the Creative Commons Attribution 4.0 License.
the Creative Commons Attribution 4.0 License.
 | 01 Dec 2021
| 01 Dec 2021
POET (v0.1): speedup of many-core parallel reactive transport simulations with fast DHT lookups
Michael Kühn
Alexander Lindemann
Max Lübke
Bettina Schnor
Coupled reactive transport simulations are extremely demanding in terms of required computational power, which hampers their
application and leads to coarsened and oversimplified domains. The
chemical sub-process represents the major bottleneck: its
acceleration is an urgent challenge which gathers increasing
interdisciplinary interest along with pressing requirements for
subsurface utilization such as spent nuclear fuel storage,
geothermal energy and CO2 storage. In this context we developed
POET (POtsdam rEactive Transport), a research parallel reactive transport simulator
integrating algorithmic improvements which decisively speed up
coupled simulations. In particular, POET is designed with a
master/worker architecture, which ensures computational efficiency
in both multicore and cluster compute environments. POET does not rely on contiguous grid partitions for the parallelization of
chemistry but forms work packages composed of grid cells distant
from each other. Such scattering prevents particularly expensive
geochemical simulations, usually concentrated in the vicinity of a
reactive front, from generating load imbalance between the available
CPUs (central processing units), as is often the case with classical partitions.
Furthermore, POET leverages an original implementation of the
distributed hash table (DHT) mechanism to cache the results of
geochemical simulations for further reuse in subsequent time steps
during the coupled simulation. The caching is hence particularly
advantageous for initially chemically homogeneous simulations and
for smooth reaction fronts. We tune the rounding employed in the DHT
on a 2D benchmark to validate the caching approach, and we evaluate
the performance gain of POET's master/worker architecture and the DHT speedup on a 3D benchmark comprising around 650 000 grid elements.
The runtime for 200 coupling iterations, corresponding to 960
simulation days, reduced from about 24 h on 11 workers to 29 min
on 719 workers. Activating the DHT reduces the runtime further to
2 h and 8 min respectively. Only with these kinds of reduced
hardware requirements and computational costs is it possible to
realistically perform the long-term complex reactive transport
simulations, as well as perform the uncertainty analyses required
by pressing societal challenges connected with subsurface
utilization.
- Article
(3304 KB) - Full-text XML
- BibTeX
- EndNote





The term reactive transport indicates coupled numerical models investigating interacting hydrodynamical, thermal and chemical processes of reactive fluids in porous or fractured media (Steefel et al., 2015). It finds wide application in subsurface utilization such as assessment of long-term safety of CO2 storage or spent nuclear fuel repositories, understanding of ore formation and hydrothermal systems, or geothermal energy utilization. These models are severely challenging from a computational standpoint, forcing the setup of geometrically coarsened, simplified domains with respect to those routinely tackled by purely hydrodynamical simulations (De Lucia et al., 2015), nonetheless requiring many-core infrastructures to achieve acceptable runtimes.
The chemical sub-process, although an inherently embarrassingly parallel task, represents the computational bottleneck in this class of coupled simulations. In practical real-life use cases, an overwhelming 80 % to 99 % of total CPU time is spent in the chemistry sub-process (De Lucia et al., 2015; Leal et al., 2020). For this reason, in recent years large efforts have been dedicated by the scientific community to the speedup of coupled reactive transport simulations. The focus has been on improving the numerical efficiency of the specialized chemical solvers, or on replacing chemistry altogether with statistical surrogates. To our knowledge, only marginal attention has been paid to optimal load balancing in the context of parallel computations.
In the next section we give an overview of recent related work concerning reactive transport simulators and acceleration strategies.
1.1 Parallel reactive transport simulators: state of the art
The coupling between the involved processes of solute transport
within a fluid phase and their chemical reactions with rock-forming
minerals can be achieved in three ways (see Steefel et al., 2015, and references
therein also for the software cited below): on the one
hand the global implicit approach, in which the geochemical
subsystem is solved together with the partial differential equations (PDEs) representing the transport
of solute species (implemented by, for example, PFLOTRAN), and on
the other the operator splitting approach, in which the
processes are solved sequentially. The latter is furthermore
subdivided into the sequential iterative (SIA; implemented
by, for example, HYTEC, TOUGHREACT, CRUNCHFLOW) and sequential non-iterative (SNIA, TOUGHREACT, OpenGeoSys) approaches. The
sequential architecture is usually considered to be the most
advantageous and flexible in terms of software development, since it
scales much better with the number of considered chemical species and
reactions, and it fully exploits the embarrassing parallelism of
chemical simulations at each simulation time step. Furthermore, it
allows specialized simulators to be used for each sub-process, whereas a
global implicit scheme requires an ad hoc implementation.
Traditionally, the reactive transport community has rather been focused on implementing parallelism of specialized simulators (e.g., Steefel et al., 2015; Beisman et al., 2015; Moortgat et al., 2020) in order to efficiently scale when computing on large HPC facilities. Since the parallelization of flow and transport is much harder than chemistry, these simulators rely on fixed domain partitioning, and the computational load of chemistry is addressed by using more CPUs. He et al. (2015) describes a parallelization strategy in which the available CPUs are pooled in two distinct groups, the first being used to solve flow and transport, and the second exclusively for geochemistry. In this scheme it is therefore possible to implement different strategies for optimal load balancing of the geochemical sub-processes; however, no further in-depth analysis for the achievable performance gain is provided. Finally, advances in software engineering produced general-purpose multiphysics frameworks able to solve arbitrary PDEs describing different coupled processes. These frameworks usually offer features such as user-transparent parallelization on different hardware and dynamic grid refinement (e.g., Permann et al., 2020). Implementations of reactive transport simulators based on these kinds of frameworks are being published (Damiani et al., 2020; Kyas et al., 2020; Soulaine et al., 2021), but to our knowledge a detailed analysis of optimal parallelization specific to geochemistry is not yet available.
A complementary research axis is represented by surrogate geochemical models, employed at runtime during the coupled simulations in place of the expensive equation-based chemical solvers (Jatnieks et al., 2016; De Lucia et al., 2017). Surrogate models are statistical multivariate regressors which are trained in advance on an ensemble of geochemical simulations spanning the expected parameter space encountered during the coupled simulations. Regressors commonly employed for this goal are artificial neural networks (Laloy and Jacques, 2019; Guérillot and Bruyelle, 2020; Prasianakis et al., 2020; Lu et al., 2020), random forest (Lu et al., 2020), xgboost (De Lucia and Kühn, 2021a), and Gaussian processes (Laloy and Jacques, 2019). For low-dimensional problems, such as calculating the number of free variables that define the behavior of a chemical system, employing lookup tables proved to be a feasible approach (Huang et al., 2018; Stockmann et al., 2017). However, their applicability degrades rapidly with dimensionality of the chemical system, since search and interpolation within the tables become exponentially more costly when dealing with many independent variables. All these approaches have in common the necessity to precalculate the chemistry, and many research questions are still open concerning the required sampling density of the parameter space and the optimal tuning strategy of the surrogates, which is a hardly automatable problem.
Leal et al. (2020) proposes an on-demand learning strategy for speeding up the chemical calculations without any need for training in advance. Their algorithm, implemented in the Reaktoro simulator (Leal, 2015), tries first to predict the result of an equilibrium calculation using a first-order Taylor extrapolation from a previously fully computed equilibrium state. If the prediction is not accurate enough, a new full equilibrium calculation is performed and the sensitivity matrix of the newly computed equilibrium state is saved for future predictions. An on-demand clustering strategy is furthermore applied to the stored computations to optimize the search for the equilibrium state most suitable for extrapolation from each given new prediction. The on-demand clustering strategy was devised to eliminate the curse of dimensionality that existed in their previous version of the algorithm (Leal et al., 2017), which relied on a nearest-neighbor search strategy (Kyas et al., 2020).
1.2 Contributions of this paper
We initiated the development of POET in order to integrate and
evaluate different algorithmic improvements capable of accelerating
coupled reactive transport simulations, in the framework of a SNIA
coupling, and focussing in particular on the acceleration of the
geochemical sub-process. POET's parallelization of the geochemistry
has been designed with a master/worker architecture based on the MPI
standard (Message Passing Interface Forum, 2015). Furthermore, we introduce a novel MPI-based
implementation of distributed hash tables (DHTs), enabling
caching of already computed geochemical simulations and their
subsequent reuse in further time steps. Since lookup and retrieval
from the DHT is much quicker than the setup and calculation of the
corresponding “full physics” chemical simulations, the caching
promises significant speedup when the already computed values are
frequently reused. This is a common occurrence in many practical
reactive transport scenarios, which often start from an homogeneous
initial state and where a reactive front typically spreads through the
domain with a high degree of self-similarity (De Lucia et al., 2015).
Overall, the contributions of this work as implemented in POET and
which are detailed in the paper can be summarized as follows:
-
We propose a master/worker design and a load distribution algorithm to speed up geochemical sub-processes (Sect. 2.2).
-
We present a novel implementation of a fast MPI-based DHT (Sect. 2.4.1).
-
We propose the concept of approximated lookups, where already simulated results are reused to approximate the results of geochemical simulations with similar input combinations (Sect. 2.4.3).
-
We validate the approximated lookup approach with respect to the variables' rounding (Sect. 4.1).
-
We evaluate in detail the performance of
POETwith a 3D benchmark model comprising around 650 000 grid elements and 200 coupling iterations, using up to 720 cores on a compute cluster, highlighting the linear scaling achieved withPOET's architecture and the decisive benefit given by the DHT (Sect. 4.2).
POET's architecture and DHT implementation POET implements a SNIA coupling between the processes involved in
reactive transport in porous media: hydrodynamic flow, solute
transport, and geochemistry (Fig. 1). Since
our focus lies on the runtime improvement of the geochemistry, the
current POET implementation of hydrodynamic flow and transport is
quite simple. However, the generated results can be directly
transferred to many practical scenarios of subsurface utilization,
which are extremely advection-dominated (high Péclet numbers) and with
kinetically limited reactions, a common occurrence in, for example, CO2
storage scenarios (De Lucia et al., 2015).
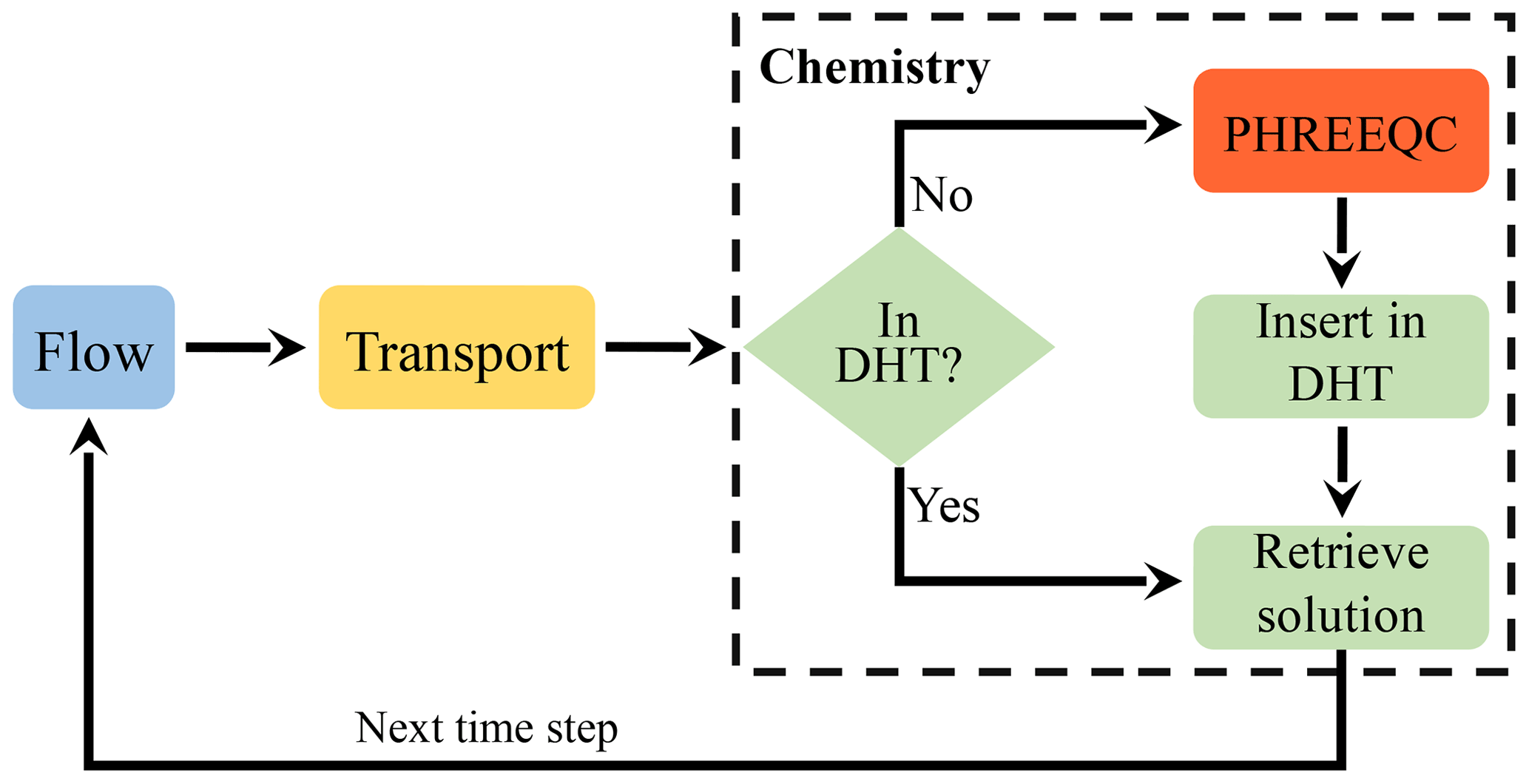
Figure 1Schematic representation of sequential non-iterative approach (SNIA) coupling of the three sub-processes flow, transport and chemistry. Distributed hash tables are filled at runtime with the results of “full-physics” chemical simulations, so that these can be reused at subsequent coupling iterations for similar chemical problems.
For historical reasons, POET is written in C++ wrapping large
portions of high-level R code using the RInside
framework (Eddelbuettel et al., 2021). The C++ glue code is also responsible for
the parallelization, implemented using MPI (Message Passing Interface Forum, 2015). MPI is the de
facto standard in the HPC community and supports fast point-to-point
communication and collective operations like broadcasts and barriers.
2.1 Flow and transport in POET
POET uses at the moment of writing an advection with an explicit
first-order Euler scheme (forward time, with upwinding) on irregular,
unstructured finite-volume discretizations of any shape and
dimensionality. Some more details about this implementation can be
found in De Lucia et al. (2017). The fluxes of the moving fluid phases
across the interfaces of domain elements are externally pre-computed
using the multiphase simulator MUFITS (Afanasyev, 2013, 2015; De Lucia et al., 2016) and loaded as “flow snapshots” at the
beginning of the reactive transport simulations. Thus, there is no
feedback, at the moment, between change in porosity following chemical
reactions and hydrodynamics. Another important simplification is that,
within a time-step of the coupled simulation, hydrodynamic flow is
considered stationary. The time lags between available successive flow
snapshots define the time-stepping of the coupled simulations. For the
internally computed advection, the Courant–Friedrich–Levy condition
for the maximum allowable time step of transport reads as follows:
where the subscript i refers to the ith grid element, F (kg s−1) is the total mass flux of the transporting phase (water) across the element boundaries, S (–) is the saturation of the water phase, ρ (t m−3) is its density, V (m3) is the volume of the grid element and φ is the porosity. If this Δtadv is less than the overall requested Δt, several “advective inner iterations” are computed before calling chemistry. For this reason, the flow snapshots fed to the coupled simulation must be frequent enough, although no requirement on constant time stepping is made. In the results presented in the remainder of the paper only a few time steps required three or more inner advection iterations. This is a legitimate approximation for moderately transient flow regimes and for moderate amounts of chemical reactions.
The geochemical reactions are computed using the established
PHREEQC simulator (Appelo et al., 2013) through the R interface
(De Lucia and Kühn, 2013; De Lucia et al., 2017; De Lucia and Kühn, 2021b). Flow and transport are
computed sequentially on a single CPU at each iteration.
2.2 POET: master/worker parallelization of chemistry
The master/worker design is a coarse-grain parallelization approach
where the master process distributes work packages to the
worker processes. Each worker starts then the simulation with the
received input parameters and reports the results back to the master
process. Since the communication is done via MPI, POET may run on
multicore systems, but also on distributed memory machines like
compute clusters.
