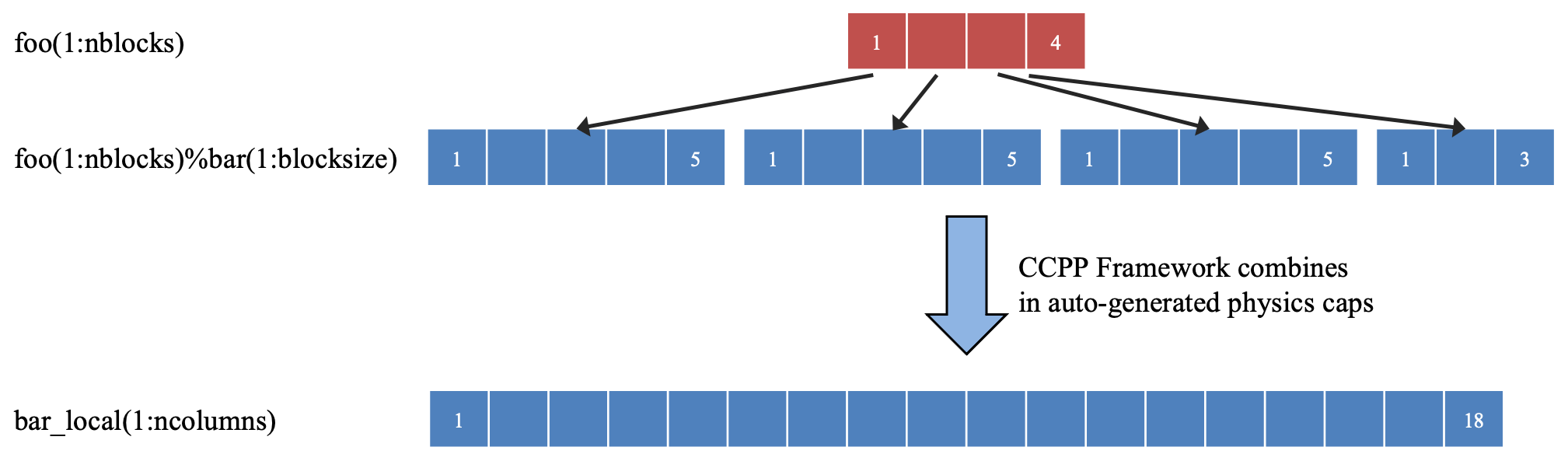
Figure 2The CCPP Framework automatically combines blocked data structures into contiguous arrays during certain phases of the physics calls, as shown here for the variable bar that is part of derived data type foo, which is split up into four blocks.
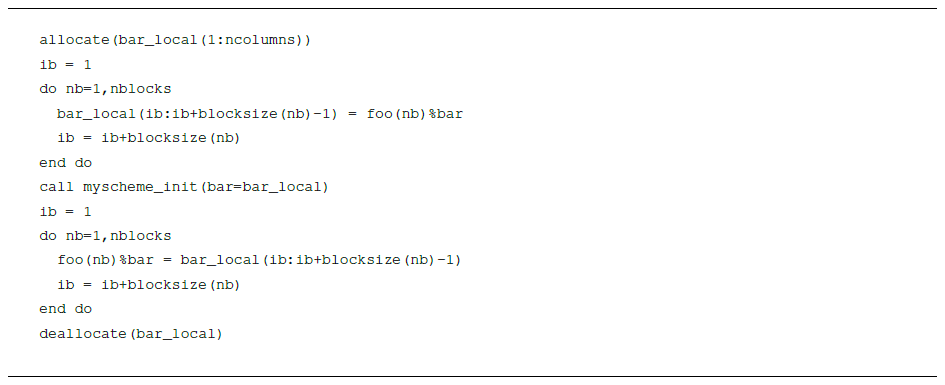
Listing 1Auto-generated code that combines the blocked data structure foo(:)%bar(…) from Fig. 2 into a contiguous array. Note that data copy operations are only applied if absolutely necessary, as in this case for converting blocked data into contiguous arrays, otherwise the host model variables are passed to the CCPP schemes directly.
3.3 CCPP-compliant schemes
CCPP-compliant parameterizations are Fortran modules with a number of requirements on formatting, naming, and coding standards and that are accompanied by a metadata file. The name of the Fortran source file should, but does not have to, match the name of the Fortran module, and the metadata file must match the name of the Fortran source file and carry the extension .meta. The Fortran module name defines the name of the CCPP scheme and of the entry point subroutines. For example, a Fortran module/scheme with the name myscheme can have up to five entry points, one for each of the CCPP phases, with the names myscheme_init, myscheme_timestep_init, etc. Each CCPP entry point must be preceded by CCPP metadata hooks that instruct the code generator to parse the associated metadata file for the metadata for the variables used in the argument list to the particular subroutine/entry point call. As mentioned earlier in Sect. 2, the concept and design of the CCPP Framework do not preclude host models or schemes using other programming languages, but currently all host models and all CCPP-compliant parameterizations are written in Fortran.
The full set of requirements for CCPP-compliant parameterizations is described in the CCPP technical documentation (Bernardet et al., 2022, Chapter 2). In brief, CCPP-compliant parameterizations should follow modern Fortran programming standards, be written in Fortran 90 free-form, use implicit none, avoid the use of goto statements, and use named end constructs for modules and subroutines to support the CCPP Framework parser. Neither Fortran common blocks nor the local definition or importing of physical constants or functions from other physical parameterizations is allowed. Physical constants must be passed to the physics schemes via the argument list. Each CCPP scheme may define its own dependencies (e.g., Fortran, C, C++ modules) that are required for the scheme, as long as these do not depend on the presence of other schemes and vice versa. One exception to this rule is the definition of floating point kinds, which are currently provided in the form of a Fortran module that resides in CCPP Physics and that can be imported by the physics schemes and the host model.
The restriction on Fortran common blocks has several reasons. First, a scheme must not share its data (variables, constants, types) with other schemes, and common blocks not only allow this but also make it difficult to detect violations of this requirement. Not sharing data with other schemes is to ensure that each scheme is self-contained and that at the same time all schemes use a consistent set of physical constants defined by the host model. Second, the requirement for CCPP schemes to be Fortran modules following modern programming standards essentially forbids using old Fortran 77 constructs such as common blocks. Third, Fortran common blocks are inherently dangerous because they permit the declaration of the same block differently in different procedures and evade proper type checking.
Each entry point that is in use (i.e., that is not empty) and that is preceded by CCPP metadata hooks must accept two mandatory variables that are used by the CCPP error handler: an error code and an error message. CCPP schemes are not allowed to stop the model execution, and writing to stdout and stderr is discouraged. In the event of an error, a scheme must set the error code to a non-zero value, assign a meaningful error message, and return control to the caller. Listing 2 presents a complete CCPP-compliant parameterization side by side with its metadata, which is discussed in detail in Sect. 3.5.1.
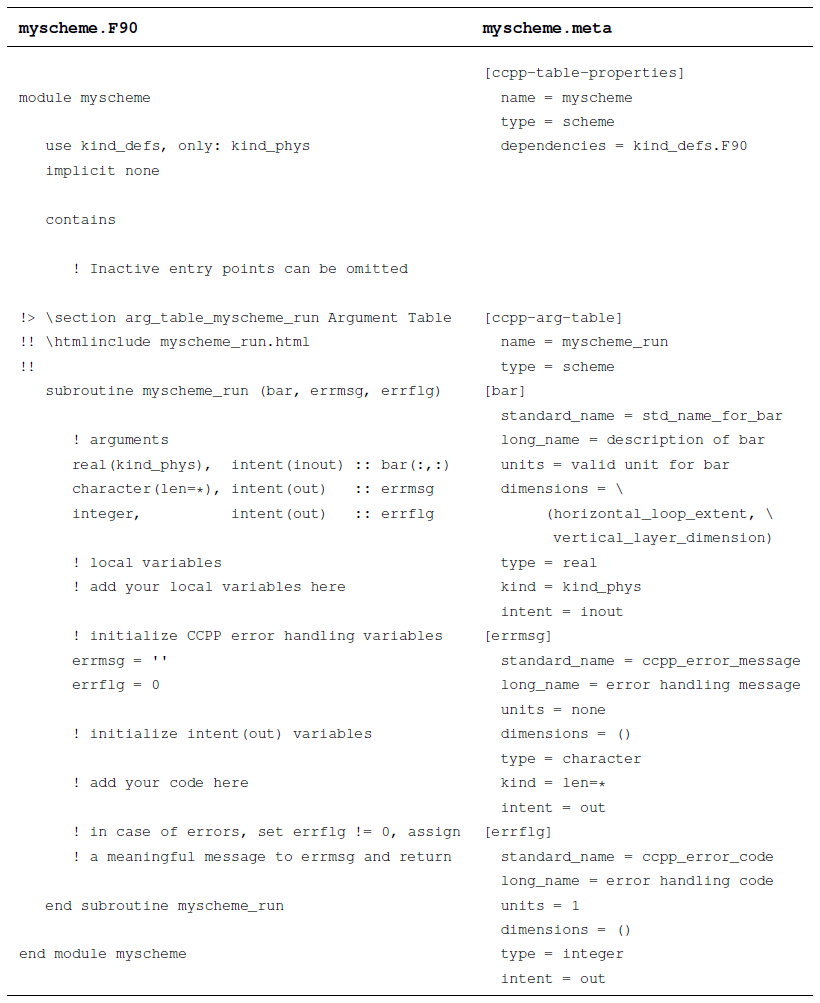
Listing 2A complete CCPP-compliant parameterization with Fortran source code (left) and corresponding metadata (right). Details for allowed metadata descriptions can be found in Bernardet et al. (2022, Chapter 2).
