the Creative Commons Attribution 4.0 License.
the Creative Commons Attribution 4.0 License.
 | 01 Jul 2025
| 01 Jul 2025
Quantifying the oscillatory evolution of simulated boundary-layer cloud fields using Gaussian process regression
Philip H. Austin
Average properties of the cloud field, such as cloud size distribution and cloud fraction, have previously been observed to evolve periodically. Identifying this behaviour, however, remains difficult due to the intrinsic variability within the boundary-layer cloud field. We apply a Gaussian process (GP) machine-learning model to the regression of the oscillatory behaviour in the statistical distributions of individual cloud properties. Individual cloud samples are retrieved from high-resolution large-eddy simulation, and the cloud size distribution is modelled based on a power-law fit. We construct the time series for the slope of the cloud size distribution b, a slope that is consistent with satellite observations of marine boundary-layer clouds, by observing the changes in the slope of the modelled cloud size distribution. Then, we build a GP model based on prior assumptions about the cloud field following observational studies: a boundary-layer cloud field goes through a phase of relatively strong convection where large clouds dominate, followed by a phase of relatively weak convection where precipitation leads to formation of cold pools and suppression of convective growth. The GP model successfully identifies the oscillatory behaviour from the noisy time series, within a period of 95±3.2 min. Furthermore, we examine the time series of cloud fraction fc and average vertical mass flux , whose periods were 93±2.5 and 93±3.7 min, respectively. The oscillations reveal the role of precipitation in governing convective activities through recharge–discharge cycles.
- Article
(9492 KB) - Full-text XML
- BibTeX
- EndNote




Cumulus convection plays a central role in regulating the moisture and energy budget in the atmosphere. However, representing the effect of moist convection remains difficult for general circulation and weather prediction models (Bony and Dufresne, 2005; Bony et al., 2006); for example, the cloud radiative feedback remains the largest source of uncertainty in the estimates of equilibrium climate sensitivity (Ceppi et al., 2017; Mauritsen and Roeckner, 2020; Zelinka et al., 2020), and radiative effects of moist convection remain poorly constrained. These models make widely differing assumptions about the dynamics and thermodynamics of boundary-layer clouds (Ceppi et al., 2017; Lipat et al., 2018; Myers and Norris, 2016) that cannot be directly resolved.
The resolution required to accurately model shallow cumulus convection, of the order of 10 m in the boundary layer (Sato et al., 2017, 2018), still remains computationally prohibitive (cf. Fig. 2 in Schneider et al., 2017), as short-term simulations of the global climate with spatial resolutions of the order of a few kilometres have only recently been introduced (Stevens et al., 2019). As such, the role of high-resolution large-eddy simulation (LES) models in improving our understanding of convective effects continues to be essential.
To improve the indirect representation of the effects of moist convection, large-scale models of the atmosphere must account for the large variability in the dynamics and thermodynamics of the sub-grid-scale cloud field. For example, a sub-grid-scale radiation scheme that approximates the radiative effects of shallow convection would greatly benefit from having a better estimate of the geometrical structure and the distribution of clouds, which can be used to improve our estimate of the shortwave radiative effects of low clouds (Ceppi et al., 2017). An important aspect of the cloud field in this context is the distribution of cloud sizes (Neggers et al., 2003), which has long been the main topic for observational studies, from aircraft measurements and satellite imagery (Benner and Curry, 1998; Berg and Stull, 2002; Machado et al., 1992; Machado and Rossow, 1993; Plank, 1969; Peters et al., 2009; Raga et al., 1990; Rodts et al., 2003; Wilcox and Ramanathan, 2001; Zhao and Di Girolamo, 2007) to numerical simulations (Brown et al., 2002; Garrett et al., 2018; Neggers et al., 2003) of the cloud field.
Marine boundary-layer clouds have been observed to organize themselves into cellular patterns (Malkus and Riehl, 1964; Nair et al., 1998; Seifert and Heus, 2013) as a response to the formation of cold pools, formed by evaporative cooling due to precipitation (Zuidema et al., 2012). The cold pools promote the formation of negatively buoyant downdrafts that inhibit further growth of thermals (Seifert and Heus, 2013; Seifert et al., 2015; Seigel, 2014a). At the boundaries of these open cells, convective formation is promoted due to the moistening of downdrafts (Seifert and Heus, 2013) and mechanical lifting due to the convergence of cold-pool outflows (Xue et al., 2008).
These dynamics between the formation of cold pools from precipitation and the subsequent formation of clouds have been observed to manifest as temporal oscillations; the cloud field goes through a phase of relatively weak convection, until multiple downdrafts from the cold pools collide into a convergence zone, where convective growth begins anew. For mesoscale marine boundary-layer stratocumulus clouds, the spatial organization of precipitation is found to be important in promoting subsequent cloud formation and the evolution of open-cell convection (Feingold et al., 2010; Koren and Feingold, 2013; Wang and Feingold, 2009; Yamaguchi and Feingold, 2015). High-resolution large-eddy simulations have shown that the formation of cold pools is the main mechanism that drives organized marine stratocumulus convection, which corresponds well to long-term satellite observations (Bretherton and Blossey, 2017; Seifert and Heus, 2013; Zuidema et al., 2012).