In general, the simulation time of each single chemical computation depends heavily on the input parameters and thus varies in space and time during the coupled simulations. While in some grid elements the chemical computation may only require a few iterations of the geochemical solver (elements either not yet reached by the reactive solution or where the bulk of the reactions has already happened), in the vicinity of the reaction front the simulation time is typically much higher. Figure 2 showcases the simulation time differences between blocks of five neighboring grid cells for an exemplary iteration of a two-dimensional benchmark (described in Sect. 3.2). The reaction front propagates from the upper left corner to the middle of the field. While in blue regions the runtime is under 200 ms, the runtime in the green area of the reaction front is between 250–300 ms, which is a significant 50 % increase. This shows that relevant work imbalances are already detectable for fairly simple scenarios: were all work packages comprising five cells run in parallel, the overall simulation time required by geochemistry would be controlled by the most computationally intensive one, located at the reaction front. In computer science terminology, this is called a heterogeneous workload.
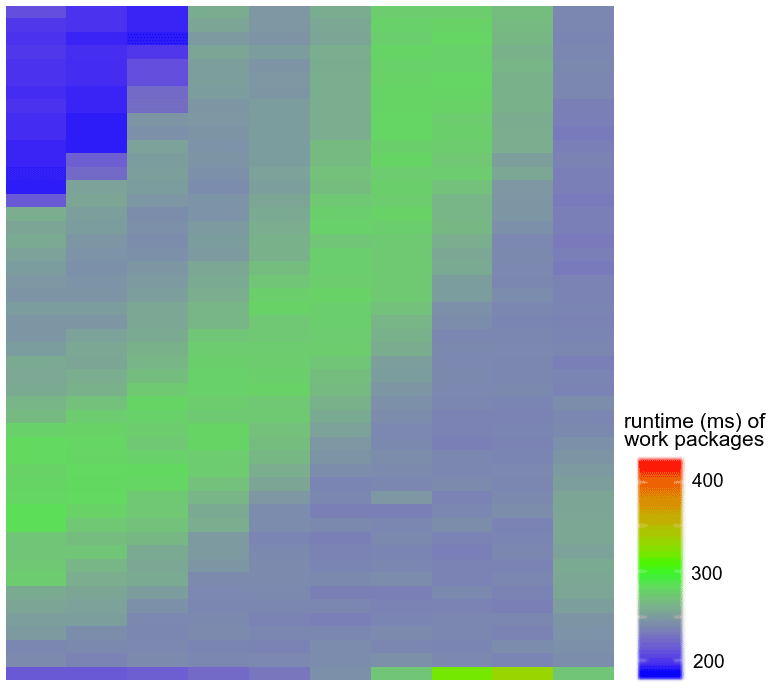
Figure 2Runtimes for single work packages composed of 5 contiguous cells in an exemplary 2D 50 × 50 simulation. Chemistry is more computationally intensive near the reaction front, and contiguous domain partitioning can therefore suffer from suboptimal load balance.
In the case of the heterogeneous workload typical for reactive transport
simulations, a static workload distribution such as that depicted in
Fig. 2, in which each worker is assigned a fixed
number of grid elements, is particularly prone to unbalanced loads,
where some workers are still computing while others are already idle.
For POET, we chose instead a dynamical work load distribution,
which decouples the number of workers and the dimension of the work
packages. Furthermore, instead of composing work packages with
contiguous domain partitions, POET packs a user-specified number of
grid elements far from each other into the work packages, in a
domain-independent algorithm often referred to as round robin
(Fig. 3, for a scenario with 4 workers).
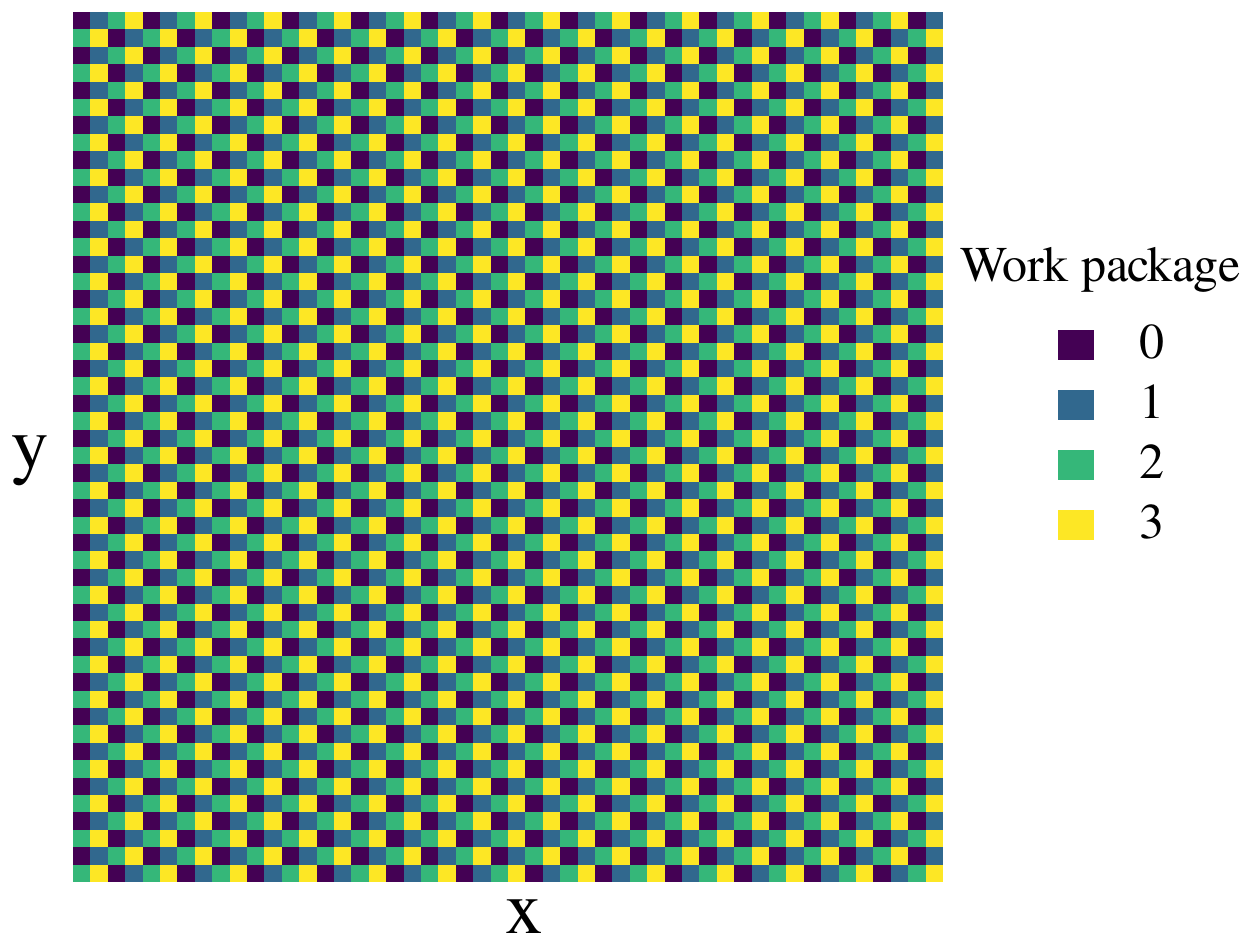
Figure 3A round-robin distribution of grid elements into four work
packages for the two-dimensional 50 × 50 grid of the
SimDol2D scenario. Thereby, the elements with high
compute demands, corresponding to the passing reaction front, are
automatically distributed over the available workers.
With this design choice, the work for areas with high workload will automatically be well distributed across different work packages throughout the simulation run. Since we combine the round-robin partitioning with dynamic load balancing, the partitioning is only important for constructing the list of the work packages, and the maximal length of a work package is a parameter that the user can specify depending on the problem at hand and the compute cores available. The influence of this parameter is evaluated specifically in Sect. 4.2.3.
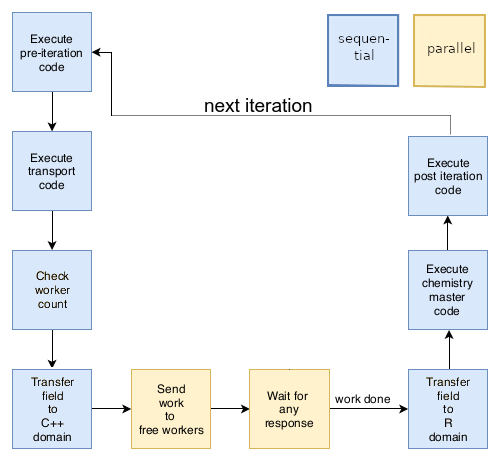
POET's master loop is shown in Fig. 4. During the
first coupled iteration, the domain elements are assigned to a given
work package. This round-robin partitioning is static throughout the
simulation, and the indices pointing from each domain element to its
work package are stored by the master process. A coupling iteration
starts by reading the Darcy velocities from the MUFITS snapshots, upon
which solutes' advective transport is computed. Then the partitioning
indices are reused by the master process to fill a two-dimensional
row-major buffer in which all the domain elements belonging to a work
package are contiguous. The chunks corresponding to a work package are
then dispatched dynamically to the free workers. This means that in a
first round, the master sends work packages to all idle workers and
then waits for the results. When the reply message of a worker is
received, the master distributes the next work package to the now idle
worker. This is done as long as there is still work to do, i.e., as
long as there are still grid elements to simulate. After all work
packages have been processed, the master proceeds to reassemble the
original list of domain elements with the updated concentrations, and
after performing some post-iteration operations (such as writing the
current snapshot onto disk), it advances to the next coupling
iteration.
2.3 Distributed hash tables: related work
Distributed hash tables are frequently employed to enable fast distributed storage and data retrieval, especially for applications in big data and data analytics. Prominent examples are Redis (Red, 2021) and Memcached (Mem, 2021), which are used by high-throughput web applications like Facebook and Netflix. Since these systems follow the client–server architecture, the user would have to set up the DHT as an additional software component which runs separately. While systems like D1HT (Monnerat and Amorim, 2015) use their own communication framework, there exist several MPI-based designs (see for example Tsukamoto and Nakashima, 2010; Wozniak et al., 2010; Li et al., 2016; Maynard, 2011).
Processes within an MPI application are addressed uniquely via a
communicator and a so-called rank within the
communicator. Tsukamoto and Nakashima (2010) implement a DHT using an
algorithm adapted from the Chord algorithm (Stoica et al., 2003). They
focus on the dynamic communication behavior of the algorithm and
propose the MPI routines MPI_Comm_accept and
MPI_Comm_connect, which establish communication between sets
of processes which do not share a communicator. This approach
does not fit our use case since all POET workers belong to the
same MPI application and therefore share the communicator MPI_COMM_WORLD.
Wozniak et al. (2010) present an implementation called C-MPI of the
Kademlia DHT (Maymounkov and Mazières, 2002) for grid and HPC environments. Their
implementation is accessible through a put/get C-MPI API which is
built on a custom event-driven, remote procedure call (RPC) library
called MPI-RPC. MPI-RPC allows the programmer to register local
functions for invocation by remote processes over MPI. This is again
not suited for POET, since all POET workers are running within the
same application.
Gerstenberger et al. (2014) have measured performance
scaling of a distributed hash table up to 32 000 cores. They implemented
their own MPI-3.0 RMA library for Aries and Cray Gemini interconnects
named foMPI (fast one-sided MPI). Inserts are based on atomic compare
and swap (CAS) and atomic fetch_and_op operations which are
implemented on top of proprietary Cray-specific APIs.
Christgau and Schnor (2017) also recommend the use of MPI's one-sided communication API for the implementation of an DHT. They present an algorithm for the implementation of MPI's passive target synchronization with the readers-and-writers semantics. The implementation is suited for non-cache-coherent many-core systems like Intel's experimental Single-Chip Cloud Computer (Howard et al., 2010).
POET's DHT design is also based upon MPI's one-sided communication
API. The benefit of the one-sided MPI API is that the basic
operations, MPI_put and MPI_get, are typically
implemented using fast remote direct memory access (RDMA) on networks
like InfiniBand (Mellanox Technologies Inc., 2003).
2.4 The design of POET's MPI-based DHT
Before a worker starts a geochemical simulation, it checks whether a
similar value has already been simulated and stored in the DHT.
This section presents the design of POET's DHT implementation.
We use the following naming conventions. The memory where a key-value pair is stored is called a bucket. The index is the offset of a bucket within the memory of the target process. The worker process which stores the key-value pair is called the target of the read/write operation.
The DHT shall fulfil the following requirements:
-
Distributed memory. The DHT shall support large parallel runs on compute clusters.
-
Usability.
POETshall be self-contained for easy use and the installation of additional cache servers like for example Memcached and Redis shall be avoided. -
Readers-and-writers semantics. The parallel read and write operations of the workers have to be synchronized. Concurrent reading is allowed, but a write request has to be done exclusively on the data item.
-
Collision handling. Since the use of a hash function may lead to collisions, there has to be some form of collision handling implemented.
Since POET shall be easy to use as an parallel application without
the installation of additional cache servers, we have implemented the
hash table within the POET worker processes with the help of
additional library calls. We distribute the hash table over all
workers to support the scalability of the application. Having only a
single worker serving as a data store may induce memory problems, and
the corresponding worker may become the bottleneck of the application.
Hence, in POET's architecture, the hash table is distributed over all
workers. We need message passing support for the communication between
the worker process which wants to read or write into the DHT and the
worker process which is responsible for the corresponding DHT bucket.
We use the high-performance communication library MPI for the
implementation of the DHT. Thus the DHT will benefit from any
improvement made within the MPI library, for example, MPI
implementations like MPICH, OpenMPI and MVPICH and vendor-specific MPI
implementations like Intel's MPI leverage Remote Direct Memory Access
(RDMA) offered by InfiniBand networks (Mellanox Technologies Inc., 2003).
2.4.1 POET's DHT implementation
A distributed hash table stores (key, value) pairs, and any
participating node can efficiently retrieve the value
associated with a given key. Typically, a hash function is used for
the fast mapping of the key to the address of the value. POET's DHT
API and its design follows the approach presented by Christgau and Schnor (2017).
The first design issue concerns the choice of the MPI communication
primitives. MPI offers both one- and two-sided communication. For
decades, two-sided communication via SEND/RECV was the most
popular building block for parallel applications. But in that model, a
process has to actively call a MPI_Recv. This communication
model is suited for regular communication, where for example
neighboring processes have to exchange
ghost zones (Foster, 1995).
A DHT does not follow this model since the next communication depends
on the lookup key and is not known in advance. An implementation
making use of two-sided communication, based on SEND and
RECV operations, would be cumbersome for such a dynamic
communication pattern. Furthermore, compute time may be wasted in
blocking RECV operations. One-sided communication based on
PUT and GET operations is a much better paradigm for
a DHT implementation. It allows the communication
parameters to be specified by the initiator process only, i.e., the one that
wants to read or write into the DHT and does not require any
interaction like a RECV call on the receiver/target side.
Since the initiator process reads/writes the remote memory of the
target process, these operations are also called MPI Remote
Memory Access (RMA) operations (Message Passing Interface Forum, 2015). On networks like
InfiniBand with RDMA support, these communication operations are
implemented very efficiently without interaction with the remote CPU.
When the parallel MPI application starts, every process gets an unique
identifier called rank. In POET's master/worker design, the
rank 0 process becomes the master, while all other processes
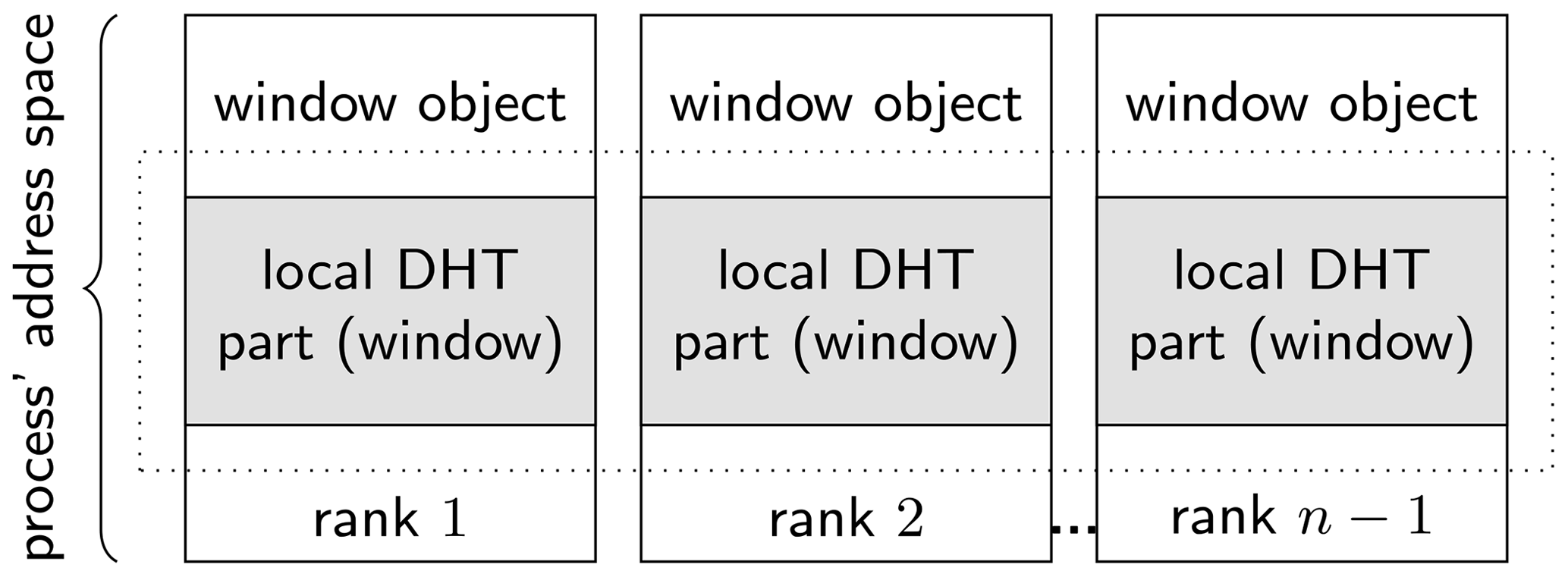
are workers. Figure 5 shows the address space of
the worker processes. All worker processes announce some part of their
local address space for remote access. This is done in the following
way:
-
First each worker allocates memory using
MPI_Alloc_mem. This MPI function is recommended since it allows optimizations on shared memory systems. -
The memory is initialized with zeros.