3.4 Host model variable definitions
The host model is responsible for declaring, allocating, initializing, and, if applicable, resetting all variables that are required to execute the physical parameterizations. Each variable passed to the physics must be a Fortran standard variable (real, integer, etc.) of rank zero or greater or a derived data type (DDT) that is defined by the receiving physical parameterization itself. DDTs defined by the host model cannot be passed to the physical parameterizations, as doing so would create a dependency of the CCPP Physics on a particular host model. However, the Fortran standard variables or physics DDTs can be constituents of host model DDTs, and they can be statically or dynamically allocated or pointers. Host model variables must be accessible from a module because the auto-generated CCPP API (see Sect. 3.7) imports the variables (in the case of Fortran standard variables) or the parent DDTs and passes them to the auto-generated physics caps. Listing provides an example of a host model Fortran module and metadata that define variables for use by the physics. The host model metadata are discussed further in Sect. 3.5.2.
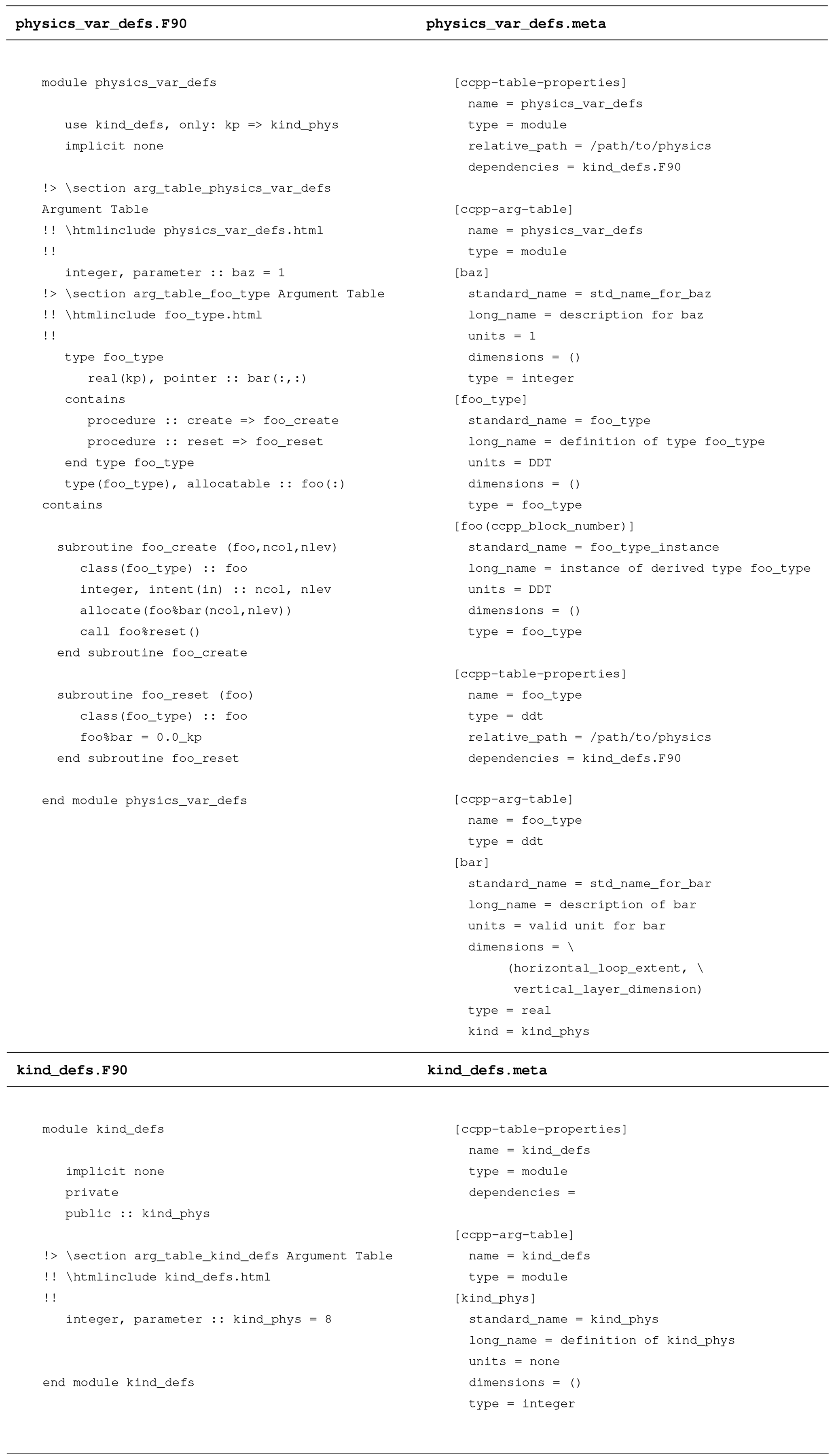
Listing 3Host model variable declaration and associated metadata. The definition of kind_phys is imported from the CCPP Physics, which contains kind_defs.F90 and kind_defs.meta. Details for allowed metadata descriptions can be found in Bernardet et al. (2022, Chapter 6).
Variables that are in use by the physical parameterizations selected for use at runtime (see Sect. 3.6) must be allocated and initialized by the host model. Depending on the choice of physics or their runtime configuration, variables may be left unallocated when being passed to the physical parameterizations. These variables are considered to be inactive and must have the corresponding metadata attribute active (see Sect. 3.5.3) set accordingly in the host model metadata so that the CCPP Framework skips any variable transformations that would lead to an invalid memory access. This mechanism was created to reduce the memory footprint of the application. A consequence of potentially unallocated host variables is that dummy argument variable arrays within schemes should be declared as assumed-shape to avoid compilation errors. Some variables need to be reset at certain times, such as accumulation “buckets” for diagnostics, and the host model is required to perform these actions. Likewise, the CCPP Framework does not provide a mechanism for writing diagnostics or restart data to disk; it is the responsibility of the host model to know which data to write to disk and when.
To ensure a consistent set of physical constants for use by all physical parameterizations, these constants must be defined by the host model and passed to the physics via the argument list; in other words, they are treated like normal variables. The host model in this case imports these kind/DDT definitions from the physics to allocate the necessary variables. In other words, while interoperability considerations preclude a dependence of the CCPP Physics on the host model, the need to manage the memory and initialization of variables in use by the physics creates a dependency of the host model on the CCPP Physics.
3.5 Metadata
The metadata are the essential pieces of information that allow the code generator (presented in Sect. 3.7) to connect the individual physics parameterizations to the host model. The implementation of the metadata follows a relaxed Python config-style format, except that a CCPP metadata file can contain the same keyword more than once. As mentioned before, the CCPP requires an associated metadata file for each scheme's Fortran source file containing the scheme entry points to be located in the same directory, with the same filename and extension (.meta). Similarly, for each Fortran source file on the physics and host model side that contains the kind, type, or variable definitions needed to run the CCPP Physics, a metadata file is required in the same directory, with the same filename and extension (.meta). The two different types of metadata are referred to as scheme metadata and host metadata and are described in detail in the following sections.
3.5.1 Scheme metadata
The role of metadata for CCPP-compliant schemes is to describe in detail the variables that are required to call a scheme for each of the phases described in Sect. 3.3. Each CCPP scheme has a set of metadata that consists of a header section [ccpp-table-properties] and individual sections labeled with [ccpp-arg-table], one for each phase in use, followed by a list of all variables and their attributes required to call the scheme phase. The header section must contain the name of the scheme and a type = scheme option that tells the CCPP that this is scheme metadata. It can also contain one or more dependencies = … options, and each of them can be a comma-separated list of dependencies for this scheme. A further relative_path option can be used to append a relative path to all dependencies listed in the header section.
Each [ccpp-arg-table] section repeats the type = scheme and lists the name of the CCPP entry point, which consists of the name of the scheme and the CCPP phase, connected by an underscore. Each variable is then described in a separate section with the local name of the variable as the section identifier; see Listing 2, right column, for an example. With the exception of the kind option, all attributes shown in Listing 2 for variable bar are mandatory. It is recommended, although not yet enforced, that the order of variables in the metadata file matches the argument list of the Fortran subroutine for ease of debugging.
3.5.2 Host model metadata
The host model metadata, as well as kind and type definitions in CCPP Physics, are used to define kinds, DDTs, and variables that are used by the host model to execute the chosen physics schemes. The host model variables and the scheme variables are paired by their standard names. The CCPP Framework code generator compares the variables provided by the host model against the variables requested by the physics schemes in the list of suites provided at compile time (see Sect. 3.7 for details). In the case of a mismatch, the Framework throws an error. Likewise, variables have to match in all their attributes except their local names (due to differing variable scopes), long names, and units (see Sect. 3.5.3).
The construction of metadata information in the host model is complicated by the fact that the metadata alone must provide the CCPP Framework code generator with enough information on where to find the variables required by the physical parameterizations. The metadata table in Listing illustrates this. While it is straightforward to declare Fortran standard variables on a module level (baz example in Listing ), a variable that is a constituent of a DDT requires a metadata table for the DDT and a definition and an instance of the DDT in the correct module metadata following the exact syntax in Listing . The DDT type foo_type in this example is used to store blocked data of a two-dimensional array bar and is defined and allocated in module physics_var_defs. Array bar is of the kind_phys kind, which is defined in and imported from CCPP Physics.