Temporal oscillation has also been observed in modelling studies of precipitating cumulus convection (Dagan et al., 2018; Feingold et al., 2017). For both shallow and deep clouds, the dominant mechanism that drives this oscillatory evolution is found to be the formation of cold pools due to evaporative cooling from precipitation in the sub-cloud layer (Seifert and Heus, 2013; Yano and Plant, 2012; Tompkins, 2001). This mechanism is referred to as the recharge–discharge cycle of thermodynamic instability by Dagan et al. (2018), motivated by Bladé and Hartmann (1993), where the evaporative cooling due to precipitation charges instability in the atmosphere, which is discharged by convection.
Precipitation facilitates both the spatial organization and the temporal oscillation of the cloud field and is governed by a number of factors, including cloud microphysics and cloud layer depth. Aerosols, acting as cloud condensation nuclei (CCN), can influence the cloud microphysics by enhancing the cloud droplet number concentration but suppressing droplet growth (Twomey, 1974), and LES studies have shown that when the aerosol concentration is increased, the cloud layer deepens, which then affects rain formation (Dagan et al., 2017; Seifert et al., 2015). Furthermore, modelling studies have shown that an increase in aerosol concentration influences both the amount and the timing of precipitation; in a polluted environment, the efficiency of precipitation formation is reduced, and as a result, rain formation is suppressed and delayed (Dagan et al., 2018; Seigel, 2014b; Seifert et al., 2015; Yamaguchi et al., 2019).
This study is motivated by these observations of the periodic evolution of the cloud size distribution; if the cloud size distribution evolves periodically over time, the dynamic and thermodynamic properties of the cloud field, such as mass flux and cloud cover, must also oscillate accordingly as the cloud field alternates between the two phases of strong and weak convection. However, numerical algorithms used to detect the period of such oscillations suffer from the presence of noise. Because of this, earlier studies concerning the oscillatory growth of the cumulus field relied on manual inspections (Dagan et al., 2018; Koren and Feingold, 2011) or spectral analysis (Feingold et al., 2017), although an accurate estimate of the period of this oscillatory behaviour is yet to be found. Therefore, we use a kernel-based machine-learning method using the Gaussian process (GP) model and apply it to the regression of the periodicity in the observed time series of the cloud size distribution. GP is a flexible non-parametric Bayesian machine-learning model that is well suited to be used to infer useful information from a noisy dataset.
GP models have been used for this specific purpose in astronomy (Angus et al., 2017) and medical studies (Cheng et al., 2020; Durrande et al., 2016) to estimate the periodicity in a time series with observational noise and extract an underlying trend in the observed data. Likewise, we propose the use of a GP model to obtain the underlying trend of a time series in the presence of observational noise. We use LES model results to sample cloud size densities, construct a cloud size distribution, and follow the evolution of the cloud field properties. Based on the periodic behaviour estimated by the GP model, we re-construct the periodic time series f(x) without noise, which is compared to the original time series of cloud size distribution. Lastly, we repeat the GP regression for mass flux and cloud cover to test our hypothesis.
Details of the LES model run is given in Sect. 2.1. Section 2.2 illustrates how the individual clouds are sampled from the model output. Section 2.3 gives the methods used to construct the time series of the slope b from the cloud size distribution. Section 2.4 examines the traditional Fourier spectral analysis to identify the oscillatory behaviour within the time series. A brief introduction of the GP regression method is given in Sect. 2.5, as well as the construction of kernels, which is further explained in Sect. 2.6, where we present the method used to estimate the periodicity from the time series. The fully Bayesian model used to estimate the uncertainty in the periodicity estimate is given in Sect. 2.7. The results are discussed in Sect. 3 and summarized in Sect. 4.
2.1 Model description
The System for Atmospheric Modeling (SAM; Khairoutdinov and Randall, 2003) version 6.11.8 was used to simulate the CFMIP/GASS Inter-comparison of Large-Eddy and Single-Column Models (CGILS) case (Blossey et al., 2013; Zhang et al., 2013). In this study, we use the large-scale forcing and thermodynamic tendencies of the CGILS S6 regime, representing marine sub-tropical shallow cumulus convection.
The model grid size was set to 25 m in all directions over a 43.2 km × 12.8 km × 4.8 km model domain. This elongated, bowling-alley domain was employed to minimize the effect of periodic boundaries. Because the mean air flows along the elongated axis, most of the convective activity occurs without being spatially recycled as clouds rarely veer from the mean airflow. The temporal resolution of the model was 1 s, and the output was written every minute. We performed a total of 36 h of simulation, although the first 24 h was used for the model spin-up and was therefore excluded from the analysis, and the last 720 time steps for the remaining 12 h of simulation were used for the analysis. A long spin-up time was necessary for the boundary layer to reach (quasi-)stability across the domain. The cloud field was then sampled every minute. Details of conditional cloud sampling are presented in the following section.