-
The memory is announced to the other workers for remote access using
MPI_Win_create.
Since the workers are running in parallel, the put and
get accesses have to be synchronized. Here, a readers-and-writers model allowing reads to occur concurrently while inserts are
done exclusively is advantageous.
This coordination scheme is implemented using MPI's passive
target synchronization (Message Passing Interface Forum, 2015) which provides exclusive locks for one writer and shared locks for many readers.
Figure 6 shows the pseudocode where the
put and get operations are protected by the
corresponding lock calls.

In Appendix A both the API
(Application Programming Interface) and some useful additional
features of POET's DHT implementation are briefly described.
2.4.2 Addressing and collision handling
An MPI process is specified by its rank within a
communicator. Hence, to localize the right bucket within the
DHT, the rank of the bucket owner and the bucket index within
the window is needed. The simulation input parameters are used as key
for the hash function. While the variables are stored as floats in
double precision, they are rounded before hashing with a per-variable
configured number of digits. More details about this aspect is given
in Sect. 2.4.3.
The default configuration takes md5sum as hash function, which delivers a 128-bit-long hash value. To determine the rank of the responsible worker a simple modulo calculation is now used with the number of workers as the modulus.
Indexing the bucket containing the actual data is a bit more complex.
If we take the complete md5sum as the index, this results in 2128
buckets which describe a much too big index space. To address the
complete DHT, each part must be at least n bits in size so that
2n will be greater than or equal to the table size per process. Since
the smallest arithmetic data type in C is a char and so a byte,
n must also be divisible by 8. Since the md5sum gives us more
entropy than needed for addressing, we use it to create an
index list to store possible indices. The first free bucket
is used for storing the value. In the case that there are collisions for
all indices, the key-value pair in the bucket addressed by the last
index is evicted. Analogously, if we look up a table entry, we test one
index after another.
In our current implementation, the user defined hash function must return a 64-bit hash. Therefore, the md5sum hash is divided into two 64-bit parts, and both parts are bitwise XORed to deliver a 64-bit-long hash. The 64 bits are again split into parts. The parts may also overlap each other. For example, in a setup with 7 017 920 buckets per process, the size of each index must be 3 bytes (224 bits ≥ 7 017 920), and the resulting index count is set to 6. The chosen indices are shown in Fig. 7. Each key-value pair now has 6 possible locations in the hash table that can be used in case of collisions.
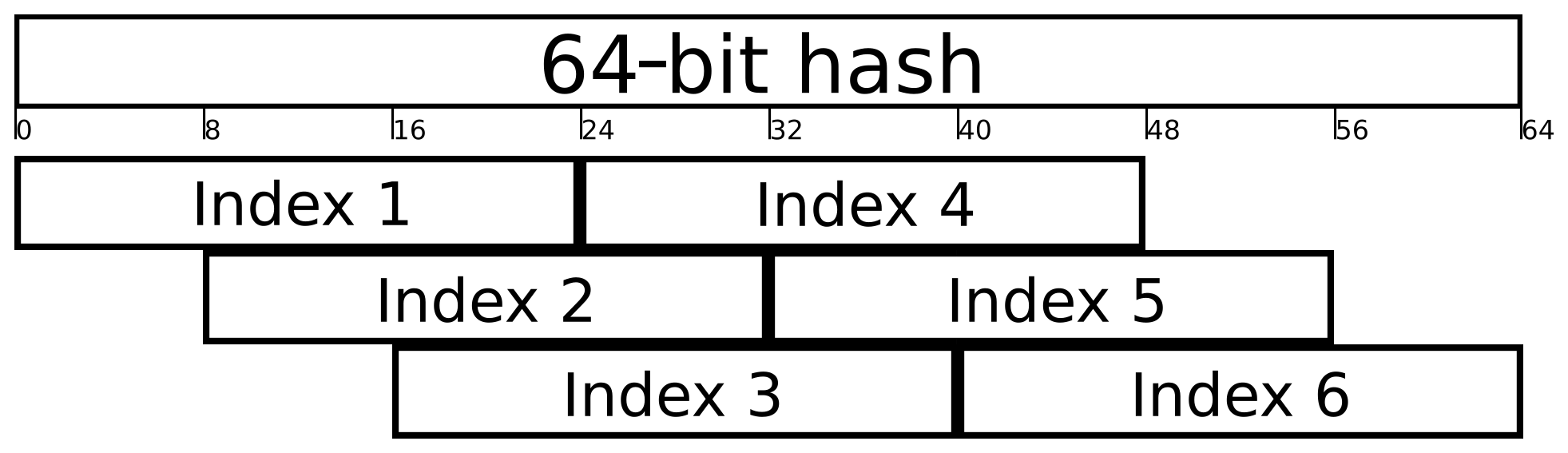
Figure 7The hash value is used to determine the address of the corresponding bucket. Since collisions are possible, several possible addresses are derived from the hash value, and they are tested one after another.
2.4.3 Approximated lookup
The DHT is employed in POET to store the results of geochemical
simulations, which are largely multivariate both in input and output,
by indexing them with a single key (the hash) from all the input
variables. This means that a key-value data structure such as a hash
table is only able to index an exact combination of input values.
However, performing a rounding to user-defined significant digits for
the input variables before computing the hash allows such
constraint to be relaxed and, in effect, defines the concept of approximated lookup, in which slightly different input combinations are in
practice confounded. This in turn may introduce an error into the
coupled simulations, which then propagates in space and time during
the next iterations. It is therefore important to choose a rounding
which maximizes the reuse of already cached results while not causing
significant errors. Finding the optimal rounding is a
problem-dependent task and, given the nature of the numerical input
values of geochemical simulations, which may vary by many orders of
magnitude and which may carry different sensitivities on the results,
further research is required to automate it.
POET lets the user decide how many significant digits are retained
separately for each input variable and also offer the capability of
working with logarithmic variables. In the present version, if not
differently specified by the user, the default rounding is at seven
digits with the logarithm.
2.4.4 Remarks
Since the DHT is integrated as a library within the MPI application and managed by the worker processes, no additional software installation is necessary. The DHT itself is built using MPI. Therefore, it is suited for both shared and distributed memory machines, and especially for compute clusters. Furthermore, we introduced the concept of an index list to efficiently handle collisions. In case all buckets referenced by the indices of the list are occupied, a simple eviction strategy overwriting the last bucket is used.
While MPI's concept of passive synchronization very comfortably supports the implementation of the readers-and-writers semantics, it puts additional synchronization overhead to the application. Furthermore, the synchronization is coarse-grained, since a writer locks the complete window instead of only locking the bucket where it wants to write. This synchronization overhead may eat away the benefit of the DHT usage.
But before we go into the deeper performance evaluation in Sect. 4.2, we first validate whether the approximations associated with the DHT approach deliver trustworthy results.
In the present work we first validate the approximated lookup using
POET's DHT and secondly evaluate its performance. For the validation,
which focuses on the choice of the rounding of inputs for the
computation of the hashes and its influence on the results with respect to
reference simulations, a 2D domain of 2500 elements is employed. To
evaluate POET's performance and parallel scaling on a many-core
compute cluster, the same chemistry (and DHT parametrization) are
solved on a much larger 3D domain comprising around 650 000 elements.
3.1 Chemical problem
The chemical problem solved throughout the present work derives from Engesgaard and Kipp (1992) and is commonly used, with different variants, in the reactive transport community (e.g., Shao et al., 2009; De Lucia et al., 2017; Damiani et al., 2020; Leal et al., 2020; De Lucia and Kühn, 2021a). A MgCl2 solution enters a domain whose pore water is at thermodynamic equilibrium with calcite. The injected solution triggers the dissolution of calcite and the transient precipitation of dolomite. A total of eight variables thus completely define the chemical system. Six are related to aqueous concentrations and must be transported: the total elemental concentrations of C, Ca, Cl and Mg, plus pe and pH (transported respectively as e− and H+). The amounts of the two minerals, calcite and dolomite, are immobile.
The kinetics of calcite and disordered dolomite reactions are taken from Palandri and Kharaka (2004), removing the carbonate mechanism. The rate of precipitation of dolomite is set to be equal to the rate for dissolution. Furthermore, the reaction rates are considered independent of specific reactive surface area and thus from the quantity of mineral present in the grid element.
3.2 Validation benchmark: SimDol2D
For the purpose of validation of the DHT approach, the chemical
problem defined in the previous paragraph is solved on a 2D,
homogeneous Cartesian square grid of 50 m sides comprising
elements (see Fig. 2). Porosity is constant at
0.25 and permeability at 100 mDa. The top-left grid element is held at
a constant hydraulic pressure of 15 bar while the opposite side is held
at a constant pressure of 10. This results in a quasi-stationary flow
regime, which is simulated with MUFITS for a total of 200 d,
retaining one snapshot of flow velocities every 10 d, for a total of
20 snapshots. The coupled simulations are, however, prolonged to reach
300 coupling iterations reusing the last available flow snapshot, to
ensure that the whole simulation grid is reached by the reactive front
by the end of simulation time. In the following we refer to this
simulation scenario with the name of SimDol2D.
3.3 Performance evaluation benchmark: SimDolKtz
A much more challenging hydrodynamic setting called SimDolKtz
has been used for the evaluation. This scenario depicts a monophasic
injection of a MgCl2 solution in the same simulation grid used
for the history-matched Ketzin pilot site for CO2 storage
(Martens et al., 2013; Kempka et al., 2013, 2014) near Potsdam, Germany,
over a period of 60 d. The discretized domain contains 648 420
cells of different volumes and has spatially heterogenous porosity and
permeability. The injection happens at a constant rate in correspondence
with the injection borehole of the Ketzin pilot site. Constant
pressure boundary conditions are achieved by setting pore-volumes
multiplicators at the outermost boundary elements of the domain. In
total, 20 snapshots of the resulting MUFITS flow simulations are
employed in the coupled simulations, the first 10 at time intervals of
1 d and the following 10 at a 5 d lag, for a total of 60 d
(20 iterations). Since for this case the time stepping is not
constant, the Δt for the chemical calculations must be stored
as an additional input value in the DHT. The last flow snapshot is
subsequently reused for 180 further coupling iterations, with the same
5 d lag, thus reaching 960 d in simulation time and
200 iterations in total.
3.4 Error measure
The chosen synthetic measure for the comparison of the simulations with DHT with respect to the reference in a multivariate setting requires the normalization and combination of the different variables. We chose a relative root mean squared error using the maximum value of each variable as the norm, combined with the geometric mean resulting in the expression of Eq. (2):
where m is the number of distinct variables to compare, n the number of considered grid elements and t the particular time step where the error is computed. A single numeric value, averaged throughout the domain, comparing multiple variables at once is of course susceptible to overlooking discrepancies which, given the highly non-linear nature of chemistry, may in turn cause diverging trajectories in space and time. It remains hence very difficult to define an a priori threshold after which the approximated simulations must be rejected.
For the chemical problem considered in these benchmarks, a value of
roughly 10−5 emerges a posteriori as a sensible limit. We
would like to stress the fact that the same workflow we present in
this work should be employed when using POET: some preliminary
simulations on coarser or smaller grids should be run beforehand to
check the retained digits for DHT and their influence on the results.
Once optimal values emerge, as well as the confidence in the ability
of a defined error measure to capture drifts or errors, then the
larger, expensive runs should be launched.
4.1 Validation of approximated lookups
The chemical problem tackled in SimDol2D is expressed in
terms of eight input/output variables. Our DHT implementation allows a
granular, per-variable choice of digits retained for the
hashing, to accommodate the possibility of larger precision for
specific variables. In case of geochemical problems, it is sensible to
assume, for example, that aqueous concentrations, including pe and pH,
generally require a larger precision than mineral amounts. However,
for simplicity, we divided these eight variables in two distinct
classes, for which a different number of significant digits are used
in the hashing algorithm. Hence we considered “class 1” the
variables representing aqueous concentrations and “class 2” the
mineral phases. We tested different numbers of significant digits for
both classes: {5, 6, 7, 8 } for class 1 and {4, 5, 6, 7} for class
2. The cross-product of all these combinations were repeated using
both the original variables' values for the hashing and their
logarithms, for a total of 32 runs beside the reference.
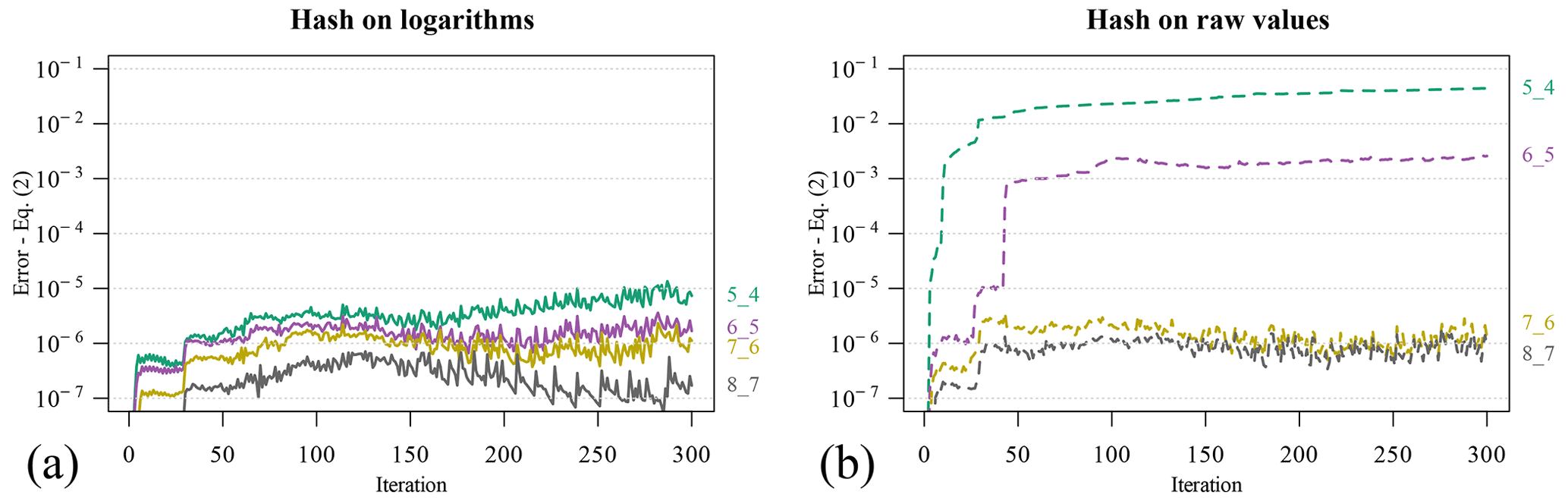
Figure 8Error as defined by Eq. (2) along the simulations with DHT compared to the reference, as a function of the retained digits for hashing. Colors and labels on the right margin encode the digits used for class 1 and class 2 variables respectively. (a) Logarithm of variables used for hashing; (b) hash taken on raw variables.
Figure 8 shows the error as defined in Eq. (2) of four DHT simulations using different roundings for up to 300 iterations. Colors and labels on the right margin encode the digits used for class 1 and class 2 variables respectively. The left image shows the error when hashing logarithmic variables, and the right one when using raw variables. It is evident that taking the logarithms of the variables before hashing dramatically increases the accuracy of the coupled simulations with DHT if compared to the hashes taken on the raw variables with the same digits. Furthermore, all of the considered logarithmic simulations are in an acceptable discrepancy with respect to the reference, whereas this is true only for a larger number of digits in the raw variables.
The errors introduced in the coupled simulations by approximated lookup can propagate in space and time and possibly lead to unphysical simulation results. The maximum deviations with respect to the reference of each DHT run across all iterations is therefore given in Table 1. The table is ordered starting with the entry for the largest digits (rounding 5_4) up to the smallest (rounding 8_7).