3.5.3 Variable attributes
Each variable is defined by a local name and a set of variable attributes. The local name can be different in each of the physics schemes and in the host model. The physics schemes and the host model share the following variable attributes:
standard_name-
The standard name is key for matching variables between the host model and a physics scheme. It must therefore be unique in the host model and within each scheme. To secure interoperability, the CCPP standard names are derived from a clear set of rules. These rules follow and extend the NetCDF Climate and Forecast (CF) metadata conventions (Hassell et al., 2017) and are defined in the CCPPStandardNames GitHub repository (Earth System Community Modeling Portal, 2022a). The repository also contains information about acronyms and units of variables, as well as a table with all standard names that are currently in use in any of the CCPP-compliant physics. Users developing new schemes or importing schemes into the CCPP must consult the existing standard names before creating new standard names.
long_name-
The long name contains a brief description of the variable. This can be used to further clarify the purpose of this variable. The long name can be different in each of the physics schemes and the host model to provide the necessary clarification in the given context.
units-
The variable units must follow the definitions in the UDUNITS package (Unidata, 2022). If a host model variable and a physics variable matched by their standard name differ in their units, the CCPP Framework is capable of performing automatic unit conversions in the auto-generated physics caps. Unit conversions are implemented in the CCPP Framework code generation scripts. An error will be thrown when running the CCPP Framework in the code generation step if a particular unit conversion is requested but not implemented. In the event of such an error, one may define the appropriate unit conversion in the CCPP Framework or otherwise manually write conversions in the scheme's code to ensure unit consistency. Figure 3 provides an example of an automatic unit conversion for cloud effective radii between a host model (using micrometer, µm) and a physics scheme (using meter, m]).
dimensions-
The dimensions of a variable are listed in the form of CCPP standard names and are explained further in Sect. 3.5.4. The variable's dimensions must be the same for the host model and the physics schemes. The only exceptions are
horizontal_dimensionandhorizontal_loop_extent, depending on the CCPP phase and whether blocked data structures are used (see Sect. 3.5.4 for details). type-
The type of a variable can be either a Fortran standard type (
integer,real,logical,complex,character) or a DDT (ddt). The use of DDTs in a physics scheme is possible as long as the DDT itself is defined in the physics scheme, not in the host model. The type of a variable must be the same for the host models and the physics scheme. kind-
This is an optional attribute that is only required for Fortran variables that use a kind specifier. The kind of a variable must match between the host model and the schemes.
Variable metadata for physics schemes in addition contain an intent attribute, which is identical to the definition in Fortran (in, inout, out). It is important to use the correct value for this attribute because the CCPP Framework may omit certain variable transformations in the auto-generated caps based on its value. For example, if a variable is declared as intent = in, automatic unit conversions will only be performed on the temporary variable before entering the scheme, and the reverse operation after returning from the scheme will be omitted. Likewise, for a variable declared as intent = out, the temporary variable for combining blocked data structures will be allocated but left uninitialized before entering the physics scheme since the scheme is expected to overwrite the contents of this variable completely. The intent information is also used by the variable tracker described in Sect. 3.7.
The host model metadata have the additional, optional attribute active, which contains a Fortran logical condition expressed in CCPP standard names that describes whether a variable is allocated or not. The default value is .true., which means that the variable is always allocated. If a variable is inactive, the auto-generated code will skip any operation on the variable in the auto-generated caps (e.g., unit conversions). Listing 4 contains examples for a variable defined in a host model and in a physics scheme.
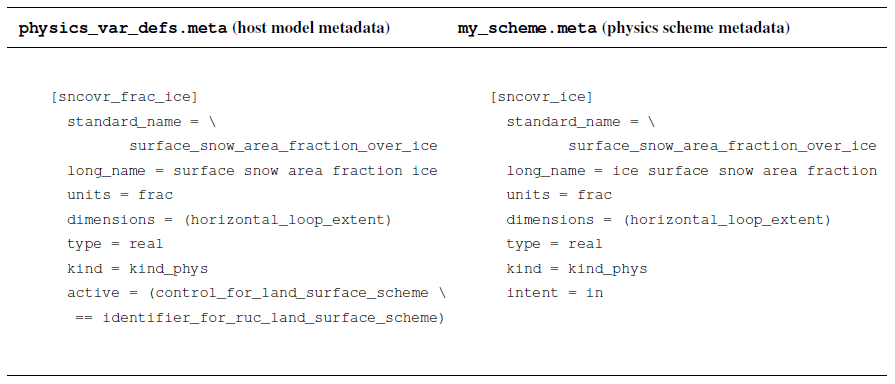
Listing 4Metadata for variable surface_snow_area_fraction_over_ice in the host model and a physics scheme.
3.5.4 Variable dimensions
Variable dimensions can be coordinate dimensions or indices. An example for an index dimension is a particular tracer in an array of tracers. For performance reasons, the index dimensions for tracer arrays are typically the outermost (i.e., rightmost) dimension in Fortran. Individual tracers can then be passed efficiently to physics schemes as a contiguous slice of the tracer array in memory. Coordinate dimensions for CCPP physics schemes consist of one horizontal dimension and one vertical dimension, with the convention that the horizontal dimension is the innermost (i.e., leftmost) dimension in Fortran.
The choice of only one horizontal dimension was made because many modern host models use unstructured or irregular meshes and because any two horizontal dimensions can be passed to physics schemes using one horizontal dimension only, as long as the horizontal dimensions are the innermost (i.e., leftmost) dimensions for both the host model and the physics schemes. Further, the choice of the horizontal dimension being the innermost dimension was made because the majority of numerical weather prediction models and physical parameterizations are designed for execution on traditional central processing units (CPUs). In recent years, graphical processing units (GPUs) have become increasingly popular but typically require reordering of arrays (i.e., making the vertical dimension the first dimension) for better computational performance. It should be noted that the CCPP Framework does not yet support automatic array transformations to accommodate host models that use the vertical dimension as the innermost dimension. For such a host model, a manually written host model cap or interstitial scheme is required to transform all arrays before entering and after returning from the physical parameterization. Work is underway to implement automatic array transformations in a future version of the CCPP Framework. The CCPP standard names for vertical dimensions distinguish between layers (full levels), where vertical_layer_dimension is used, and interfaces (half levels), where vertical_interface_dimension is used. Additional qualifiers can be appended, for example as in vertical_interface_dimension_for_radiation.
The host model must define two variables to represent the horizontal dimension in the metadata. The variable with the standard name horizontal_dimension corresponds to all columns that an MPI task owns (or simply all horizontal columns when no MPI parallelism is used). The variable with the standard name horizontal_loop_extent corresponds to the size of the chunk of data that are sent to the physics in the run phase (see Sect. 3.2). In the simplest example, the host model passes all horizontal columns of an MPI task at once, and the variables horizontal_dimension and horizontal_loop_extent are identical. The more complicated scenario is illustrated in Listing , where the host model defines a vector foo of type foo_type that contains blocks of a two-dimensional array bar. In the run phase, the physical parameterizations are called for one block at a time (although possibly in parallel using OpenMP threading). Here, horizontal_loop_extent corresponds to the block size, and the sum of all block sizes equals horizontal_dimension. In either of these cases, the convention is to use horizontal_loop_extent as the correct horizontal dimension for host model variables.
The CCPP physics schemes have no knowledge about the storage scheme of the host model or about how many horizontal columns are passed. The correct standard name in the scheme metadata depends on the CCPP phase. As discussed in Sect. 3.2, all phases except the run phase expect all of the data that an MPI task owns. The correct standard name for the horizontal dimension in the init, timestep_init, timestep_finalize, and finalize phases is thus horizontal_dimension. For the run phase, the correct standard name is horizontal_loop_extent. Thus, the same variable must use a different standard name in its horizontal dimension attribute depending on the CCPP phase.
These rules may sound confusing at first, but they allow the CCPP Framework to handle different strategies for memory allocation and thread parallelism while securing interoperability and being able to reliably catch errors in the metadata.