Doubly periodic domains were employed with a soft top to exclude gravity waves as the possible cause of oscillatory behaviour (Dagan et al., 2018). A two-moment microphysics scheme (Morrison et al., 2005a, b) was used, although the cloud layer remained shallow within 2 km of the boundary layer, and no ice formation was observed. The microphysics scheme was initialized with a cloud droplet number concentration (CDNC) value of 120 cm−3, which is typical for maritime convection (Rasmussen et al., 2002). Compared to other relevant studies of aerosol–cloud interactions, this represents a relatively pristine environment (Dagan et al., 2018; Seigel, 2014b; Yamaguchi et al., 2019). Other parameters used in the LES model run are based on the CGILS S6 control run (Blossey et al., 2013; Tan et al., 2016; Zhang et al., 2013). A diurnally averaged solar insolation was applied, and both shortwave and longwave radiative effects were calculated using the Rapid Radiative Transfer Model (RRTM) (Clough et al., 2005; Iacono et al., 2008).
To make accurate measurements of vertical mass flux, we implemented the tetrahedral interpolation scheme (Dawe and Austin, 2011). Every time instantaneous cloud fields are sampled, mass flux rates are integrated over a cloudy surface. This is done by interpolating each grid cell using 48 tetrahedrons and calculating the changes in the three-dimensional cloud surface. Recent studies suggest a grid size of roughly 10 m to achieve meaningful statistical accuracy even for shallow convective clouds (Sato et al., 2017, 2018), but the results from the LES model run with 12.5 m grids did not appear to cause significant changes in average vertical mass flux distributions compared to 25 m grids. Since computational resources are limited and keeping a large domain size (and hence a large number of statistically independent cloud samples) and a longer simulation time is more important for the purpose of this study, we only examine the results from the 25 m resolution LES run.
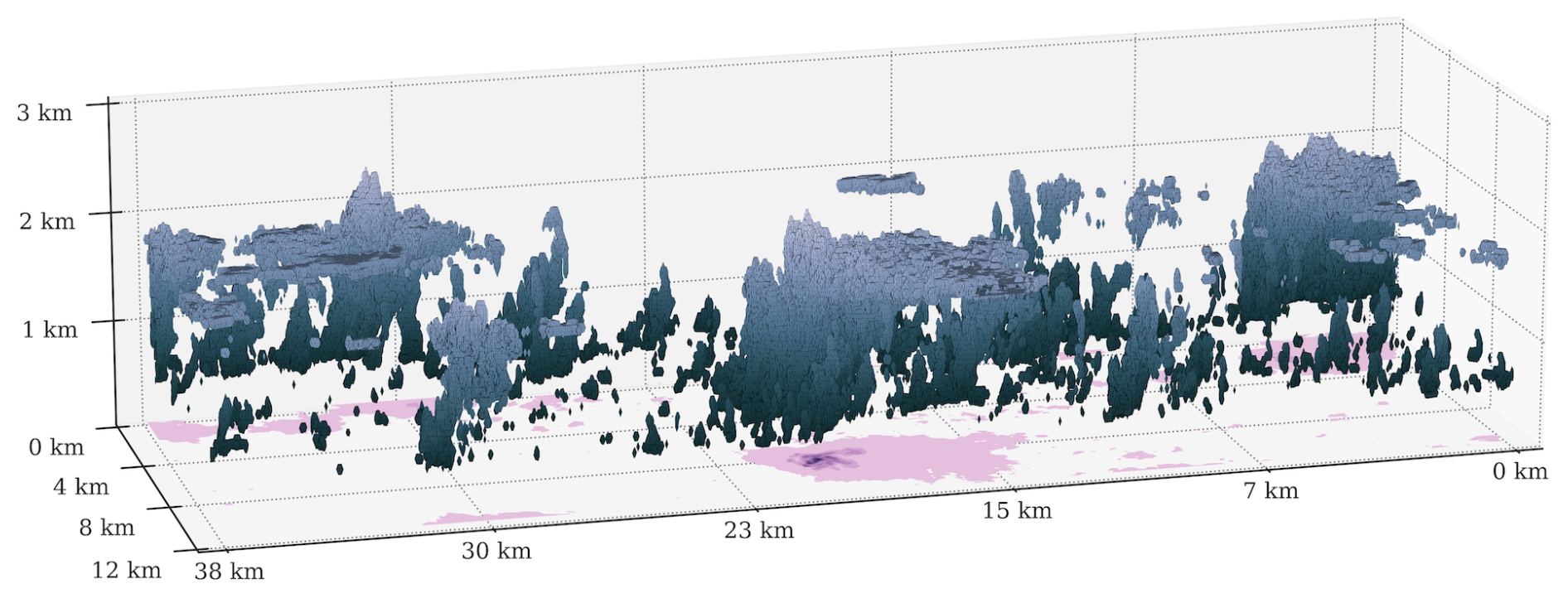
Figure 1A three-dimensional overview of the LES-modelled cloud field from SAM model output, taken 24 h into the simulation. The shaded regions indicate cloudy cells that contain condensed liquid water. The darker regions are low in altitude, and the brighter regions are closer to the cloud top at 2 km. Regions shaded in pink represent areas containing column-integrated precipitable water.