Table 1Validation of the SimDol2D scenario with DHT: maximum errors across all iterations for different retained digits. The logarithmic case shows a clear advantage compared to the raw variables, being consistently more accurate. For this use case the total error should not exceed roughly 1 × 10−5.
The unacceptable errors (leading to unphysical simulation results)
are encoded in bold fonts; italic font is used for acceptable
simulations and normal fonts are used for simulations with
negligible accuracy losses.
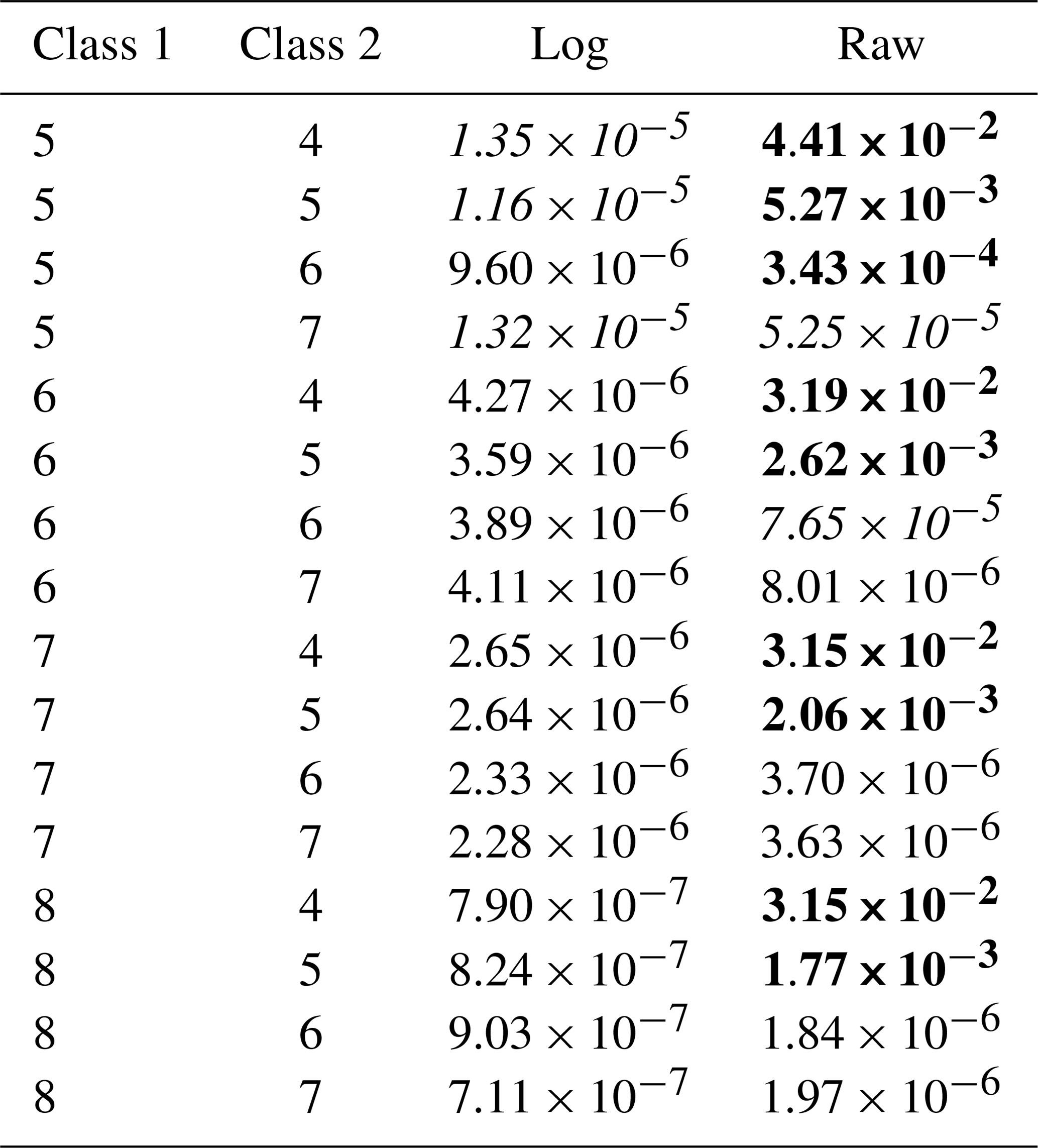
From this table it is clear that there is no unique order relation between the maximum errors and the digits used for the variable hashing. This means, for example, that the error for the logarithmic “5_7” case is larger than in the logarithmic “5_5” case. This can be interpreted as a consequence of the irreducible randomness in how the DHT is filled at runtime and the actual magnitude of the error; even if the overall error is small, it is possible that a significant discrepancy of one single variable, in certain regions of the parameter space, causes quickly diverging trajectories for the coupled simulations. However, in general, logarithmic variables always produce acceptable to negligible errors for this scenario, even with the lowest number of considered digits: only in two cases their errors slightly trespass 10−5, which can be taken as a rough threshold for satisfying accuracy of the end results. These cases are encoded in italics in Table 1. Again, much larger errors are observed if the raw variables are used for hashing instead of the logarithmic values. Here, all simulations with 5 digits or less for one of the two classes produced completely unacceptable results (encoded in bold in the table).
A visualization of the accuracy of the DHT results is given in Figs. 9 and 10. They depict the scatter plots of the relevant variables between the DHT coupled and the reference simulation in logarithmic scale after 300 iterations. Cl and calcite are omitted from these plots since at the end of the simulations they are almost completely constant. We show the raw 6_6 and log 5_5 cases respectively, which are both marked in italics in Table 1. These are cases where the inaccuracy of the end results is acceptable, but already significant; it may quickly diverge after more iterations than the 300 considered in our scenario.
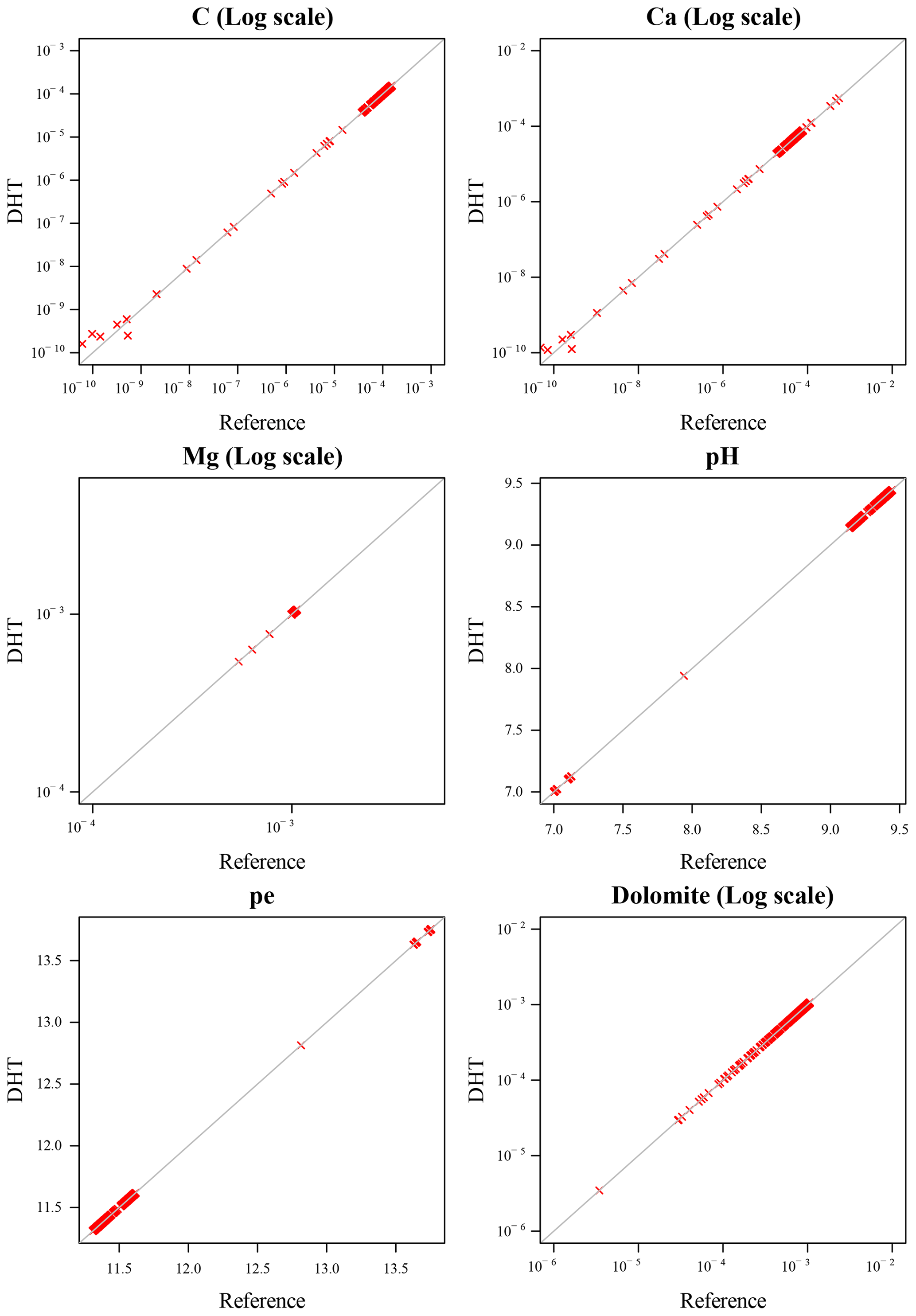
Figure 9Raw variables, 6_6 digits: scatterplot of DHT and reference variables after 300 iterations. While results of the DHT simulations are accurate enough, discrepancies are evident for small values of the variables.
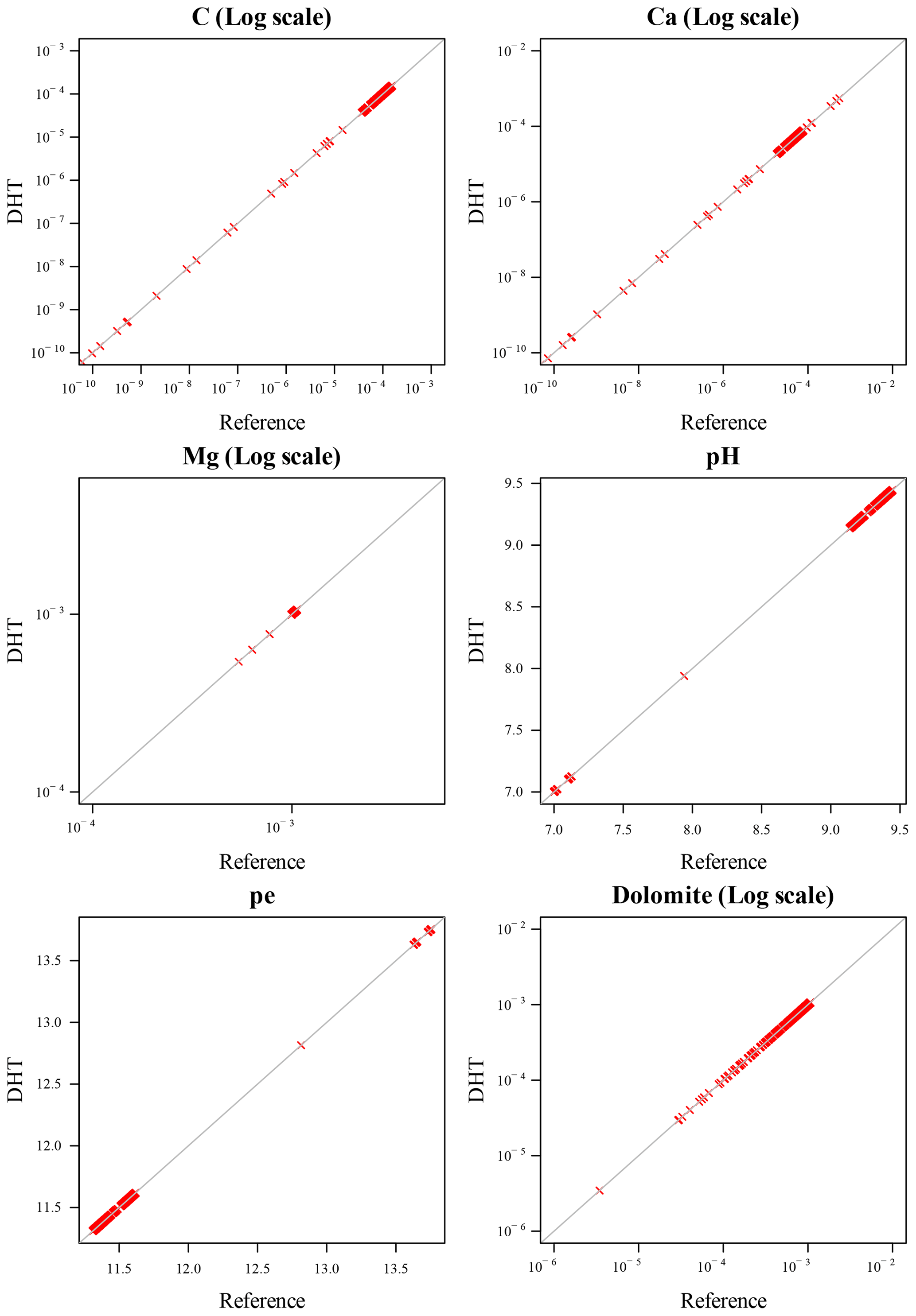
Figure 10Logarithmic variables, 5_5 digits: scatterplot of DHT and reference variables after 300 iterations. With only five digits for the logarithmic variables, the DHT simulations maintain excellent accuracy also for small variables values, as opposed to the case displayed in Fig. 9.
For the raw hashing with 6 digits for both variable classes in Fig. 9, only the small values of C and Ca depart from the corresponding values in the reference simulations. However, such a discrepancy is only appreciable for values lower than 10−9, whose “physical meaning” can already be assimilated to 0. The scatter plot of Fig. 10, for the case of hashing of the first 5 digits of logarithmic variables, shows no inaccuracy even for the smallest values of C and Ca, down to 10−10.
Based on this preliminary study, the DHT with logarithm and 5 significant digits can be retained as accurate enough for the given chemistry.
4.2 Performance evaluation
In this section we evaluate both the speedup achieved through POET's
master/worker design with non-contiguous domain partitions and the
further speedup achieved when employing the DHT. The flow and
transport sub-processes are within the sequential loop of the master
and contribute significantly to the overall runtime (see
Fig. 1). Since our focus was to improve the
dominating runtime of the Chemistry sub-process, we evaluated and
report only the runtime of the latter, named runtime in
the following. This avoids any influence of the other sub-processes.
So, the time measurements were taken before and after the data
transfer between the R and C++ domain (including all steps in the
bottom row in Fig. 4).
4.2.1 Test bed and design of experiments
All measurements described below were done on the compute cluster “Turing” of the Institute of Computer Science at the University of Potsdam. The cluster consists of 30 compute nodes, each equipped with two Intel Xeon E5-2650v4 with 12 cores and 64 GB of main memory accessible for both CPUs. The compute nodes are connected to each other via one InfiniBand switch. An overview of the hardware and software configuration of the compute cluster Turing is given in Table 2.
Table 2Hardware and software specifications for the HPC test environment “Turing”.