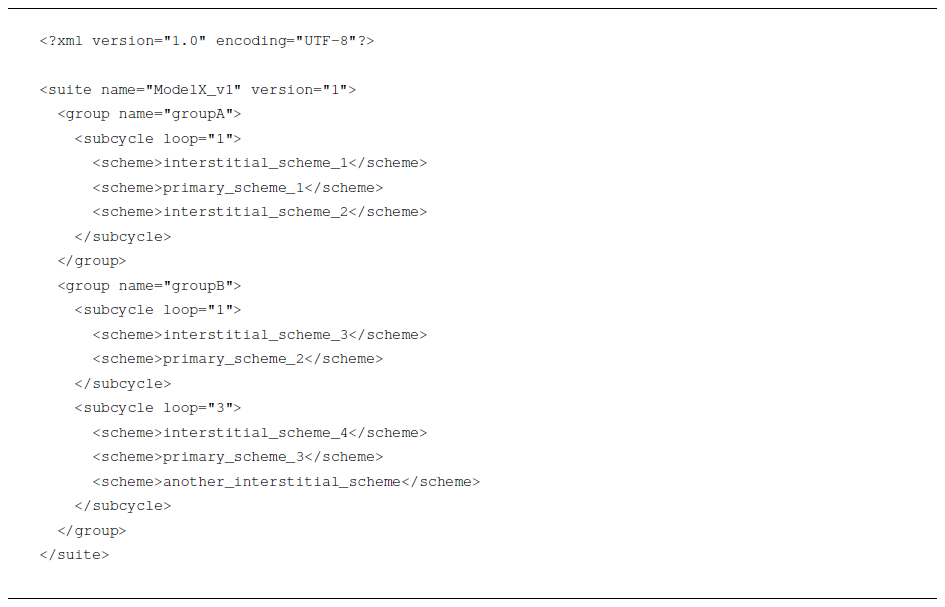
3.6 Suite definition file
The purpose of a CCPP SDF is to describe which physical parameterizations are called in which order for a given model run. SDFs are written in XML format and contain one or more groups of schemes. Within each group, subsets of schemes can be called more than once using subcycles, described earlier in Sect. 2. Listing 5 shows an example of a simple SDF that contains two groups, groupA and groupB. In groupB, the first set of schemes is called once per time step, whereas the second set is called three times in a loop. While in reality the names of the schemes are more descriptive (e. g., gfdl_microphysics or mynn_pbl), the notation in Listing 5 hints at a fundamental difference between traditional physics packages and the CCPP. In the former, the physics driver plays a central role in connecting the various physical parameterizations and presenting them to the host model as one entity. These physics drivers are written by hand and are often many thousand lines long. They contain a large amount of glue code, which we refer to as interstitial code, that prepares, converts, or transforms variables as well as computes diagnostics, among other things. In the case of the CCPP, the driver is a simple host model cap that contains a handful of calls to a standardized, auto-generated CCPP API, which in turn calls the auto-generated physics caps. While the CCPP Framework is capable of performing certain automatic conversions, such as unit conversions, the majority of the code that in traditional physics packages resides in the physics drivers must be placed in CCPP schemes. These schemes are referred to as interstitial schemes, as opposed to primary schemes (microphysics, planetary boundary layer, etc.). Both types of schemes are written and used in the same way. Future functionality added to the CCPP Framework may remove the need for interstitial schemes as the Framework matures. Minimization of such schemes is desirable for simplicity and true interoperability of physical parameterizations, since they are often tied to a specific host (i.e., “leftover” glue code from a host's previous hand-coded physics driver).
3.7 Code generator
The heart of the CCPP Framework is the code generator, which, at build time, auto-generates the CCPP API and the physics caps from the metadata. The code generator consists of Python scripts, with ccpp_prebuild.py being the main program that gets called by the host model before or as part of the build process. The code generator expects one mandatory argument, a configuration file ccpp_prebuild_config.py. This file is host-model-dependent; resides with the host model code; and contains information on where to find physics schemes (i. e., depending on where the CCPP Physics code is located within a host's directory structure), kind, type, variable definitions, etc. The code generator can produce caps for one or more CCPP physics suites simultaneously if a list of suites (which is translated internally into a list of suite definition filenames) is passed as a command-line argument to ccpp_prebuild.py (if omitted, all available suites are used).
In addition to the API and the caps, the code generator also produces information for the build system in the form of CMake and GNU Make include files or shell scripts. These contain lists of files that the host model build system must compile to execute the physical parameterizations in the specified suites: kind, type, and variable definitions; physics schemes; and all auto-generated files. The code generator further produces two files to aid development efforts: an HTML document containing a list of all variables defined by the host model and a LaTeX document containing a list of variables used by any of the physics schemes in any of the selected suites. Figure 4 contains a flowchart of the ccpp_prebuild.py code generator with its inputs and outputs.

Figure 4Flowchart of the CCPP Framework code generator ccpp_prebuild.py with its inputs and outputs.
The auto-generated caps contain the minimum code necessary to execute the physics schemes in each specified SDF. It includes calling the physical parameterizations as well as the various variable manipulations mentioned earlier, namely automatic unit conversions and deblocking of blocked data structures. These transformations may be skipped, depending on whether a variable is active or on the variable intent (see Sect. 3.5.3). In addition, to aid development and debugging efforts, the Framework can insert tests for variable allocations, size, and dimensionality into the auto-generated caps. This feature is activated by passing --debug to ccpp_prebuild.py. Depending on the host model build system and the configuration in ccpp_prebuild_config.py, the main program ccpp_prebuild.py is called from a specific directory, in source or out of source, in the build tree. The command-line argument --verbose can be used to increase the logging output from the code generator.
Two additional utilities are included in the CCPP Framework: the script metadata2html.py converts scheme metadata, inline documentation in Doxygen format, and additional documentation into a complete scientific documentation for CCPP Physics. This script is generally called from the same location as ccpp_prebuild.py and can be run either in batch mode to process all schemes or individually for each scheme. For an example, see the scientific documentation for CCPP v6 (Zhang et al., 2022).
Lastly, the script ccpp_track_variables.py tracks the flow of a variable through a CCPP suite. This utility is useful for understanding a variable's use within a suite and aims at reducing development and debugging efforts. The CCPP technical documentation (Bernardet et al., 2022) provides more information on its use.
3.8 Host model integration
The basic integration of the CCPP in a host model is shown in Fig. 1. A host model cap is used to separate the entry points to the CCPP Physics and the error handling from the other host model logic. The entry points to the CCPP Physics are defined in the auto-generated CCPP API and are Fortran subroutines with a simple, standardized interface:
The first argument, ccpp_data, is of type ccpp_t, which is provided by the CCPP Framework in the ccpp_types module. This DDT is used to pass information on block number, thread number, and subcycling to the auto-generated caps. It also contains the CCPP error handling variables in the form of an error code and an error message. The ccpp_data variable is typically a module variable in the host model cap. For more complicated models that use blocked data structures and OpenMP threading to process blocks of data in parallel in the run phase, there can be multiple ccpp_data variables (see Sect. 4.2).
The host model is responsible for initializing ccpp_data before initializing the CCPP Physics using ccpp_physics_init and for setting the block and thread number before any of the calls into the CCPP API. Upon returning from the physics, the host model must handle any errors in the physics by inspecting the ierr variable. For example, a value other than zero indicates an error, and the host model can print the error flag and error message from ccpp_data before gracefully stopping the model.
The suite_name argument to ccpp_physics_PHASE is mandatory and switches between one or more suites that were compiled into the executable. The group_name argument is optional and can be used to call the physics phase PHASE for a particular group only. If omitted, phase PHASE is executed for all groups in the order specified in the SDF. As mentioned earlier, subcycling of schemes when so defined in the SDF (<subcycle loop="N"> with N>1) only happens in the run phase; for all other phases N is set to 1. Examples for simple and more complex host model caps are described in Sect. 4.
4.1 CCPP Single Column Model
The CCPP SCM simulates the time evolution of the state of the atmosphere over a one-dimensional vertical column extending from the Earth's surface upwards. Lower boundary conditions, such as fluxes of heat and moisture, are obtained from pre-generated datasets or from the land surface, ocean, and sea ice parameterizations. Lateral boundary conditions are obtained from forcing datasets originating from field campaigns, three-dimensional models, or a combination of both. The feature that distinguishes the CCPP SCM from other SCMs is that it is CCPP-compliant, that is, it contains a CCPP host model cap that allows it to be used with the CCPP Physics.
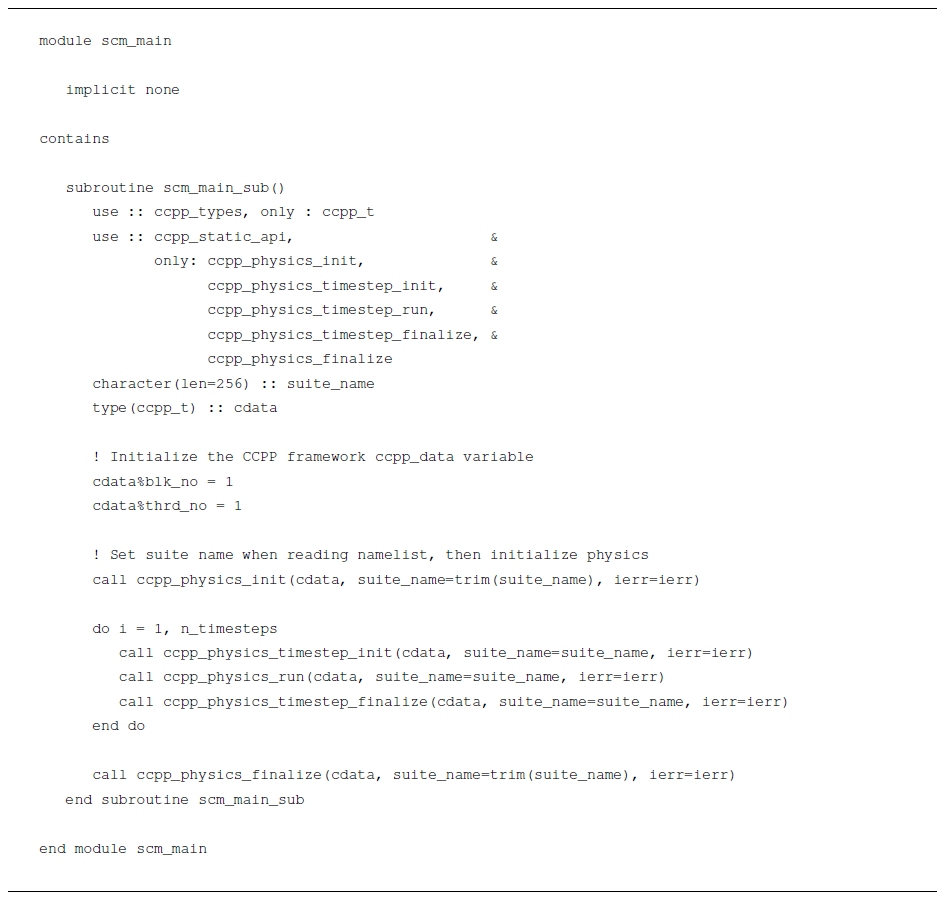
The integration of the CCPP in the SCM is simple and can serve as a template for implementations in other host models. Listing A1 in the Appendix contains a simplified version of the CCPP implemented in the SCM. In this basic setup, all data are stored contiguously, and no threading is used. In each CCPP phase, the physics are called for all groups in the order listed in the SDF.