Figure 1 shows a three-dimensional snapshot from the LES model run. Clouds are generally scattered over the model domain, and the distribution of smaller clouds appears to be granular. However, areas of vigorous convective activities accompanying precipitation often form in clusters (right side of Fig. 1) between areas that are either devoid of clouds or dominated by scattered small clouds (middle of Fig. 1). Earlier studies of cloud patterns (Seifert and Heus, 2013; Stevens et al., 2020) have suggested that such gravel-like patterns could be due to the formation of cold pools. Evaporative cooling due to precipitation can form cold pools, and such patterns can manifest as pronounced convective activities followed by a weak, scattered cloudy regime on the leeward side. There are signs of cloud clustering in the simulated cloud field where the strongest convective activities (right side of Fig. 1, for example) mostly occur in clusters.
2.2 Cloud sampling
In order to obtain the cloud size distribution, individual clouds need to be sampled conditionally. In this study, horizontally contiguous regions (grid cells) containing condensed liquid water (ql>0) are considered to be the cloud region. The size of a cloud is then defined as the area of the horizontal cross-section, which is the number of grid cells containing condensed liquid water multiplied by the horizontal grid size (25 m × 25 m). The size distribution contains multiple horizontal cross-sections of the same cloud. However, randomly sampling 60 % of the cloud samples did not result in significant changes in the time series, likely attributable to the sheer number of samples and the shallow nature of the modelled clouds in comparison to the size of the domain, as well as the numerical methods used to reduce the statistical uncertainties.
An alternative method by Neggers et al. (2003) is to vertically project each cloud volume onto a two-dimensional surface. This resembles two-dimensional images taken from a high altitude, which can be useful when comparing the LES output to satellite images, for example. However, the focus of the study is to evaluate the dynamic and thermodynamic properties of the clouds, and simply taking the horizontal cross-section allows us to directly compare the distribution of cloud sizes to that of mass flux. There is another benefit to this approach: when the cloud field is projected onto a two-dimensional surface, the number of smaller clouds sampled from the cloud field increases. This is because smaller clouds are less likely to be projected onto each other. Hence, vertically projected cloud size distribution tends to overestimate the number of smaller clouds, while using a horizontal cross-section (e.g. Brown, 1999) gives a better representation of the realistic three-dimensional cloud size distribution.
Once individual cloud sizes are extracted from the LES output field, we define the cloud size distribution. The cloud size distribution C(a) is a cumulative distribution defined as an integral over the cloud size density c(a). The cloud size density is a type of probability density function (PDF) that defines the probability of a cloud having a certain size.
Typically, the probability density function is calculated using a histogram with a discrete bin size for a piecewise estimate, where the density is defined as the frequency of clouds within each discrete bin. However, the choice of bin size has a large effect on the resulting distribution and can yield different results with qualitatively independent features depending arbitrarily on the choice of bin size.
To alleviate these issues, we use the kernel density estimator (KDE; Parzen, 1962a) to reliably estimate the distribution of cloud size density. A kernel density estimator at a point x given a set of n observations is defined as
which is governed by a kernel function K and its bandwidth h that control the amount of smoothing applied by the kernel.
We will use a Gaussian kernel K(x) for this purpose, defined as
which is used to smooth the cloud size density function. Each cloud size sample is added to a distribution, not as a single point of observation but a probability distribution based on a Gaussian distribution. It can be regarded as an uncertainty in the measurement; that is, each cloud sample is considered to be a Gaussian probability distribution whose width is defined by the bandwidth h.
The KDE integrates these probability distributions of cloud sizes, which gives the cloud size distribution C(a). Figure 2 shows the histogram and the cloud size distribution based on the KDE using cloud samples taken 12 h into the simulation.