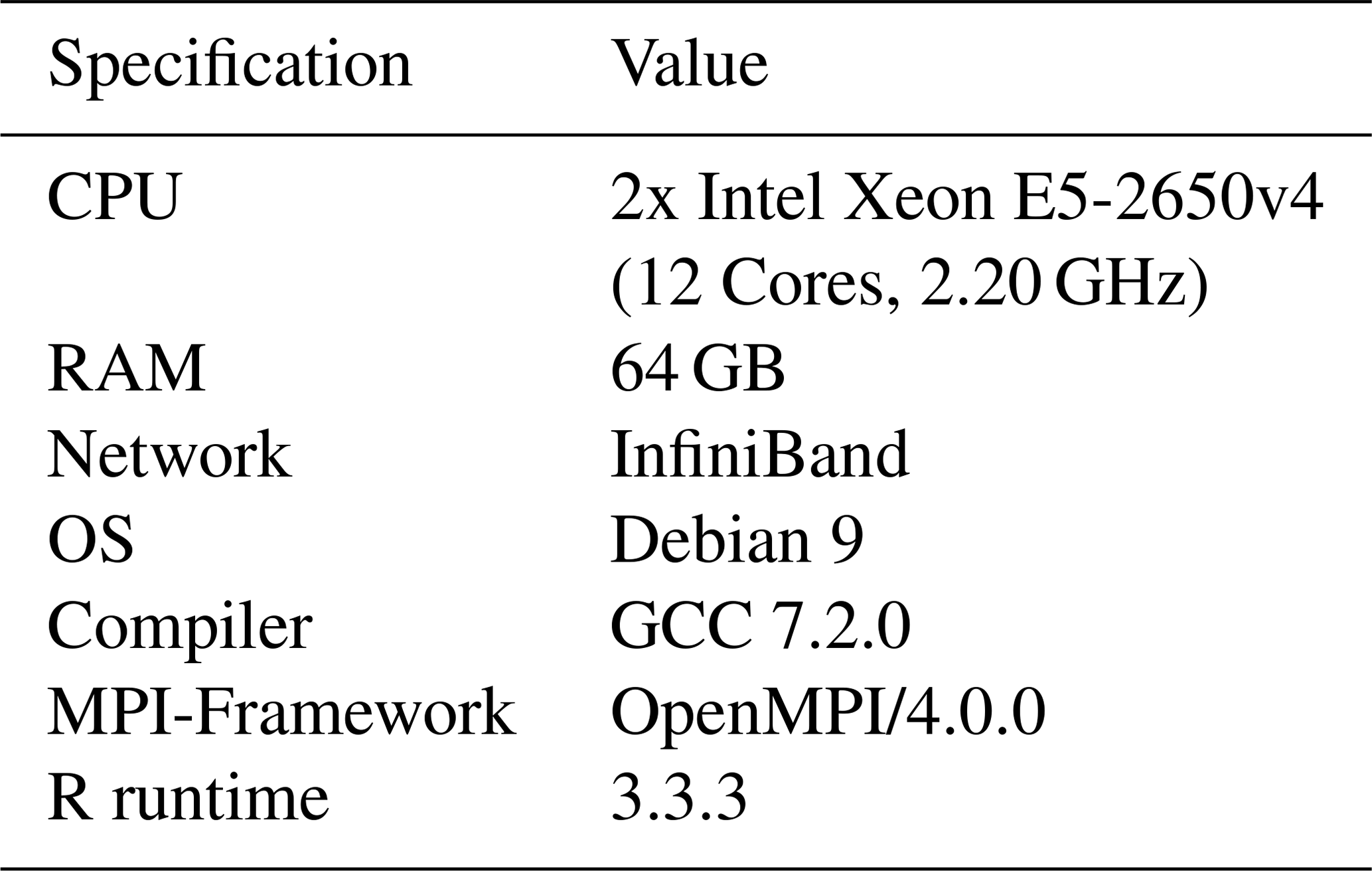
Table 3 shows the design of our experiment. For evaluating the scalability of our parallelization we varied the number of workers from 11 up to 719. Computational resources of up to 1000 runs are not routinely available to geoscientists, and simulations in this class of complexity can be regarded as large scale in this domain, contrary to in computer science. The runtime without DHT using 11 workers is about 25 h. Therefore, each experiment was repeated only 3 times and the median is reported. Since the variation of the measurements was negligible, three repetitions seem to be sufficient for trustworthy conclusions.
Table 3Summary of investigated factors for the performance evaluation of POET in the SimDolKtz benchmark.

In all measurements, the master was running on a dedicated core. In the first experiment only half of the number of cores of one node was used, then all cores of one node (dense mapping), and in the following the number of nodes is doubled until the application is running on all cores of all 30 cluster nodes.
Since we were interested in the benefit of the DHT, we performed the experiment with and without DHT activated. The DHT configuration was the one which has proven to be accurate enough for the given chemistry (see Sect. 4.1). Further, we investigated the influence of different work-package sizes. The varied factors with their values as well as further settings are summarized in Table 3.
4.2.2 Speedup and scaling
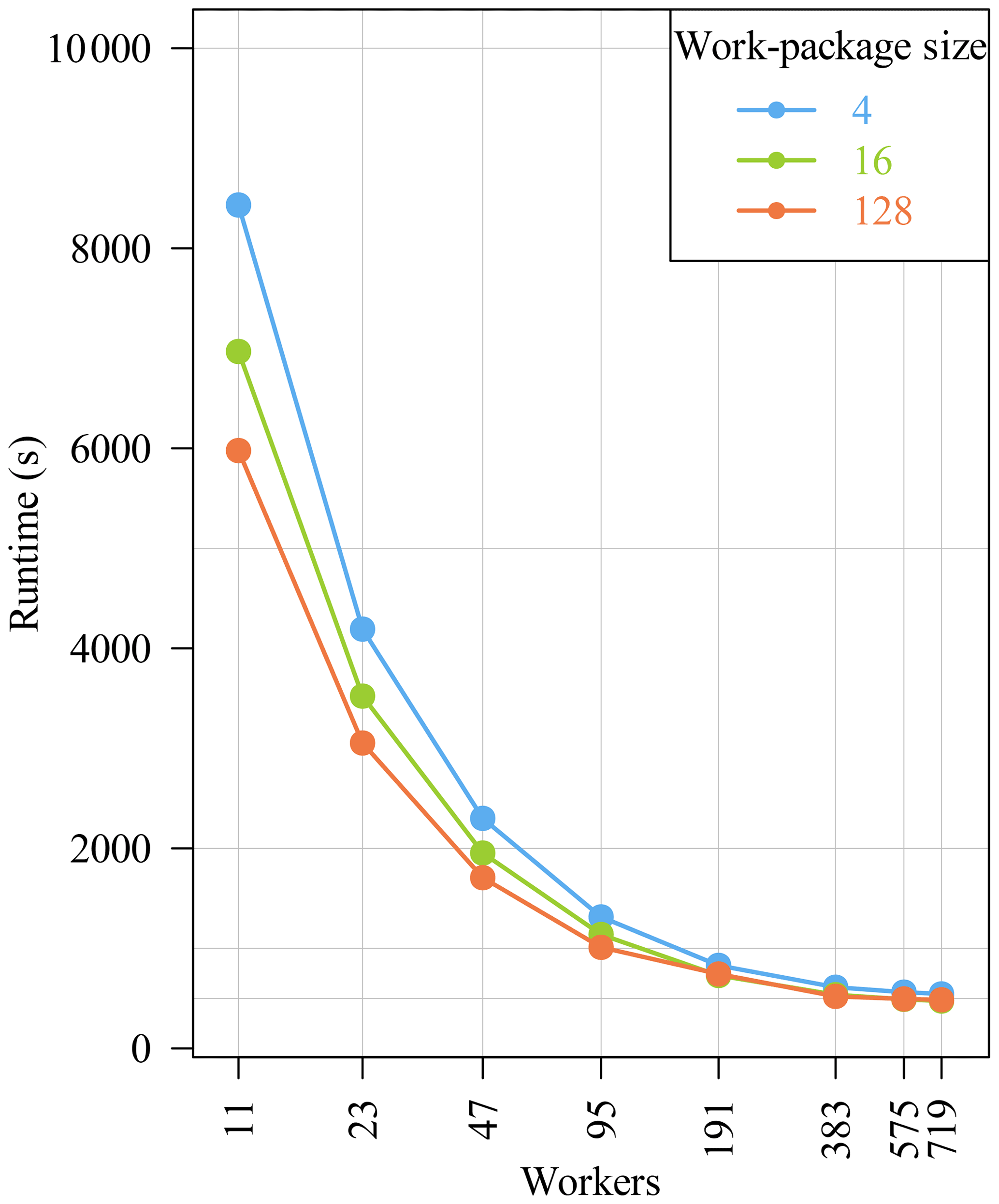
Figure 11 shows the median of the runtime in
seconds for different worker counts. Both axes are in log scale. POET
shows indeed a good linear scaling: the master/worker parallelization
performs very well. The runtime is reduced from about 23 h on 11
workers to 29 min on 719 workers (work-package size 128).
Furthermore, the benefit of the DHT is clearly visible. The runtime
for 11 workers only by activating the DHT is reduced to about
2 h 5 min. For the biggest run where the complete cluster is used,
the runtime is reduced to about 8 min with DHT.
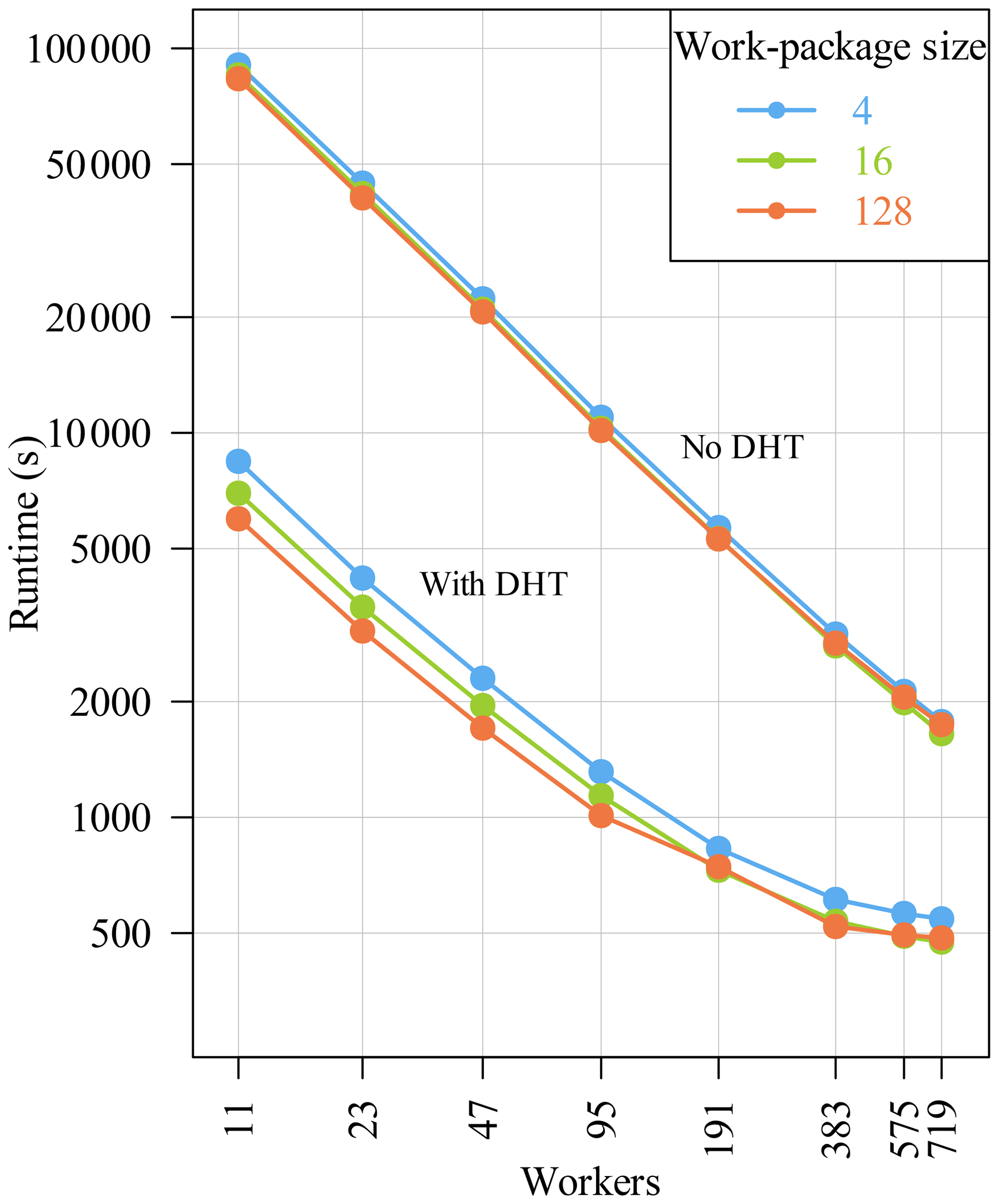
Figure 11POET's runtime with and without DHT activated and for
different work package sizes (both axes in log scale).
The runs with DHT are much faster but do not scale as well as the runs without DHT. In Fig. 12 we zoom into the runtime results with activated DHT. In this figure only the x axis is in log scale. It can be seen that there is only little improvement when using more than 191 workers. Figure 13 shows the corresponding speedup compared to our base measurement with 11 workers: , calculated for each work-package size. Since we approximately double the number of workers on the x axis, the expected ideal speedup also doubles. Figure 12 confirms this expectation for 23 workers and for 47 workers where the speedup is about 2 and 3.6, respectively. For higher worker numbers, the speedup diverges from the ideal speedup.
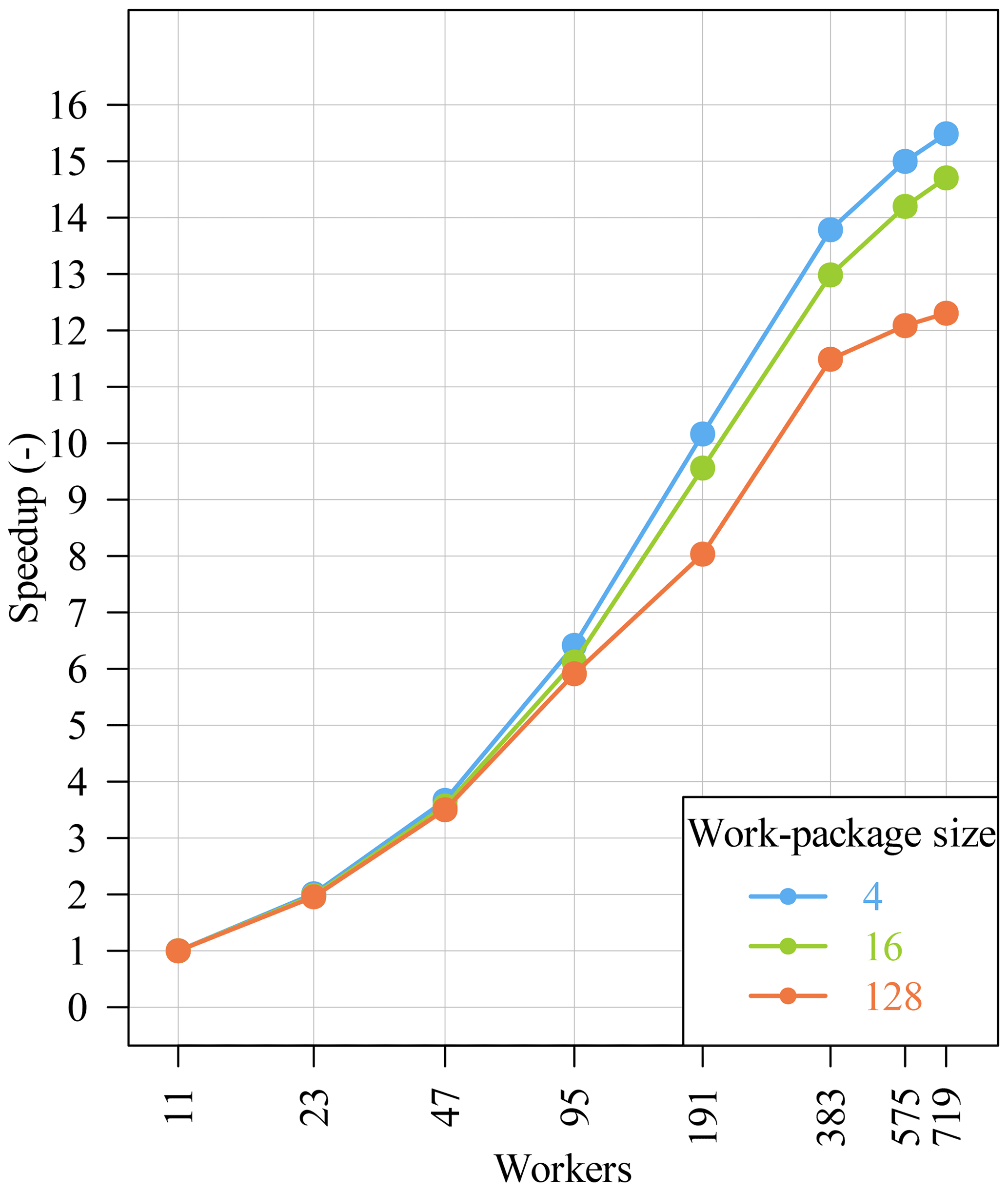
The speedup for the work-package size 128 is lower than for size 4 and 16, but this derives from the fact that the run with work-package size 128 on 11 workers is much faster than with the other work-package sizes, and therefore there is not much space for improvement/speedup anymore. All three speedup curves in Fig. 13 have in common that the speedup converges towards a constant. The reason for this behavior may be an increasing parallelization overhead compared to the simulation grid size or a non-negligible sequential fraction. For example, when the number of worker increases, the synchronization overhead within the DHT library increases. But there are lots of other factors which have an influence on the performance. To investigate this in more detail, we calculated the corresponding Karp–Flatt metric (Karp and Flatt, 1990):
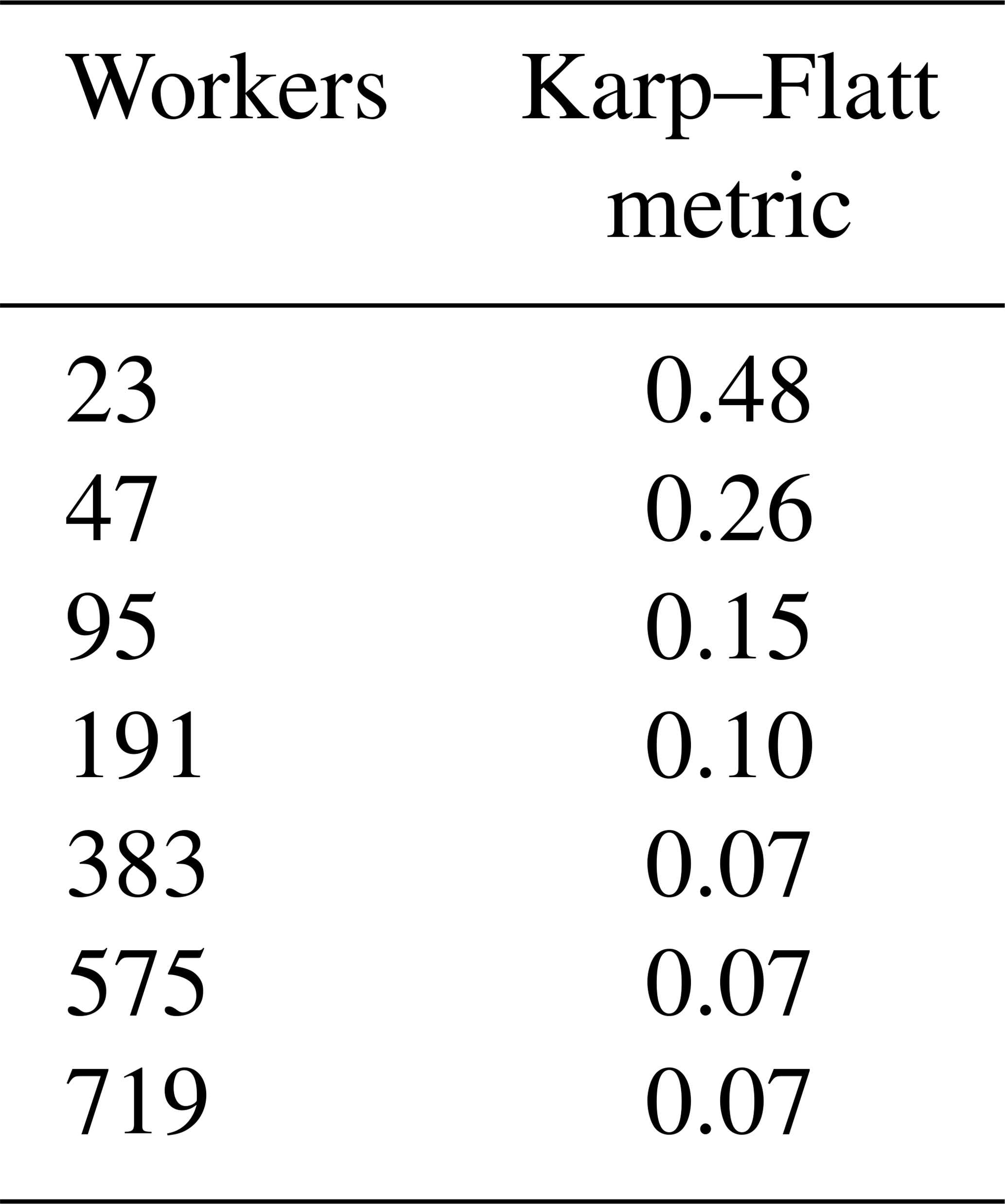
In Table 4 we show the Karp–Flatt metric for work-package size 16. Since the Karp–Flatt metric is getting constant, this indicates that there is a sequential component within the application which limits further scaling. For work-package size 16, this fraction is equal to 7 %. With a sequential fraction f=0.07, we deliver an asymptotic speedup of from Amdahl's law. This explains the course of the speedup curves.