The CCPP SCM v6 supports 6 physical suites (that is, 6 SDFs) that invoke a total of 23 physical schemes from the CCPP Physics. These suites were assembled to support hierarchical testing and development to support research and forecast requirements in short- and medium-range weather.
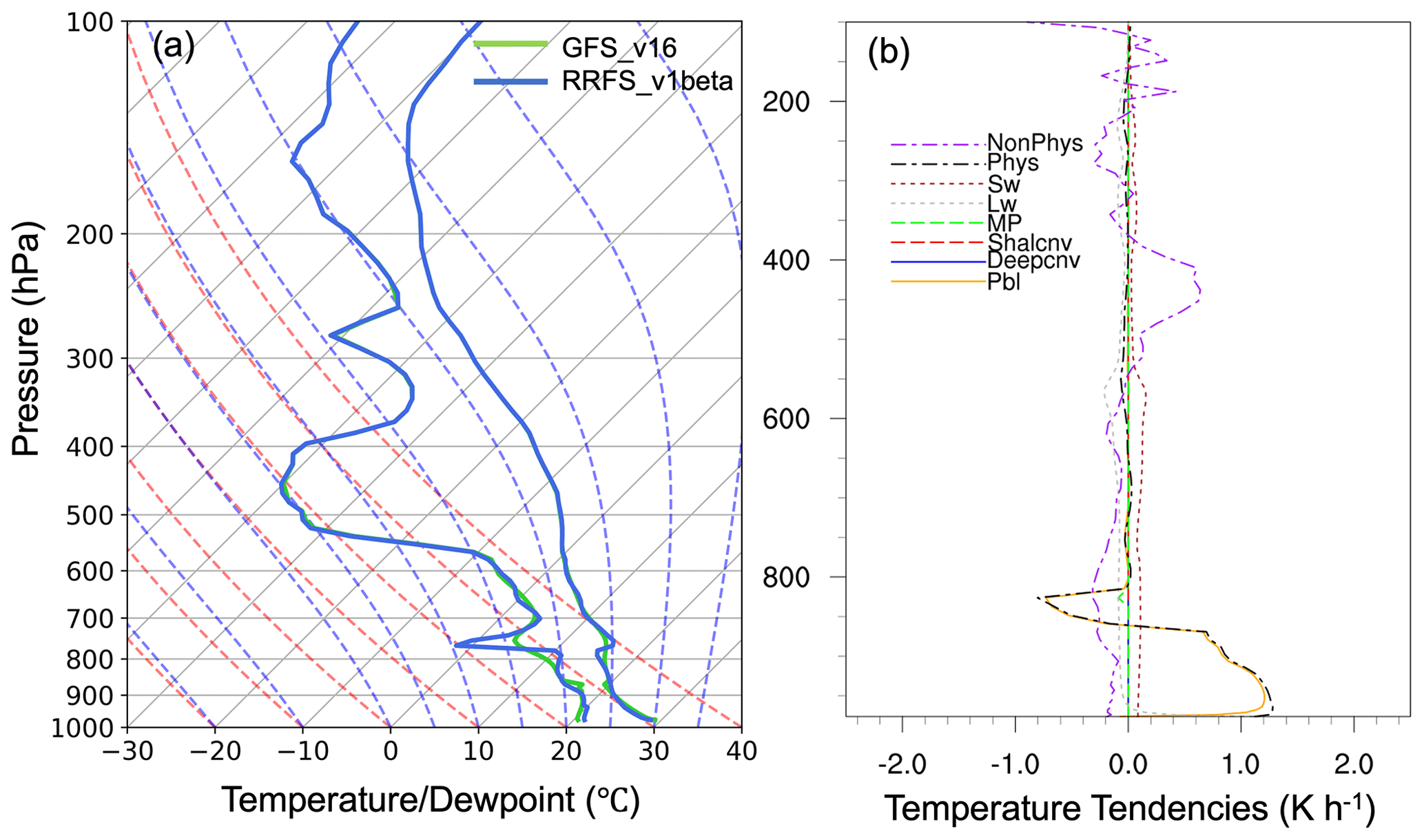
Figure 5(a) Skew-T log-P plot for SCM runs with physics suites GFS v16 (GFS_v16) and RRFS v1beta (RRFS_v1beta), initialized at 00:00 UTC on 23 July 2020 at the Atmospheric Radiation Measurement Southern Great Plain central facility site (36.61∘ N, 97.49∘ W) and valid at forecast hour 15. (b) Tendencies from the GFS v16 physics suite valid at the same time for the different contributing processes (Pbl: planetary boundary layer; Deepcnv/Shalcnv: deep/shallow convection; MP: microphysics; Lw/Sw: longwave/shortwave radiation; Phys: all physics tendencies; NonPhys: non-physics tendencies, e.g., dycore/advection).
Figure 5 shows an example for SCM runs using two different physics suites for the 2020 Low Summertime CAPE case from the UFS Case Studies Catalog (Sun et al., 2021). The figure also illustrates the CCPP capability to output diagnostic tendencies for the contributing physical processes, a critical tool to develop and improve the physical parameterizations in the CCPP.
4.2 Unified Forecast System
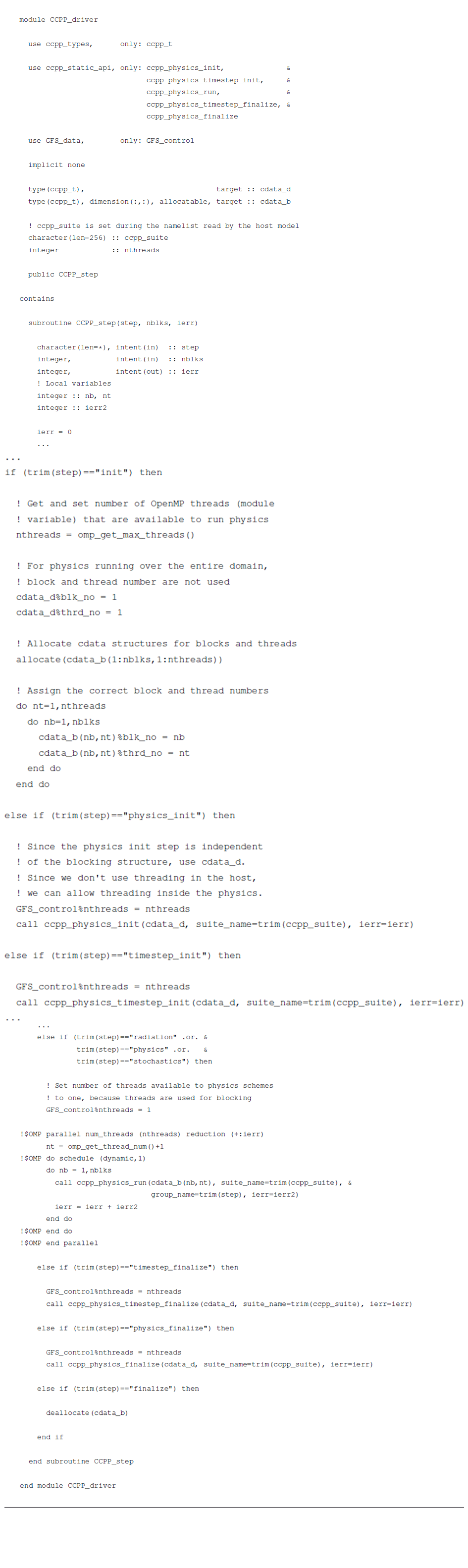
The UFS is an example of a complex Earth system model that calls the CCPP from the atmospheric model through the host model cap and optionally from within the Finite-Volume Cubed-Sphere (FV3) dynamical core. Since in the UFS the dynamics time step is shorter than the general physics time step, we refer to the physics called from the dynamical core as tightly coupled or fast physics, as opposed to the traditional or slow physics that are called through the atmospheric host model. The fast physics currently consist of a single scheme, the saturation adjustment step for the GFDL cloud microphysics (Zhou et al., 2019). The UFS uses the capability to call individual groups of physics from the SDF to implement the slow and fast physics and perform other operations between the calls to radiation, stochastic physics, and the remaining slow physics. The schematic diagram of the UFS in Fig. 6 illustrates this complexity. The UFS also uses blocked data structures to execute the time integration (run) phase in parallel using multiple OpenMP threads. Listing in the Appendix contains an abstraction of the host model cap in the UFS, called CCPP_driver.F90, which is notably more complicated than the simple host model cap for the CCPP SCM (Listing A1).

Recently, the capability to call aerosol chemistry parameterizations as part of the physics was added to the UFS (Barnes et al., 2022). The CCPP Framework has also been connected to the Community Mediator for Earth Prediction System (CMEPS; Earth System Community Modeling Portal, 2022b) to enable the computation of thermodynamic fluxes between the atmosphere and the underlying ocean and sea ice using a predefined grid to exchange information among the various component models (Ufuk Turuncoglu, NCAR, personal communication, 2022). Both developments were recently merged into the official code repository and are omitted in Fig. 6.