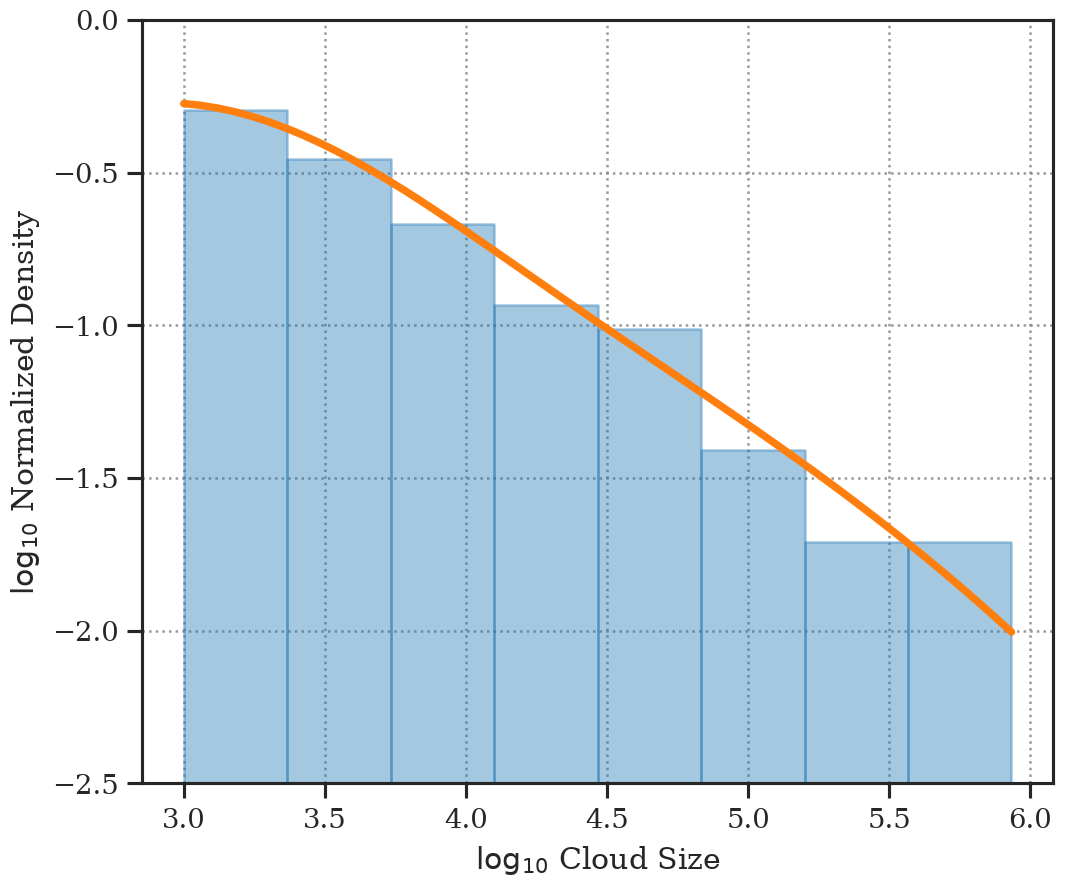
Figure 2A comparison of the histogram (blue) and the kernel density estimate (KDE; orange line) showing log 10 of normalized density based on the cloud size distribution over log 10 of cloud size in square metres.
The cloud size distribution C(a) in Fig. 2 shows a decreasing slope with a scale break for the smallest clouds. The probability density for the smallest clouds is nearly constant. The distribution resembles that of Brown (1999) (cf. Fig. 12 in Neggers et al., 2003) but with a greater number of smaller clouds. This could be because smaller clouds appear near the cloud base, which is lower than the sampling height used in Brown (1999), reproduced in Neggers et al. (2003). Since the cloud samples in Fig. 2 have been taken at all heights, the transition between the smaller and larger clouds appears to be much less abrupt than previously observed.
2.3 Cloud size model
Given the cloud size distribution C(a), a model of the probability density function needs to be constructed in order to study its temporal evolution. In this paper, we use the power-law distribution (Benner and Curry, 1998; Cahalan and Joseph, 1989; Feingold et al., 2017; Kuo et al., 1993; Neggers et al., 2003; Zhao and Di Girolamo, 2007), which has been widely used to represent the observed distribution of clouds. Here, the cloud size density c(a) is defined as a function of cloud size, or
where a is the cross-sectional cloud area in square metres, and c0 is the coefficient used for the power-law fit. Integrating the cloud size density c(a) over all observed cloud sizes a yields the cloud size distribution C(a).
From Fig. 2, we observe that the cloud size distribution can roughly be divided into two parts, defined by a scale break; the cloud density appears to be relatively constant for the smallest clouds before it decreases linearly. This is a useful feature for the purpose of this paper. As smaller clouds are short-lived and their contribution to the upward mass flux M is very small, we are interested in the oscillation between the two phases of the cloud field where there is a relative abundance of intermediate-sized clouds, which contributes the most to the mass flux, and where there is a relative abundance of large clouds, which contributes the most to precipitation and formation of cold pools.
We isolate the (quasi-)linear portion by first taking the derivative of the cloud size distribution C(a). A decision tree regression algorithm (Breiman et al., 1984) is used to divide the distribution into two parts by limiting the maximum number of possible branches to two, corresponding to the portion of the distribution with a relatively constant slope and the rest of the distribution. This is effectively done by fitting a simple piecewise-constant function to the derivative of C(a), as shown in Fig. 3a, where the breakpoint minimizes the error between the distribution C(a) and . For this purpose, we make use of the mean square error (MSE) defined as
for N samples in the cloud size distribution C(a). As shown in Fig. 3a, by minimizing MSE, the decision tree regression algorithm isolates the linear portion of the distribution (green region).