Table 4Karp–Flatt metric with activated DHT and work package size 16.
To confirm this observation, we instrumented the POET code with
additional time measurements. The master spends about 2 s of each iteration
in the data transformation from the R to the C++ domain and
vice versa. So, after 200 iterations about 400 s of the runtime is
contributed by this data transformation. Starting with 11 workers, the
runtime with DHT activated was about 2 h 5 min. Therefore, about
5.3 % of the sequential fraction comes from the data transformation.
4.2.3 Influence of work-package size
The work-package size has a clear influence on the runtime. This influence decreases with a higher degree of parallelism, i.e., a larger number of workers. For all three tested work-package sizes, we observed a similar good asymptotic runtime.
There is some overhead associated with the function call of the
chemical solver, due to the need for composing a string buffer
expressing the required computations in PHREEQC's syntax;
this overhead may have a non-negligible influence. For example, for a
node of the Turing cluster and our benchmark configuration, we
approximated the overhead by the following formula:
where x gives the size of the work package. We conclude
that for the chemistry of our benchmark the PHREEQC
simulation time for one cell is only 24 % higher than the base
overhead due to the function call. In the case of 4 cells per
work package, 162 105 calls per iteration will occur (648 420 4),
without DHT usage. In the case of 128 cells within a work package, this
number is reduced to only 5066 PHREEQC calls. This explains
the better performance of the runs with larger work-package size. With
an increasing number of workers more calls are done in parallel, and
this influence tends to vanish.
Regarding an optimal work-package size, our investigations are just at the beginning and in future work it would be necessary to develop support for an automatic setting of a suited work-package size, possibly adjusted dynamically during the coupled simulations.
4.2.4 DHT usage and filling
Each data point is first looked up in the DHT to determine if there is
already a previously simulated result. So there are always
200 × 648 420 = 129 684 000 calls to DHT_Read().
Table 5 gives the hit rates after 200 iterations.
These are obtained by dividing the number of hits by the number of all
DHT reads. The results of all three runs were averaged using the
arithmetic mean. As expected, the influence of the number of workers
and the different work-package size on the hit ratio is minimal. It is
evident that for the SimDolKtz benchmark an enormous amount
of about 94.4 % of the lookups are successful.

Furthermore, we can determine the fill level of the DHT for
SimDolKtz. Key and value each consist of eight input
variables and additionally stored time steps (see
Sect. 3.3). All 9 parameters are stored as double
values. Furthermore, there are 72 bits of management data per bucket.
This results in
9 × 2 × 64 bits + 72 bits = 1224 bits per
bucket. From Table 5, we can conclude that about
(129 684 000 × (1 − 0.944)) × 1224 bits ≈ 1035 GB of memory is occupied over the entire runtime. It
follows that even for the smallest configuration with 11 workers, the
DHT is filled only to
%. As the number
of workers increases, the total memory available to the DHT will too,
so that the fill level will decrease further.
Finally, we include a note on the number of evictions. Due to the experiment
design, we did measurements with activated
DHT. Only during 5 of these 72 measurements did an eviction occur.
The maximum number of observed evictions during one run was three.
Hence, the DHT size is an important tuning parameter to reduce POET's
memory demand and should be adapted, fitting to the scenario which the
user wants to simulate.
The scientific simulator POET has been developed to serve as a test bed
for novel ideas aiming to increase the computational efficiency of
parallel reactive transport simulations, with specific focus on the
geochemistry sub-process. This project can be further improved
from the standpoint of both technical implementation and the offered
capabilities. In particular, the blend of high-level language R and
more efficient but more implementation-heavy C++, while offering a
high flexibility for quick algorithmic prototyping, shall be
progressively refined in favor of the latter, hence removing
significant bottlenecks. Nevertheless, it is already possible to
highlight some remarkable results from the algorithms and numerical
experiments presented in this work. To our best knowledge, POET
represents the first implementation of dynamical load distribution
architecture via a master/worker model specifically for reactive
transport simulations, whereas a similar concept had already been
discussed by He et al. (2015).
Different parameters pertaining POET's parallelization and DHT are
left for the user to set in absence of a reliable way of determining
their optimum at runtime. We refer here in particular to the
work-package size and to the rounding applied to each input variable
before hashing. For the rounding in particular, which is an extremely
problem-dependent parameter, we recommend a workflow in which
different DHT roundings are tested on smaller (and hence quickly
computed) domains in order to assess their influence on the results,
and large runs are only started once the least number of digits that do not lead to
significant discrepancies with respect to reference (i.e., simulations without
DHT) are identified. A conservative default setting is used by POET
if the user does not specify otherwise, but it may be suboptimal,
leading to unnecessary filling of the table and larger runtimes.
We stress the fact that the caching approach is completely
problem-agnostic and hence applicable in any reactive transport code,
and further in any coupled simulator where sub-processes are expressed
in terms of input/output variables. The available RAM is the only
limiting factor. Enabling DHT partially transforms a computationally
intensive problem into a memory-intensive one, where each worker
process reserves some RAM devoted to the local DHT portion. At the
moment, POET's DHT implementation has no advanced memory management:
once the reserved RAM has been filled with simulation data, the DHT
acts as a LIFO (last in, first out) buffer to accommodate new records.
This aspect needs further implementation work in order to enable
either a FIFO (first in, first out) approach or preferential
discarding of records following a usage metric. However, the
SimDolKtz test case was run with only 1 GB RAM assigned to
each worker for the local DHT, which is quite a small amount for
recent workstations or for cluster nodes, and even in the most
unfavorable case (with 11 workers plus the master process) the DHT
was filled at most to 10 %. This of course can vary with more complex
chemistry requiring storage of more variables and most of all with
many more coupling iterations. A considerable advantage of the DHT
approach is that query and retrieval of data will scale very well, also
when storing many more variables than those used in this work, a
benefit due to the key-value format of the table. Hence, the speedup
achievable with DHT caching will be even more pronounced for more
complex chemistry. In the case of runs on hundreds of thousands of cores, which
is outside the scope of the present work, it will be interesting to
investigate different software architectures, for example by
dedicating some nodes exclusively to DHT and some cores to geochemical
computations.
In the current POET version we chose a rather simplistic approach for
the coupling of chemistry, in which all “state variables” completely defining
the chemical problem (aqueous concentrations and mineral
amounts) and the corresponding outputs are saved. It is possible to
spare DHT space by recasting the results of the chemical problem in
terms of the actually independent variables (i.e., storing reaction
rates within the time step along with pH and pe and the Δt), and
to back-calculate the changes in total elemental concentrations
(De Lucia and Kühn, 2021a). Such an approach, possibly in combination with scaling
relationships such as those proposed by Klein et al. (2013) and
De Lucia et al. (2015), could also be beneficial in case of spatial
heterogeneity not only of porosity and water saturation, but for the
chemical process itself. This is, however, quite a complex task, since
the particular definition of kinetic laws and the choice of the
relationships used to update parameters such as specific reactive
surfaces, which we did not consider in the present work, directly
affect how the “chemical heterogeneity” can be treated to optimize
the speedup through a DHT. An advance in this regard would be
particularly interesting since it is trivial to understand that the
DHT is particularly suitable for simulations starting from a
chemically homogeneous initial state and where smooth reactive fronts
propagate within the domain. In this sense, the DHT includes and
generalizes to parallel environments the compression algorithm devised
by De Lucia and Kühn (2013) with the added benefit of including all
previous iterations in the “compression”. The initially homogeneous
case is in itself a simplification commonly observed in the praxis of
reactive transport and is determined on one hand by the lack of
knowledge about the underground, which can only be attacked by Monte
Carlo studies, and on the other by the large computational cost
associated with each coupled simulation, which makes those Monte Carlo
studies unfeasible. POET, aiming to mitigate precisely these
aspects, can serve as the basis for further developments and research. In
particular, the DHT approach is flexible and can be easily adapted to
any particular problem and strategy, i.e., also storing partial results
such as species concentrations, partition coefficients or mineral
saturation indices, if explicitly required by the chemical problem in
the simulations, with relatively simple additional programming.
Furthermore, the dump and restore capability already implemented in
POET's DHT allows new simulations to be started with a DHT already filled
by previous runs, potentially saving enormous runtime if for example
testing the effects of changing boundary conditions or permeability
distributions, given the corresponding MUFITS simulations are
available.
The order of execution of each work package in POET is inherently
non-deterministic, and this fact leads to slightly different speedups,
hit ratios and results observed in repeated runs when running with DHT
active, since the DHT is also non-deterministically filled. This issue
is unavoidable, due to the dispatch of work packages on a first come,
first served basis; it is, however, very moderate, and the advantage
given by dynamic load distribution outweighs it by ensuring an
efficient hardware usage. With appropriate rounding, the results of
the simulations with DHT display insignificant differences with respect to the
reference and can thus be fully relied upon.
Overall, with enabled DHT we were able to run 200 coupling iterations
on a 650 000-element domain (SimDolKtz test case) in under
6000 s using 11 workers. The corresponding reference simulation with
no DHT took almost 83 000 s, which is more than 14 times slower. This speedup
puts the use of DHT in the same tier as other acceleration
strategies such as surrogate modeling (Jatnieks et al., 2016; Laloy and Jacques, 2019; Prasianakis et al., 2020; De Lucia and Kühn, 2021a) and the on demand machine learning approach of REAKTORO (Leal et al., 2020; Kyas et al., 2020). In
particular, the caching via DHT is an algorithm which, once
implemented in the coupled simulator and tuned for the problem at
hand, does not require training of complex surrogates but works
out of the box. Furthermore, it scales well for both parallel
simulations – at least in the scope of our experiments up to 720
cores, which can be considered of large scale for the geoscientific
practitioner – and for more complex chemistry, since it is not
affected by the curse of dimensionality. Nevertheless, it should be
regarded as one tool in the arsenal of the scientist and not as an
alternative.
In the next development steps, along with the abovementioned
technical improvements resulting from the reimplementation in native
C++ of some R routines, we envisage notably the adoption of
geochemical surrogate models for chemistry (De Lucia et al., 2017; De Lucia and Kühn, 2021a, b), which the interface to high-level
language R makes straightforward. This will allow a direct comparison
between surrogate and POET's DHT as well as their composition. A
further technical improvement will be the substitution of the R-driven
PHREEQC coupling with the direct phreeqcRM module
(Parkhurst and Wissmeier, 2015) or with a different and more efficient
geochemical engine altogether, such as REAKTORO (Leal, 2015). A
promising extension to the DHT caching would be the application of the
first-order Taylor correction as implemented in REAKTORO
(Leal et al., 2020). This would potentially minimize the error introduced
by approximated lookup while presenting a trade-off between the number
of variables stored into the table (the sensitivities must also be
stored), but with less overall and much more frequently reused
entries. A reimplementation of the flow sub-process, which is
currently externally precalculated using the MUFITS simulator and
therefore lacking feedback between chemistry and hydrodynamics, is
under consideration. Already available multiphysics packages such as
MOOSE (Permann et al., 2020) or simulators such as OpenGeoSys
(He et al., 2015) or TRANSE (Kempka, 2020) may be suitable to this
end.
POET is a successful example of interdisciplinary cooperation.
Bringing together competences from different scientific domains makes
it possible to achieve rapid and decisive technical progress and solve
both practical and scientific problems more efficiently.
POET's master/worker architecture with non-contiguous grid
partitioning represents a highly effective way to increase the
computational efficiency of parallel coupled simulations. Namely, it
ensures optimal load balancing by scattering the computational burden of
cells invested by a reactive front across several work packages, and
hence reducing the disparity of CPU time required by the solution of
each work package. The Karp–Flatt metric is a useful method to
investigate the scaling behavior of an implementation. Our experiments
show that the linear speedup observed in POET is only limited by the
sequential part of the code, which can be further improved by a native
C implementation avoiding the data transfer between the R runtime and
the C/C++ domain.
Furthermore, we described an original implementation of fast DHT lookup to cache the results of geochemical sub-process simulations, enabling their reutilization in subsequent work packages and iterations. Our DHT implementation makes use of fast one-sided MPI communication, in turn based on RDMA, and can be included as a library in any application in which processes are expressed in terms of input and output tables; it is hence not limited to geochemistry. Since by definition a DHT indices only exact combinations of input variables, adjusting the rounding for each of these variables achieves an approximated lookup with further speedup benefit at the price of negligible accuracy loss. The optimal rounding for each variable, however, depends on the geochemical problem at hand, and it is hence left to the modeler to ensure adequate tuning of these parameters.
POET represents a foundation upon which it is possible to prototype
and test novel algorithms, although currently with severe limitations
regarding the implemented physics, most notably the lack of feedback
between chemistry and hydrodynamics. However, POET allows reactive transport models as large as SimDolKtz to be computed on single
multi-cores machines in a realistic time, while compute clusters
undoubtedly have no practical alternative for very large and long-term
problems. The architecture of POET ensures that the same code base
efficiently runs on both systems, which is an invaluable practical
benefit in the geoscientific daily praxis. It is our opinion that only
by reducing hardware requirements and computational costs with
algorithmic improvements such as POET's DHT it is possible to perform
the long-term complex reactive transport simulations and the
associated risk and uncertainty analyses connected with subsurface
utilization.
POET's DHT A1 Application programming interface
POET's DHT library offers four operations: DHT_create, DHT_read, DHT_write and DHT_free. All information which
is necessary for the management of the DHT is stored in a data
structure called DHT-object shown in
Listing A1.