The CCPP has been included as a subcomponent of all UFS public releases thus far, with the most recent one being the UFS SRW App v2 (UFS Community, 2022). The SRW App is a UFS configuration intended for research and operational applications on temporal scales of hours to a few days. The SRW App v2 supports simulations with four physics suites, which invoke a total of 21 CCPP schemes. One of the suites is a baseline configuration representing the physics used in the currently operational GFS v16, while the other three suites represent physics permutations with potential for inclusion in the upcoming operational implementation of the RRFS v1beta, a multi-physics convection-allowing ensemble, at the NOAA. To illustrate the use of the CCPP in the UFS SRW App over the contiguous United States, Fig. 7 shows precipitation forecasts produced with the GFS v16 suite (which invokes a microphysics parameterization with saturation adjustment called from the dynamical core) and the RRFS v1beta suite, which involves a different microphysics scheme that does not have a tightly coupled component in the dynamical core. The two forecasts have notable similarities, as both indicate severe thunderstorms with associated damaging winds, large hail, and heavy rainfall developing across portions of Iowa, Missouri, and Illinois in the evening of 15 June. However, the location of heavy rainfall differs between the forecasts. The ability of the CCPP-enabled UFS to readily use multiple suites to create diverse forecasts enables experimentation for investigative research and for ensemble forecasting.
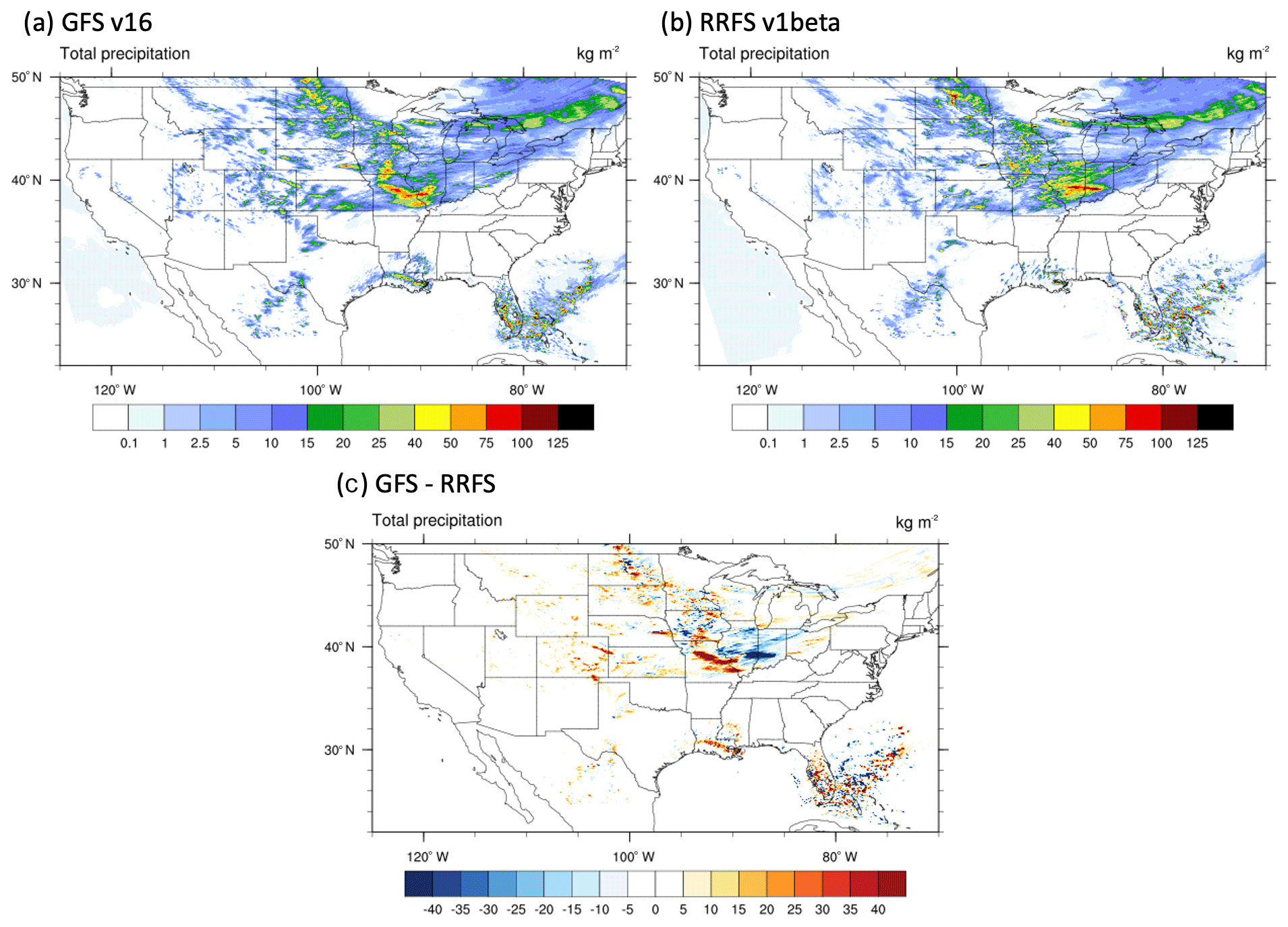
Figure 7UFS SRW App v2 3 km forecasts of 24 h accumulated precipitation (kg m−2≙mm) initialized at 00:00 UTC on 15 June 2019, and valid at 00:00 UTC on 16 June 2019, created with the (a) GFS v16 suite and (b) RRFS v1beta suite. The difference between the two forecasts is shown in panel (c).
The CCPP Framework and Physics are designed to increase the interoperability of physical parameterizations and host modeling systems. The system relies on standardization, metadata information, clear documentation, and constraints on the format of the Fortran source code to automatically generate the interfaces that connect the parameterizations and the host model. The simple yet clear metadata standard builds on established efforts such as the CF metadata conventions and the UDUNITS package. The need to define metadata, follow coding standards, and provide clear documentation are additional efforts that developers of parameterizations and host models have to make compared to traditional, hard-coded physics drivers. However, the ability to add new parameterizations, transfer them between models, and connect them with other parameterizations without having to rewrite the code or make assumptions on units or dimensions outweighs the costs. The CCPP is also computationally performant: while traditional physics drivers contain a lot of code branching to switch between different parameterizations of one type, the auto-generated physics suite caps benefit from knowing at compile time which parameterizations are called and in which order and therefore require no code branching.
Modern NWP systems have vastly different technical requirements and use different ways to call physical parameterizations, such as time-split versus process-split steps, where in the former a scheme updates a state before the next scheme is called, and in the latter multiple schemes operate on the same state before the combined tendencies are applied to update the state. The CCPP Framework currently has no explicit support for time-step (sequential) versus process-split (parallel) execution. However, both host models presented in Sect. 4 make use of time-split and process-split physics. This is realized such that time-split schemes ingest a model state (in the form of several state variables), which they update in place. Process-split schemes ingest an input state and tendencies and return updated tendencies. Work is underway to provide full support for time-split and process-split schemes.
The ability of the CCPP Framework to call schemes multiple times using subcycling and to call groups of schemes from different places in the model allows host models to use implicit solvers and other higher-accuracy methods, with one example being to call the saturation adjustment for the GFDL microphysics scheme directly from the FV3 dynamical core within the fast, acoustic loop. The grouping of schemes also allows host models to implement super-parameterizations (Randall et al., 2013), i.e., the ability to call selected schemes with a higher-resolution grid than others, or piggybacking methods, i.e., “to run a single simulation applying two microphysical schemes, the first scheme driving the simulation and the second piggybacking this simulated flow” (Sarkadi et al., 2022).
Since its inception in 2017, the CCPP has been integrated into several modeling systems: CCPP-SCM, UFS, the Navy's next-generation NEPTUNE model, NCAR's MUSICA infrastructure for chemistry and aerosols, and recently also in an experimental version of NASA's Goddard Earth Observing System (GEOS; Bill Putman, NASA, personal communication, 2022). The CCPP Physics has received contributions from the wider community and contains more than 30 parameterizations of physical processes. A multi-institutional CCPP Physics code management committee has been established to provide governance and guidance on developing, testing, and integrating new parameterizations. The CCPP Framework development, which until now has been concentrated on a small group of developers from the DTC with input from several NCAR and NOAA laboratories, is being broadened. To further enhance the capabilities of the CCPP Framework and enable its use in additional modeling systems, NOAA and NCAR in 2019 agreed on a joint development effort as part of a wider memorandum of agreement on common infrastructure elements of Earth modeling systems (UCAR-NCAR et al., 2019). As part of this effort, work is underway to make the NCAR flagship modeling systems Community Atmosphere Model (CAM; a component of the Community Earth System Model) and MPAS CCPP-compliant and to extend the CCPP Framework code generator to satisfy the needs of the growing number of systems it will support.
While the CCPP has reached maturity and is on track to transition to operational implementations of the UFS at the NOAA in 2023, it is crucial to look ahead and identify developments needed to meet future requirements. An important aspect of the future development of the CCPP is leveraging emerging technologies, such as using hardware accelerators (GPU, FPGA, etc.) and modern processor vectorization capabilities (see Zhang et al., 2020, for an example). As physical parameterizations are augmented to run efficiently on such systems, the CCPP Framework must support these developments in the auto-generated caps by reducing the data movement and transforming the data to benefit from the increased parallelism and vector processing. Scientific innovations, such as machine learning and the move towards three-dimensional physical parameterizations, also need to be considered in future development. Machine learning and artificial intelligence are promising candidates for improving the accuracy of parameterizations and/or significantly reducing the computational costs (see Irrgang et al., 2021, for a review). These technologies make heavy use of Python libraries such as scikit-learn, which aligns well with the fact that the CCPP Framework code generator is written entirely in Python and relies on clearly defined metadata and standardized interfaces. The use of Python in the CCPP Framework is also compatible with efforts to provide simpler, domain-specific interfaces to the complex codes used in Earth system models (McGibbon et al., 2021).