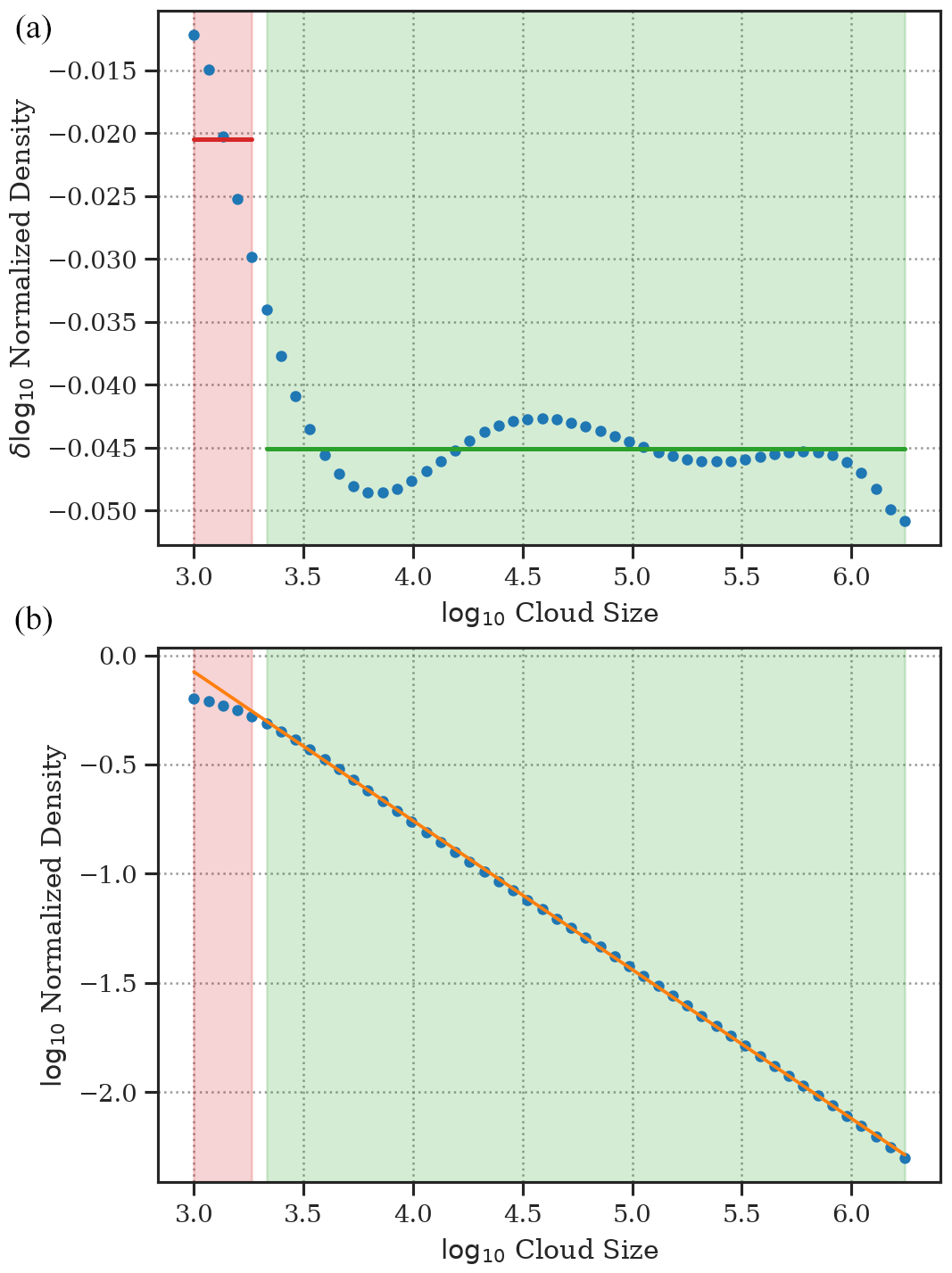
Figure 3The decision tree regression algorithm is applied to the derivative of cloud size distribution (a), which is divided into a region of relatively constant slope (a; green region) and the rest of the distribution (a; red region). The green region is chosen by the algorithm, which is then used to separate the linear portion of C(a) (b; green region) from the non-linear portion (b; red region). The green region, defined as the part of the distribution with a constant slope (b; green region), is used to fit a linear curve (b; orange line), while the rest of the distribution is ignored (b; red region) in order to estimate the slope of the cloud size distribution.
Figure 3b shows how the decision tree splits the distribution based on the derivative of C(a). Once we isolate the relatively linear portion of the distribution, we use the Theil–Sen estimator (Theil, 1950; Sen, 1968) to perform a robust linear regression, which does well in the presence of outliers and small deviations from the linear trend, as seen in Fig. 3a, where the slope represents the ratio between medium-sized and the largest clouds. The cloud size distribution C(a) given in Fig. 3b represents a normalized probability density function, which differs from that of the histograms obtained from observations. Here, the slope is measured to be roughly . We calculated b for non-normalized values of C(a), and the time series is found to vary roughly between −1.4 and −1.7, which corresponds to a range of −0.7 to −0.85 based on the method by Neggers et al. (2003) and −1.7 to −1.85 by Benner and Curry (1998). The measured slopes are slightly smaller in magnitude but comparable to the slope of found in a large-eddy simulation (Neggers et al., 2003) and the slope of from remote sensing observations (Cahalan and Joseph, 1989; Benner and Curry, 1998).