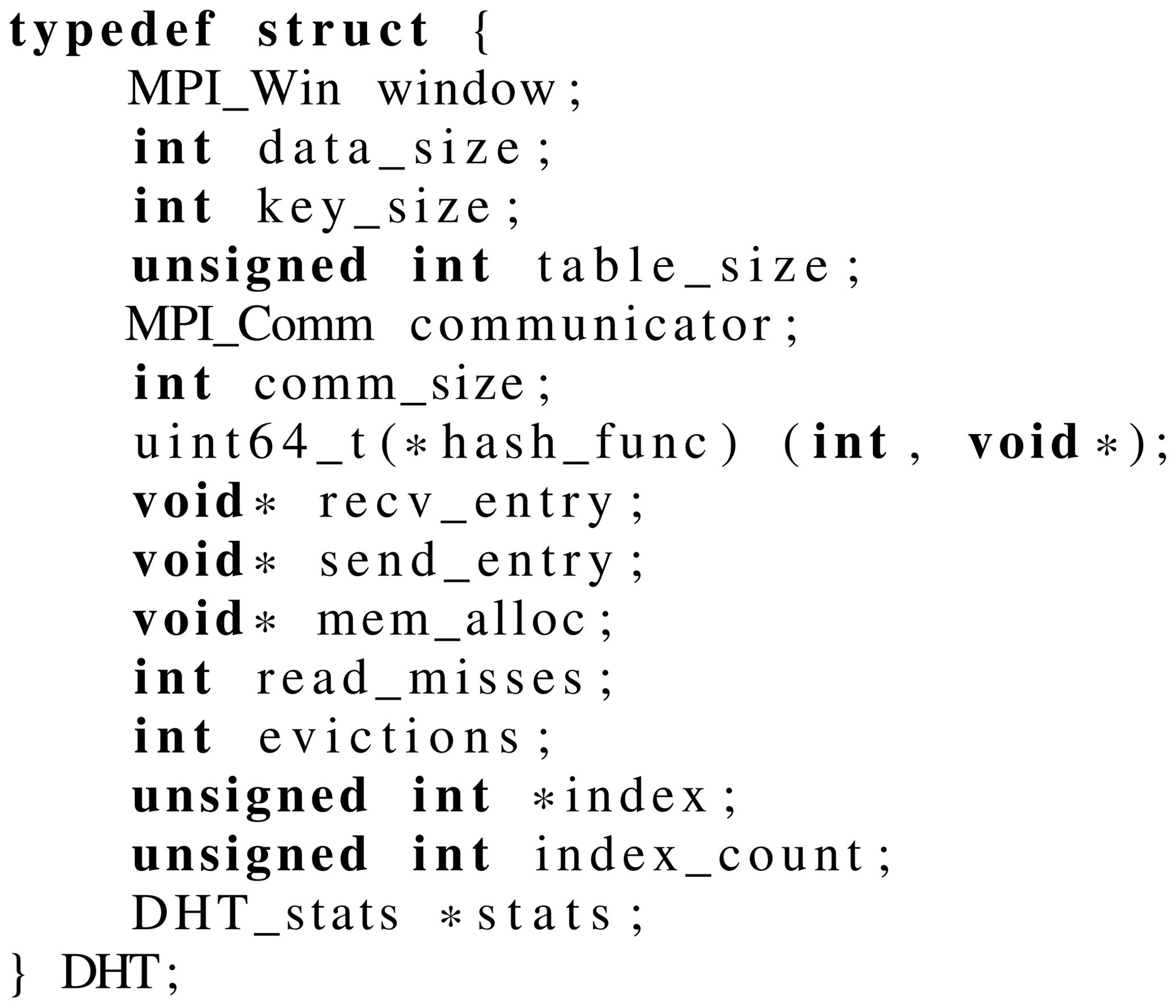
Each worker has its own DHT-object. The first member of this
structure is a handler for the local DHT part. Further, there are
global DHT configuration parameters stored like the data and key size
(lines 3 and 4); i.e., only keys and values with that size or less can
be stored in the DHT. This is due to the fact that the key-value pairs
are saved directly in the hash table. To determine the maximum of
addressable buckets per process the table size per process is stored
in table_size. The hash function in line 8 is used to hash
the keys and is user defined. The struct also has pointers to
intermediate buffers for the data that need to be set or get (in lines 9 and 10). These buffers are pre-allocated per task so there is no
need to allocate memory after the initialization. mem_alloc
in line 11 is the pointer to the allocated memory for the hash table.
The members index and index_count are used for
addressing the correct bucket and for collision resolution. Also there
are counters for evictions, read misses and a DHT_stats
struct for additional evaluations. All variables given above are only
used within the DHT library and do not need to be set or get by the
user.
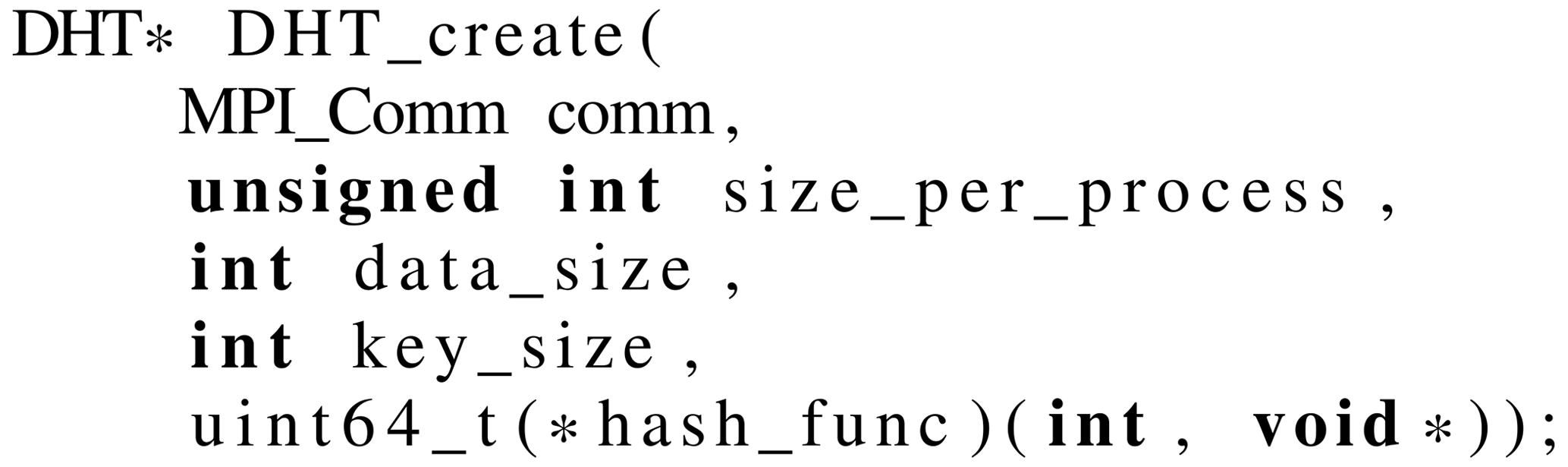
To create a DHT-object the function DHT_create must
be called (Listing A2). DHT_create requires information about the MPI
communicator to address the worker processes, the number of buckets
per worker, and the data and key size in bytes. Furthermore, a pointer
to a hash function must be passed.
When DHT_create is called, the required memory is allocated
and a MPI_Window is created. This allows the execution of
MPI_Get and MPI_Put operations for one-sided
communication. Then the number of indices is calculated and, finally,
all relevant data are entered into the DHT-object which is
returned.
Data can be retrieved using the DHT_read function (Listing A3). This
requires the created DHT-object and two pointers. One points
to the input key and the other to an already allocated memory for the
output data of the function. The data type of the stored elements is
opaque for the DHT. Therefore, both pointers have to be cast to
void before passing them to DHT_read.

At the beginning, the target process and all possible indices are
determined. After that a SHARED lock on the address window
for read access is done and the first entry is retrieved. Now the
received key is compared with the key passed to the function. If they
coincide the correct data were found. If not it continues with the next
index. If the last possible bucket is reached and the keys still do
not match the read error counter is incremented. After the window has
been released, the function returns with a corresponding return value
(read error or error-free read). The data to be read are written to the
memory area of the passed pointer destination.
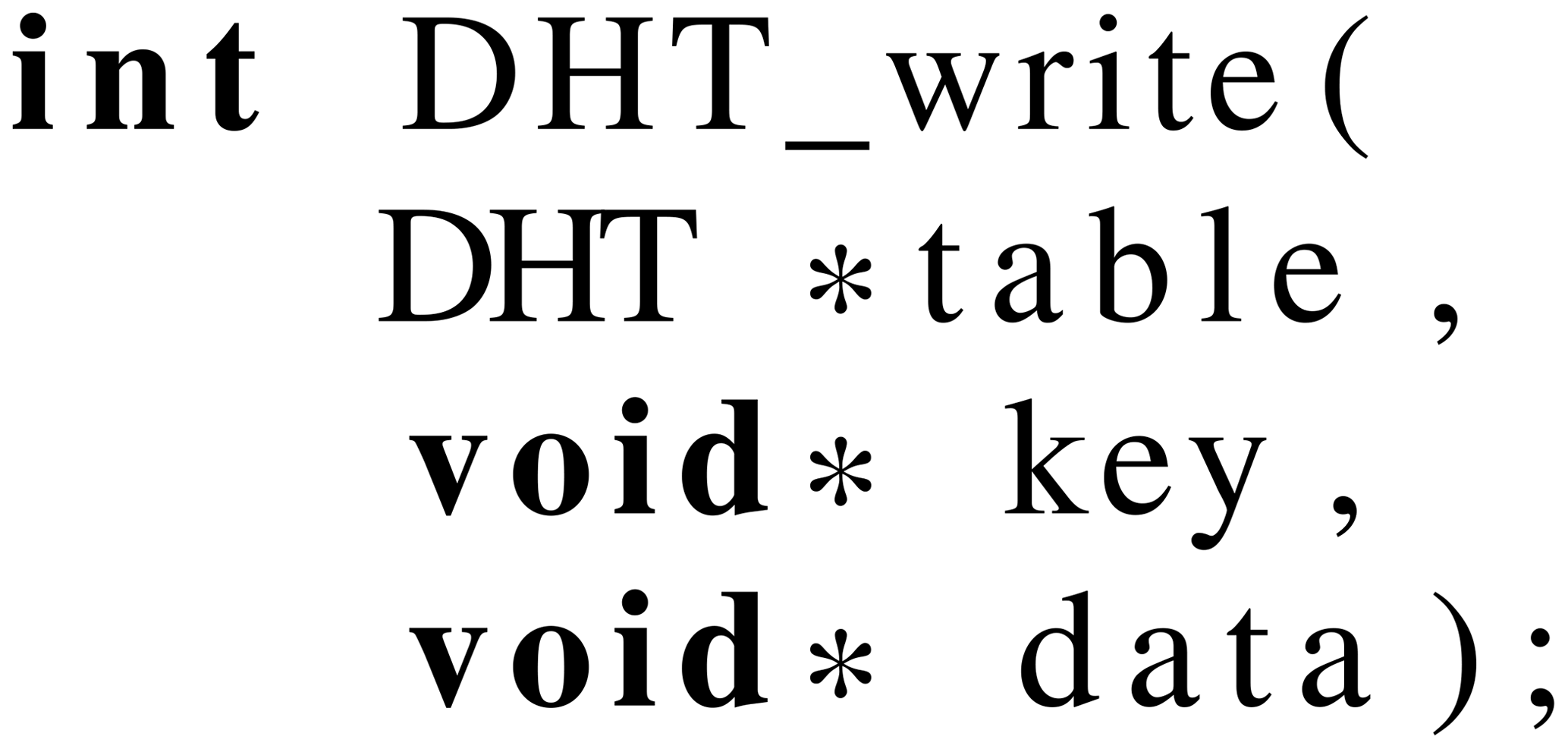
DHT_write writes data into the DHT (Listing A4). The created
DHT-object and pointers to the key and data value must be
provided to the function as input parameters. When DHT_write
is called, the address window is locked with a
LOCK_EXCLUSIVE for write access. Then the first bucket is
read using MPI_Get. If the bucket is still empty or if the
received key matches the passed key, the data are written using
MPI_Put. If the bucket is occupied by a different
(key,value) pair, the function continues with the next index until no
more indices are available. In case all buckets are occupied, an
eviction occurs and the last indexed bucket is replaced. After
successful writing, the memory window is unlocked/released and the
function returns.
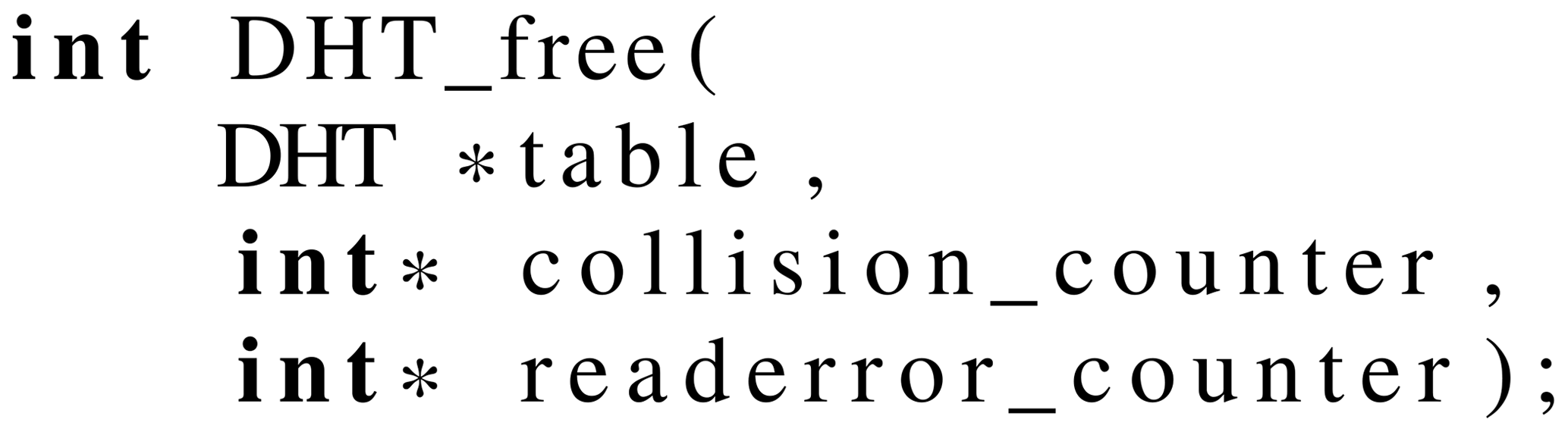
Finally, to free all resources after using the DHT, the function
DHT_free must be used (Listing A5). This will free the
MPI_Window, as well as the associated memory. Also all
internal variables are released. The DHT handle must be passed here as
input as well. Additionally, addresses for storing the values of the
eviction and read error counters are passed.
A2 DHT dump and restore
Besides the basic read or write command there is a possibility to save
the current state of the DHT into a file. This is done by using the
function DHT_to_file. Thereupon all worker processes read
out all written buckets of their local DHT memory area and write them
into the specified file. Thus, after execution of the function a DHT
blob is available, which can be re-read at any time with the function
DHT_from_file. This is useful for checkpoint/restart, and
it also allows the reuse of results from prior simulations for similar
problems.
All read and write accesses to the file are performed via the MPI I/O interface to allow parallel and thus concurrent file operations.
POET is released under GPLv2 and can be downloaded
from Zenodo (https://doi.org/10.5281/zenodo.4757913, Schnor et al., 2021). Upon installation, the SimDol2D test case can be run out of the box.
No data sets were used in this article.
MDL, MK and BS shaped the research. AL, ML and MDL performed the programming and results visualization. ML, MDL and BS validated the results. AL and ML performed the numerical experiments and measured code performance. MDL, ML and BS wrote the manuscript with input from all co-authors. MK and BS provided the funding. All authors have read and agreed to the published version of the paper.
The contact author has declared that neither they nor their co-authors have any competing interests.
Publisher’s note: Copernicus Publications remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
The authors want to thank Max Schroetter for identifying and solving an OpenMPI bug arising when running POET on a single node using shared memory (see bug report: https://github.com/open-mpi/ompi/issues/8434, last access: 29 November 2021).
This research has been partially supported by the Helmholtz Association in the framework of the project “Reduced Complexity Models – Explore advanced data science techniques to create models of reduced complexity” (grant no. ZT-I-0010).
The article processing charges for this open-access publication were covered by the Helmholtz Centre Potsdam – GFZ German Research Centre for Geosciences.
This paper was edited by Xiaomeng Huang and reviewed by Allan Leal and one anonymous referee.