Unlike the CCPP Physics, the CCPP Framework to date has received few contributions from the community. This is expected to change as the CCPP is implemented in more host modeling systems for research and operations and has additional public releases. Because the Framework automatically generates the interfaces between the physical parameterizations and the host model, is written in Python, and builds on a clearly defined metadata standard, there are ample opportunities for improvements and new capabilities. Examples are tools that depict the flow of a variable through a physics suite (recently developed at the DTC), improved diagnostic capabilities, automated saving of restart information, and many more. For both the Framework and the Physics, the CCPP developers welcome contributions from the community via the open-source development repository hosted on GitHub (https://github.com/NCAR/ccpp-framework, last access: 23 April 2023, and https://github.com/NCAR/ccpp-physics, last access: 23 April 2023).
The Common Community Physics Package (CCPP) Single Column Model v6.0.0 (with Physics and Framework) are available for download as a single .tar.gz file at https://doi.org/10.5281/zenodo.6896438 (Firl et al., 2022). The associated technical documentation is available for download at https://doi.org/10.5281/zenodo.6780447 (Bernardet et al., 2022).
Copyright 2022, NOAA, UCAR/NCAR, CU/CIRES, CSU/CIRA. Licensed under the Apache License, Version 2.0 (the “License”). You may obtain a copy of the License at http://www.apache.org/licenses/LICENSE-2.0 (last access: 23 April 2023). Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on an “as is” basis, without warranties or conditions of any kind, either express or implied. See the License for the specific language governing permissions and limitations under the License.
The input data for the 2020 Low Summertime CAPE case used for the CCPP SCM comparison in Sect. 4.1 were taken from the UFS Case Studies Catalog (Sun et al., 2021). The input data and UFS model code for the UFS comparison in Sect. 4.2 were obtained from the UFS SRW App v2.1 release (UFS Community, 2022).
DH developed the CCPP Framework, ported physical parameterizations to CCPP Physics, integrated the CCPP in the UFS, assisted the Naval Research Lab (NRL) with the integration of the CCPP in NEPTUNE, and led the CCPP code management until the end of 2021. LB led the CCPP project, performed project management duties, and oversaw the development of the CCPP Framework and Physics and associated documentation. GF assisted with the CCPP Framework development, led the technical development of the CCPP Physics library, and integrated the CCPP in the SCM and has led the CCPP code management since 2022. MZ ported physical parameterizations to CCPP Physics and was the main developer of the CCPP scientific documentation. XS contributed to the testing of the CCPP within the UFS Case Studies project, and ME acted as co-lead for the CCPP project. DH and LB created this paper; GF, MZ, and XS contributed to the graphics. All authors reviewed the manuscript.
The contact author has declared that none of the authors has any competing interests.
Publisher’s note: Copernicus Publications remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
The authors would like to acknowledge the invaluable contributions made by Timothy Brown (then of CU/CIRES at NOAA/GSL) and David Gill (then at NCAR) to early versions of the CCPP. Further acknowledged are Laurie Carson (then at NCAR), Julie Schramm (then at NCAR), Samual Trahan (CU/CIRES at NOAA/GSL), Mike Kavulich (NCAR), and Weiwei Li (NCAR) for their contributions to the CCPP physics and documentation. The authors would also like to thank Steve Goldhaber (NCAR), Cheryl Craig (NCAR), and Francis Vitt (NCAR) for their valuable input into the CCPP Framework development and Duane Rosenberg (NOAA/GSL) for reviewing this paper. Lastly, the developers at NOAA EMC, NOAA GSL, NOAA GFDL, and the Naval Research Lab are acknowledged for their constructive feedback that led to a better design of the CCPP.
This work is supported by the UFS Research-to-Operation (UFS-R2O) project, sponsored by the National Weather Service Office of Science and Technology, Integration Modeling Program Division, and the NOAA Oceanic and Atmospheric Research Weather Program Office.
This paper was edited by Olivier Marti and reviewed by Li Liu and one anonymous referee.
Ahmadov, R., Grell, G., James, E., Csiszar, I., Tsidulko, M., Pierce, B., McKeen, S., Benjamin, S., Alexander, C., Pereira, G., Freitas, S., and Goldberg, M.: Using VIIRS fire radiative power data to simulate biomass burning emissions, plume rise and smoke transport in a real-time air quality modeling system, in: 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), 2806–2808, IEEE, 23–28 July 2017, Fort Worth, TX, https://doi.org/10.1109/IGARSS.2017.8127581, 2017. a
American Meteorological Society: Parameterization, Glossary of Meteorology 2022, https://glossary.ametsoc.org/wiki/Parameterization (last access: 23 April 2023), 2022. a
Barnes, H. C., Grell, G., Freitas, S., Li, H., Henderson, J., and Sun, S.: Aerosol Impacts for Convective Parameterizations: Recent Changes to Grell-Freitas Convective Parameterization, AMS, https://ams.confex.com/ams/102ANNUAL/meetingapp.cgi/Paper/391989 (last access: 23 April 2023), 2022. a
Bauer, P., Thorpe, A., and Brunet, G.: The quiet revolution of numerical weather prediction, Nature, 525, 47–55, https://doi.org/10.1038/nature14956, 2015. a
Bernardet, L. R., Kavulich, M., Firl, G., Heinzeller, D., Zhang, M., and Trahan, S.: CCPP v6.0.0 Technical Documentation, Zenodo [code], https://doi.org/10.5281/zenodo.6780447, 2022. a, b, c, d, e
Bourgeois, Q., Ekman, A. M. L., Igel, M. R., and Krejci, R.: Ubiquity and impact of thin mid-level clouds in the tropics, Nat. Commun., 7, 12432, https://doi.org/10.1038/ncomms12432, 2016. a
Črnivec, N. and Mayer, B.: Quantifying the bias of radiative heating rates in numerical weather prediction models for shallow cumulus clouds, Atmos. Chem. Phys., 19, 8083–8100, https://doi.org/10.5194/acp-19-8083-2019, 2019. a
Chen, S., Montuoro, R., Marx, L., Goldhaber, S., Barton, N., Campbell, T., DeLuca, C., Li, B., McCarren, D., Meixner, J., Verteinstein, M., Zadeh, N., Infanit, J., Brown, B., Dunlap, R., and Theurich, G.: Toward Consistent Physical Constant Sets for Interoperable Earth System Models, https://ams.confex.com/ams/2020Annual/webprogram/Paper363511.html (last access: 23 April 2023), 2020. a
Davis, C., Lamarque, J.-F., Gettelman, A., Skamarock, B., Barth, M., and Liu, H.: An update on the System for Integrated Modeling of the Atmosphere (SIMA), https://www2.mmm.ucar.edu/wrf/users/workshops/WS2019/oral_presentations/davis_sima.pdf (last access: 24 April 2023), 2019. a
Doyle, J., Iredell, M., Tripp, P., Dudhia, J., Henderson, T., Michalakes, J., Ridout, J., Rosinski, J., Rugg, S., Adams Selin, R., Whitcomb, T., Lutz, K., and McCarren, D.: Revisiting Kalnay Rules for Physics Interoperability 25 years later, https://ams.confex.com/ams/95Annual/videogateway.cgi/id/29004?recordingid=29004 (last access: 23 April 2023), 2015. a
Doyle, J. D., Reinecke, A. A., Diaz, M., and Martini, M.: Implementation and Testing of Physics in the NEPTUNE Modeling System, in: 31st Conference on Weather Analysis and Forecasting (WAF)/27th Conference on Numerical Weather Prediction (NWP), https://ams.confex.com/ams/102ANNUAL/meetingapp.cgi/Paper/389747 (last access: 23 April 2023), 2022. a
Du, J., Berner, J., Buizza, R., Charron, M., Houtekamer, P. L., Hou, D., Jankov, I., Mu, M., Wang, X., Wei, M., and Yuan, H.: Ensemble methods for meteorological predictions, NOAA, https://doi.org/10.7289/V5/ON-NCEP-493, 2018. a
Earth System Community Modeling Portal: CCPPStandardNames Github Repository, https://github.com/escomp/ccppstandardnames (last access: 23 April 2023), 2022a. a