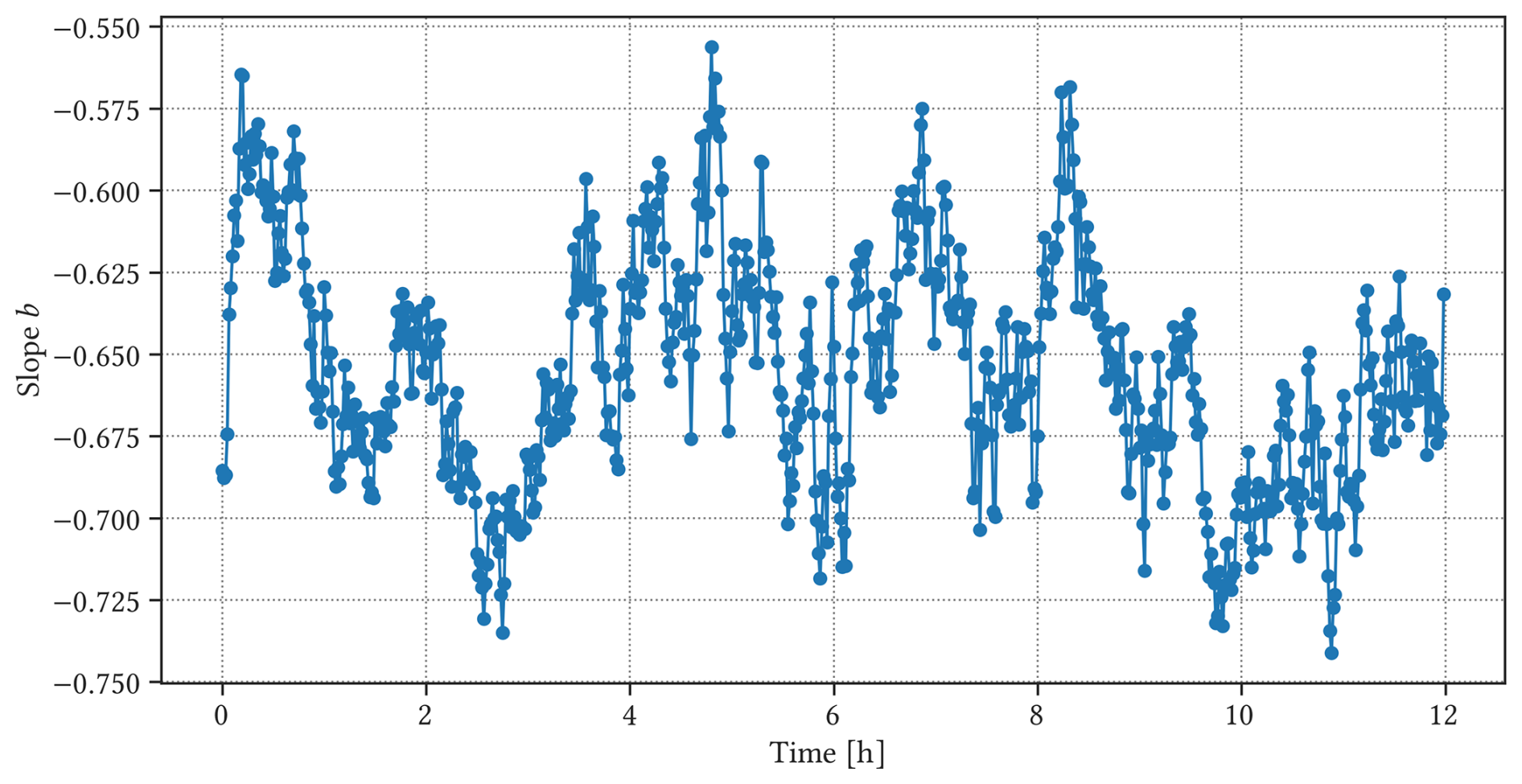
Figure 4The time series of slope b of the cloud size distribution C(a) for the 12 h simulation. The slope is calculated every minute (blue line) for the duration of the entire simulation, but the first 9 h is used to train the GP model.
We repeat the calculation of the slope b for 720 time steps (or the entire duration of the simulation excluding the spin-up time). The resulting time series of the slope b for the cloud size distribution C(a) can be seen in Fig. 4. The use of a robust linear regressor along with a decision tree regression algorithm helps isolate the linear segment of the distribution, which better represents the slope of the size distribution of the cloud field and reduces numerical uncertainties involved in the linear regression to obtain the slope b.
We are interested in determining whether the fluctuations in the time series of the cloud size distribution in Fig. 4 are consistent with a periodic behaviour. The oscillatory evolution in b is not immediately obvious in Fig. 4, and performing an augmented Dickey–Fuller (ADF; Dickey and Fuller, 1979; Hamilton, 1994) test shows that the time series is non-stationary. We would like to quantify the extent to which the time series is consistent with earlier studies regarding oscillations in the cloud size distribution. In the following section, we follow Feingold et al. (2017) and perform Fourier spectral analysis to identify the underlying periodic behaviour in the observed time series.