Afanasyev, A.: Hydrodynamic Modelling of Petroleum Reservoirs using Simulator MUFITS, Enrgy. Proced., 76, 427–435, https://doi.org/10.1016/j.egypro.2015.07.861, 2015. a
Afanasyev, A. A.: Application of the Reservoir Simulator MUFITS for 3D Modelling of CO2 Storage in Geological Formations, Enrgy. Proced., 40, 365–374, https://doi.org/10.1016/j.egypro.2013.08.042, 2013. a
Appelo, C. A. J., Parkhurst, D. L., and Post, V. E. A.: Equations for calculating hydrogeochemical reactions of minerals and gases such as CO2 at high pressures and temperatures, Geochim. Cosmochim. Ac., 125, 49–67, https://doi.org/10.1016/j.gca.2013.10.003, 2013. a
Beisman, J. J., Maxwell, R. M., Navarre-Sitchler, A. K., Steefel, C. I., and Molins, S.: ParCrunchFlow: an efficient, parallel reactive transport simulation tool for physically and chemically heterogeneous saturated subsurface environments, Comput. Geosci., 19, 403–422, https://doi.org/10.1007/s10596-015-9475-x, 2015. a
Christgau, S. and Schnor, B.: Design of MPI Passive Target Synchronization for a Non-Cache-Coherent Many-Core Processor, in: Parallel-Algorithmen, -Rechnerstrukturen und -Systemsoftware: 27. PARS Workshop, 4–5 April 2017, Hagen, Germany, vol. 34 of Mitteilungen, Gesellschaft für Informatik e.V., 2017. a, b, c
Damiani, L. H., Kosakowski, G., Glaus, M. A., and Churakov, S. V.: A framework for reactive transport modeling using FEniCS–Reaktoro: governing equations and benchmarking results, Comput. Geosci., 24, 1071–1085, https://doi.org/10.1007/s10596-019-09919-3, 2020. a, b
De Lucia, M. and Kühn, M.: Coupling R and PHREEQC: Efficient Programming of Geochemical Models, Enrgy. Proced., 40, 464–471, https://doi.org/10.1016/j.egypro.2013.08.053, 2013. a, b
De Lucia, M. and Kühn, M.: DecTree v1.0 – chemistry speedup in reactive transport simulations: purely data-driven and physics-based surrogates, Geosci. Model Dev., 14, 4713–4730, https://doi.org/10.5194/gmd-14-4713-2021, 2021a. a, b, c, d, e
De Lucia, M. and Kühn, M.: Geochemical and reactive transport modelling in R with the RedModRphree package, Adv. Geosci., 56, 33–43, https://doi.org/10.5194/adgeo-56-33-2021, 2021b. a, b
De Lucia, M., Kempka, T., and Kühn, M.: A coupling alternative to reactive transport simulations for long-term prediction of chemical reactions in heterogeneous CO2 storage systems, Geosci. Model Dev., 8, 279–294, https://doi.org/10.5194/gmd-8-279-2015, 2015. a, b, c, d, e
De Lucia, M., Kempka, T., Afanasyev, A., Melnik, O., and Kühn, M.: Coupling of Geochemical and Multiphase Flow Processes for Validation of the MUFITS Reservoir Simulator Against TOUGH, Enrgy. Proced., 97, 502–508, https://doi.org/10.1016/j.egypro.2016.10.060, 2016. a
De Lucia, M., Kempka, T., Jatnieks, J., and Kühn, M.: Integrating surrogate models into subsurface simulation framework allows computation of complex reactive transport scenarios, Enrgy. Proced., 125, 580–587, https://doi.org/10.1016/j.egypro.2017.08.200, 2017. a, b, c, d, e
Eddelbuettel, D., Francois, R., and Bachmeier, L.: RInside: Easy embedding of R inside C++ (and C), available at: http://dirk.eddelbuettel.com/code/rinside.html, last access: 25 January 2021. a
Engesgaard, P. and Kipp, K. L.: A geochemical transport model for redox-controlled movement of mineral fronts in groundwater flow systems: A case of nitrate removal by oxidation of pyrite, Water Resour. Res., 28, 2829–2843, https://doi.org/10.1029/92WR01264, 1992. a
Foster, I.: Designing and Building Parallel Programs: Concepts and Tools for Parallel Software Engineering, Addison-Wesley Longman Publishing Co., Inc., Reading, USA, 1995. a
Gerstenberger, R., Besta, M., and Hoefler, T.: Enabling highly-scalable remote memory access programming with MPI-3 One Sided, Sci. Programming-Neth., 22, 75–91, https://doi.org/10.3233/SPR-140383, 2014. a
Guérillot, D. and Bruyelle, J.: Geochemical equilibrium determination using an artificial neural network in compositional reservoir flow simulation, Comput. Geosci., 24, 697–707, https://doi.org/10.1007/s10596-019-09861-4, 2020. a
He, W., Beyer, C., Fleckenstein, J. H., Jang, E., Kolditz, O., Naumov, D., and Kalbacher, T.: A parallelization scheme to simulate reactive transport in the subsurface environment with OGS#IPhreeqc 5.5.7-3.1.2, Geosci. Model Dev., 8, 3333–3348, https://doi.org/10.5194/gmd-8-3333-2015, 2015. a, b, c
Howard, J., Dighe, S., Hoskote, Y. V., Vangal, S. R., Finan, D., Ruhl, G., Jenkins, D., Wilson, H., Borkar, N., Schrom, G., Pailet, F., Jain, S., Jacob, T., Yada, S., Marella, S., Salihundam, P., Erraguntla, V., Konow, M., Riepen, M., Droege, G., Lindemann, J., Gries, M., Apel, T., Henriss, K., Lund-Larsen, T., Steibl, S., Borkar, S. B., De, V., Wijngaart, R. F., and Mattson, T. G.: A 48-Core IA-32 message-passing processor with DVFS in 45 nm CMOS, in: 2010 IEEE International Solid-State Circuits Conference – (ISSCC), 7–11 February 2010, San Francisco, USA, 108–109, https://doi.org/10.1109/ISSCC.2010.5434077, 2010. a
Huang, Y., Shao, H., Wieland, E., Kolditz, O., and Kosakowski, G.: A new approach to coupled two-phase reactive transport simulation for long-term degradation of concrete, Constr. Build. Mater., 190, 805–829, https://doi.org/10.1016/j.conbuildmat.2018.09.114, 2018. a
Jatnieks, J., De Lucia, M., Dransch, D., and Sips, M.: Data-driven Surrogate Model Approach for Improving the Performance of Reactive Transport Simulations, Enrgy. Proced., 97, 447–453, https://doi.org/10.1016/j.egypro.2016.10.047, 2016. a, b
Karp, A. H. and Flatt, H. P.: Measuring parallel processor performance, Commun. ACM, 33, 539–543, https://doi.org/10.1145/78607.78614, 1990. a
Kempka, T.: Verification of a Python-based TRANsport Simulation Environment for density-driven fluid flow and coupled transport of heat and chemical species, Adv. Geosci., 54, 67–77, https://doi.org/10.5194/adgeo-54-67-2020, 2020. a
Kempka, T., Klein, E., De Lucia, M., Tillner, E., and Kühn, M.: Assessment of Long-term CO2 Trapping Mechanisms at the Ketzin Pilot Site (Germany) by Coupled Numerical Modelling, Enrgy. Proced., 37, 5419–5426, https://doi.org/10.1016/j.egypro.2013.06.460, 2013. a
Kempka, T., De Lucia, M., and Kühn, M.: Geomechanical integrity verification and mineral trapping quantification for the Ketzin CO2 storage pilot site by coupled numerical simulations, Enrgy. Proced., 63, 3330–3338, https://doi.org/10.1016/j.egypro.2014.11.361, 2014. a
Klein, E., De Lucia, M., Kempka, T., and Kühn, M.: Evaluation of long-term mineral trapping at the Ketzin pilot site for CO2 storage: An integrative approach using geochemical modelling and reservoir simulation, Int. J. Greenh. Gas Con., 19, 720–730, https://doi.org/10.1016/j.ijggc.2013.05.014, 2013. a
Kyas, S., Volpatto, D., Saar, M. O., and Leal, A. M. M.: Accelerated reactive transport simulations in heterogeneous porous media using Reaktoro and Firedrake, arXiv [preprint], arXiv:2009.01194, 29 October 2020. a, b, c
Laloy, E. and Jacques, D.: Emulation of CPU-demanding reactive transport models: a comparison of Gaussian processes, polynomial chaos expansion, and deep neural networks, Comput. Geosci., 23, 1193–1215, https://doi.org/10.1007/s10596-019-09875-y, 2019. a, b, c
Leal, A. M. M.: Reaktoro: An open-source unified framework for modeling chemically reactive systems, available at: http://www.reaktoro.org (last access: 29 November 2021), 2015. a, b
Leal, A. M. M., Kulik, D. A., and Saar, M. O.: Ultra-Fast Reactive Transport Simulations When Chemical Reactions Meet Machine Learning: Chemical Equilibrium, arXiv [preprint], arXiv:1708.04825, 16 August 2017. a
Leal, A. M. M., Kyas, S., Kulik, D. A., and Saar, M. O.: Accelerating Reactive Transport Modeling: On-Demand Machine Learning Algorithm for Chemical Equilibrium Calculations, Transport Porous Med., 133, 161–204, https://doi.org/10.1007/s11242-020-01412-1, 2020. a, b, c, d, e
Li, T., Zhou, X., Wang, K., Zhao, D., Sadooghi, I., Zhang, Z., and Raicu, I.: A Convergence of Key-value Storage Systems from Clouds to Supercomputers, Concurr. Comp.-Pract. E., 28, 44–69, https://doi.org/10.1002/cpe.3614, 2016. a
Lu, H., Ermakova, D., Wainwright, H. M., Zheng, L., and Tartakovsky, D. M.: Data-informed Emulators for Multi-Physics Simulations, arXiv [preprint], arXiv:2012.15488, 31 December 2020. a, b
Martens, S., Liebscher, A., Möller, F., Henninges, J., Kempka, T., Lüth, S., Norden, B., Prevedel, B., Szizybalski, A., Zimmer, M., Kühn, M., and Group, K.: CO2 Storage at the Ketzin Pilot Site, Germany: Fourth Year of Injection, Monitoring, Modelling and Verification, Enrgy. Proced., 37, 6434–6443, https://doi.org/10.1016/j.egypro.2013.06.573, 2013. a
Maymounkov, P. and Mazières, D.: Kademlia: A Peer-to-Peer Information System Based on the XOR Metric, in: Peer-to-Peer Systems, First International Workshop, IPTPS 2002, 7–8 March 2002, Cambridge, MA, USA, Revised Papers, 53–65, https://doi.org/10.1007/3-540-45748-8_5, 2002. a
Maynard, C. M.: Comparing UPC and One-sided MPI: A Distributed Hash Table for GAP, in: Fifth Conference on Partitioned Global Address Space Programming Models (PGAS 2011), 15–18 October 2017, Galveston Island, Texas, USA, available at: http://pgas11.rice.edu/papers/Maynard-Distributed-Hash-Table-PGAS11.pdf (last access: 29 November 2021), 2011. a
Mellanox Technologies Inc.: Introduction to InfiniBand, White Paper, available at: https://www.mellanox.com/pdf/whitepapers/IB_Intro_WP_190.pdf (last access: 29 November 2021), 2003. a, b
Memcached: High-Performance, Distributed Memory Object Caching System, available at: http://memcached.org/, last access: 29 November 2021. a
Message Passing Interface Forum: MPI: A Message-Passing Interface Standard, Version 3.1, available at: http://www.mpi-forum.org/docs/mpi-3.1/mpi31-report.pdf (last access: 29 November 2021), 2015. a, b, c, d
Monnerat, L. R. and Amorim, C. L.: An effective single-hop distributed hash table with high lookup performance and low traffic overhead, Concurr. Comp.-Pract. E., 27, 1767–1788, https://doi.org/10.1002/cpe.3342, 2015. a
Moortgat, J., Li, M., Amooie, M. A., and Zhu, D.: A higher-order finite element reactive transport model for unstructured and fractured grids, Sci. Rep., 10, 15572, https://doi.org/10.1038/s41598-020-72354-3, 2020. a
Palandri, J. L. and Kharaka, Y. K.: A compilation of rate parameters of water-mineral interaction kinetics for application to geochemical modeling, Tech. rep., USGS Menlo Park, California, USA, available at: https://pubs.usgs.gov/of/2004/1068/ (last access: 29 November 2021), 2004. a
Parkhurst, D. L. and Wissmeier, L.: PhreeqcRM: A reaction module for transport simulators based on the geochemical model PHREEQC, Adv. Water Resour., 83, 176–189, https://doi.org/10.1016/j.advwatres.2015.06.001, 2015. a
Permann, C. J., Gaston, D. R., Andrš, D., Carlsen, R. W., Kong, F., Lindsay, A. D., Miller, J. M., Peterson, J. W., Slaughter, A. E., Stogner, R. H., and Martineau, R. C.: MOOSE: Enabling massively parallel multiphysics simulation, SoftwareX, 11, 100430, https://doi.org/10.1016/j.softx.2020.100430, 2020. a, b
Prasianakis, N. I., Haller, R., Mahrous, M., Poonoosamy, J., Pfingsten, W., and Churakov, S. V.: Neural network based process coupling and parameter upscaling in reactive transport simulations, Geochim. Cosmochim. Ac., 291, 126–143, https://doi.org/10.1016/j.gca.2020.07.019, 2020. a, b
Redis: https://redis.io/, last access: 29 November 2021. a
Schnor, B., Lübke, M., Lindemann, A., De Lucia, M., and Kühn, M.: POET version 1.0 (1.0), Zenodo [code], https://doi.org/10.5281/zenodo.4757913, 2021. a
Shao, H., Dmytrieva, S. V., Kolditz, O., Kulik, D. A., Pfingsten, W., and Kosakowski, G.: Modeling reactive transport in non-ideal aqueous–solid solution system, Appl. Geochem., 24, 1287–1300, https://doi.org/10.1016/j.apgeochem.2009.04.001, 2009. a
Soulaine, C., Pavuluri, S., Claret, F., and Tournassat, C.: porousMedia4Foam: Multi-scale open-source platform for hydro-geochemical simulations with OpenFOAM, Environ. Model. Softw., 145, 105199, https://doi.org/10.1016/j.envsoft.2021.105199, 2021. a
Steefel, C. I., Appelo, C. A. J., Arora, B., Jacques, D., Kalbacher, T., Kolditz, O., Lagneau, V., Lichtner, P. C., Mayer, K. U., Meeussen, J. C. L., Molins, S., Moulton, D., Shao, H., Šimůnek, J., Spycher, N., Yabusaki, S. B., and Yeh, G. T.: Reactive transport codes for subsurface environmental simulation, Comput. Geosci., 19, 445–478, https://doi.org/10.1007/s10596-014-9443-x, 2015. a, b, c
Stockmann, M., Schikora, J., Becker, D.-A., Flügge, J., Noseck, U., and Brendler, V.: Smart Kd-values, their uncertainties and sensitivities – Applying a new approach for realistic distribution coefficients in geochemical modeling of complex systems, Chemosphere, 187, 277–285, https://doi.org/10.1016/j.chemosphere.2017.08.115, 2017. a
Stoica, I., Morris, R. T., Liben-Nowell, D., Karger, D. R., Kaashoek, M. F., Dabek, F., and Balakrishnan, H.: Chord: a scalable peer-to-peer lookup protocol for internet applications, IEEE/ACM Trans. Netw., 11, 17–32, https://doi.org/10.1109/TNET.2002.808407, 2003. a
Tsukamoto, D. and Nakashima, T.: Implementation and Evaluation of Distributed Hash Table Using MPI, in: Proceedings of the Fifth International Conference on Broadband and Wireless Computing, Communication and Applications, BWCCA 2010, 4–6 November 2010, Fukuoka Institute of Technology, Fukuoka, Japan (In conjunction with the 3PGCIC-2010 International Conference), 684–688, https://doi.org/10.1109/BWCCA.2010.155, 2010. a, b
Wozniak, J. M., Jacobs, B., Latham, R., Lang, S., Son, S. W., and Ross, R. B.: C-MPI: A DHT Implementation for Grid and HPC Environments, Technical Report, ANL/MCS-P1746-0410, available at: https://www.mcs.anl.gov/~wozniak/papers/C-MPI_2010.pdf (last access: 29 November 2021), 2010. a, b
- Abstract
- Introduction
-
POET's architecture and DHT implementation - Benchmarks definition
- Results
- Discussion
- Conclusions
-
Appendix A: Further details on
POET's DHT - Code availability
- Data availability
- Author contributions
- Competing interests
- Disclaimer
- Acknowledgements
- Financial support
- Review statement
- References
- Abstract
- Introduction
-
POET's architecture and DHT implementation - Benchmarks definition
- Results
- Discussion
- Conclusions
-
Appendix A: Further details on
POET's DHT - Code availability
- Data availability
- Author contributions
- Competing interests
- Disclaimer
- Acknowledgements
- Financial support
- Review statement
- References