Earth System Community Modeling Portal: CMEPS Github Repository, https://github.com/escomp/cmeps (last access: 23 April 2023), 2022b. a
Firl, G., Swales, D., Carson, L., Bernardet, L. R., Heinzeller, D., and Harrold, M.: Common Community Physics Package Single Column Model v6.0.0 User and Technical Guide, Zenodo [code], https://doi.org/10.5281/zenodo.6896438, 2022. a, b
Gill, D., Fowler, L., Chen, M., Craig, C., Dudhia, J., Goldhaber, S., Jang, J., Wang, W., and Werner, K.: Sharing Physics Between WRF and MPAS with CCPP, https://www2.mmm.ucar.edu/wrf/users/workshops/WS2020/pdf_talks/Tues_Presentation6_Gill.pdf (last access: 24 April 2023), 2020. a
Han, J. and Bretherton, C. S.: TKE-Based Moist Eddy-Diffusivity Mass-Flux (EDMF) Parameterization for Vertical Turbulent Mixing, Weather Forecast., 34, 869–886, https://doi.org/10.1175/WAF-D-18-0146.1, 2019. a
Han, J., Wang, W., Kwon, Y. C., Hong, S.-Y., Tallapragada, V., and Yang, F.: Updates in the NCEP GFS Cumulus Convection Schemes with Scale and Aerosol Awareness, Weather Forecast., 32, 2005–2017, https://doi.org/10.1175/WAF-D-17-0046.1, 2017. a
Hassell, D., Gregory, J., Blower, J., Lawrence, B. N., and Taylor, K. E.: A data model of the Climate and Forecast metadata conventions (CF-1.6) with a software implementation (cf-python v2.1), Geosci. Model Dev., 10, 4619–4646, https://doi.org/10.5194/gmd-10-4619-2017, 2017. a
He, S., Smirnova, T. G., and Benjamin, S. G.: Single‐Column Validation of a Snow Subgrid Parameterization in the Rapid Update Cycle Land‐Surface Model (RUC LSM), Water Resour. Res., 57, 8, https://doi.org/10.1029/2021WR029955, 2021. a
Irrgang, C., Boers, N., Sonnewald, M., Barnes, E. A., Kadow, C., Staneva, J., and Saynisch-Wagner, J.: Towards neural Earth system modelling by integrating artificial intelligence in Earth system science, Nature Machine Intelligence, 3, 667–674, https://doi.org/10.1038/s42256-021-00374-3, 2021. a
Jacobs, N. A.: Open Innovation and the Case for Community Model Development, B. Am. Meteorol. Soc., 102, E2002–E2011, https://doi.org/10.1175/BAMS-D-21-0030.1, 2021. a
Kalnay, E., Kanamitsu, M., Pfaendtner, J., Sela, J., Stackpole, J., Tuccillo, J., Suarez, M., Umscheid, L., and Williamson, D.: Rules for Interchange of Physical Parameterizations, B. Am. Meteorol. Soc., 70, 620–622, https://doi.org/10.1175/1520-0477(1989)070<0620:RFIOPP>2.0.CO;2, 1989. a
McGibbon, J., Brenowitz, N. D., Cheeseman, M., Clark, S. K., Dahm, J. P. S., Davis, E. C., Elbert, O. D., George, R. C., Harris, L. M., Henn, B., Kwa, A., Perkins, W. A., Watt-Meyer, O., Wicky, T. F., Bretherton, C. S., and Fuhrer, O.: fv3gfs-wrapper: a Python wrapper of the FV3GFS atmospheric model, Geosci. Model Dev., 14, 4401–4409, https://doi.org/10.5194/gmd-14-4401-2021, 2021. a
Pfister, G. G., Eastham, S. D., Arellano, A. F., Aumont, B., Barsanti, K. C., Barth, M. C., Conley, A., Davis, N. A., Emmons, L. K., Fast, J. D., Fiore, A. M., Gaubert, B., Goldhaber, S., Granier, C., Grell, G. A., Guevara, M., Henze, D. K., Hodzic, A., Liu, X., Marsh, D. R., Orlando, J. J., Plane, J. M. C., Polvani, L. M., Rosenlof, K. H., Steiner, A. L., Jacob, D. J., and Brasseur, G. P.: The Multi-Scale Infrastructure for Chemistry and Aerosols (MUSICA), B. Am. Meteorol. Soc., 101, E1743–E1760, https://doi.org/10.1175/BAMS-D-19-0331.1, 2020. a
Randall, D., Branson, M., Wang, M., Ghan, S., Craig, C., Gettelman, A., and Edwards, J.: A Community Atmosphere Model With Superparameterized Clouds, EOS Science News, 94, 221–222, https://doi.org/10.1002/2013EO250001, 2013. a
Sarkadi, N., Xue, L., Grabowski, W. W., Lebo, Z. J., Morrison, H., White, B., Fan, J., Dudhia, J., and Geresdi, I.: Microphysical Piggybacking in the Weather Research and Forecasting Model, J. Adv. Model. Earth Sy., 14, e2021MS002890, https://doi.org/10.1029/2021MS002890, 2022. a
Stensrud, D. J.: Parameterization Schemes: Keys to Understanding Numerical Weather Prediction Models, Cambridge University Press, Cambridge, https://doi.org/10.1017/CBO9780511812590, 2007. a
Sun, X., Heinzeller, D., Bernardet, L., Pan, L., and Brown, J. M.: Case Studies That Exemplify Known Biases of the Unified Forecast System (UFS) Weather Model, AMS, https://ams.confex.com/ams/101ANNUAL/meetingapp.cgi/Paper/381125 (last access: 23 April 2023), 2021. a, b
Tallapragada, V., Chwala, A., and Levit, J.: EMC 5 Year Implementation Plan – Transition to UFS Applications, Earth Prediction Innovation Center (EPIC), https://epic.noaa.gov/wp-content/uploads/2022/07/Tallapragada-5-Year-Strategy.pdf (last access: 23 April 2023), 2022. a
Theurich, G., DeLuca, C., Campbell, T., Liu, F., Saint, K., Vertenstein, M., Chen, J., Oehmke, R., Doyle, J., Whitcomb, T., Wallcraft, A., Iredell, M., Black, T., Da Silva, A. M., Clune, T., Ferraro, R., Li, P., Kelley, M., Aleinov, I., Balaji, V., Zadeh, N., Jacob, R., Kirtman, B., Giraldo, F., McCarren, D., Sandgathe, S., Peckham, S., and Dunlap, R.: The Earth System Prediction Suite: Toward a Coordinated U.S. Modeling Capability, B. Am. Meteorol. Soc., 97, 1229–1247, https://doi.org/10.1175/BAMS-D-14-00164.1, 2016. a
UCAR-NCAR, NOAA-NWS, and NOAA-OAR: NCAR NOAA Memorandum of Agreement for Co-Development of Common Modeling Infrastructure, https://www.weather.gov/media/sti/nggps/18-064553_SignedMOU.pdf (last access: 23 April 2023), 2019. a
UFS Community: Unified Forecast System Medium-Range Weather Application 1.1, https://ufscommunity.org/medrangeweatherapp_v1p1/ (last access: 23 April 2023), 2021. a
UFS Community: Unified Forecast System Short-Range Weather Application 2.1, https://ufs-srweather-app.readthedocs.io/en/release-public-v2.1.0 (last access: 23 April 2023), 2022. a, b
Ukkonen, P., Pincus, R., Hogan, R. J., Pagh Nielsen, K., and Kaas, E.: Accelerating Radiation Computations for Dynamical Models With Targeted Machine Learning and Code Optimization, J. Adv. Model. Earth Sy., 12, e02226, https://doi.org/10.1029/2020MS002226, 2020. a
Unidata: UDUNITS, https://www.unidata.ucar.edu/software/udunits (last access: 23 April 2023), 2022. a
Unified Forecast System – Steering Committee (UFS-SC) and Writing Team: UFS Strategic Plan 2021–2025, https://vlab.noaa.gov/documents/12370130/12437941/20210406_UFS_Strategic_Plan_2021-2025_v1.0.pdf/6c42f8c7-9a08-7255-86d1-cb6113e636e8?t=1618491726122 (last access: 23 April 2023), 2021. a
van Heesch, D.: Doxygen, https://doxygen.nl/index.html (last access: 23 April 2023), 2022. a
Whitaker, J. S., Michalakes, J., Ji, M., Toepfer, F., Schneider, T., Tallapragada, V., and Tolman, H.: in: 28th Conference on Weather Analysis and Forecasting/24th Conference on Numerical Weather Prediction, https://ams.confex.com/ams/97Annual/webprogram/Paper313005.html (last access: 23 April 2023), 2017. a
Wieters, N. and Barbi, D.: esm-interfaces: Towards a Modular ESM Coupling Approach, in: EGU General Assembly, https://meetingorganizer.copernicus.org/EGU2019/EGU2019-5646.pdf (last access: 23 April 2023), 2019. a
Zhang, M., Bernardet, L. R., Firl, G., Heinzeller, D., and Li, W.: CCPP v6.0.0 Physics Scientific Documentation, https://dtcenter.ucar.edu/GMTB/v6.0.0/sci_doc/index.html (last access: 23 April 2023), 2022. a, b
Zhang, S., Fu, H., Wu, L., Li, Y., Wang, H., Zeng, Y., Duan, X., Wan, W., Wang, L., Zhuang, Y., Meng, H., Xu, K., Xu, P., Gan, L., Liu, Z., Wu, S., Chen, Y., Yu, H., Shi, S., Wang, L., Xu, S., Xue, W., Liu, W., Guo, Q., Zhang, J., Zhu, G., Tu, Y., Edwards, J., Baker, A., Yong, J., Yuan, M., Yu, Y., Zhang, Q., Liu, Z., Li, M., Jia, D., Yang, G., Wei, Z., Pan, J., Chang, P., Danabasoglu, G., Yeager, S., Rosenbloom, N., and Guo, Y.: Optimizing high-resolution Community Earth System Model on a heterogeneous many-core supercomputing platform, Geosci. Model Dev., 13, 4809–4829, https://doi.org/10.5194/gmd-13-4809-2020, 2020. a, b
Zhou, L., Lin, S.-J., Chen, J.-H., Harris, L. M., Chen, X., and Rees, S. L.: Toward Convective-Scale Prediction within the Next Generation Global Prediction System, B. Am. Meteorol. Soc., 100, 1225–1243, https://doi.org/10.1175/BAMS-D-17-0246.1, 2019. a