2.4 Fourier spectral analysis
Given the noisy, non-stationary time series of the slope b(t) (Fig. 4), we tested traditional spectral analysis based on discrete Fourier transform (DFT) to capture possible oscillatory behaviour (Feingold et al., 2017). Here, given a discrete time series for , the corresponding DFT, , can be obtained by
where .
Equation (5) translates the observed time series fk into a function of frequency that is a linear combination of oscillatory, or sinusoidal, components. The strength of each component can then be observed by examining the power spectral density of the time series. The oscillatory components showing the strongest signals represent the dominant modes of oscillation in the observed time series.
The power spectral density for a DFT on a discrete sequence can be estimated by a periodogram, defined as the squared modulus of DFT, or
where for a real-valued input sequence.
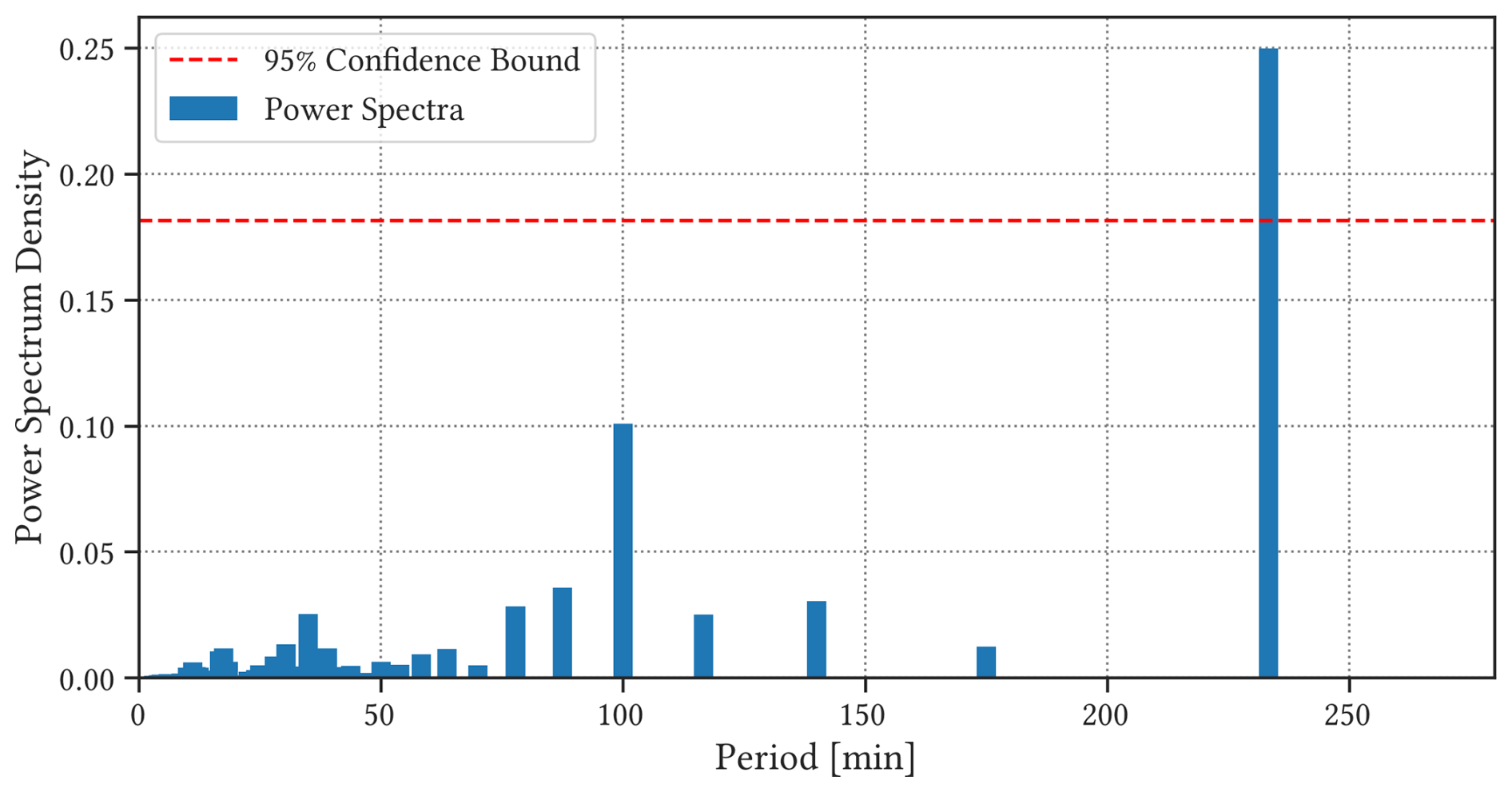
Figure 5The power spectral density (blue) and 95 % confidence interval for the time series b(t) based on the slope of the cloud size distribution C(a), obtained from Fourier spectral analysis.
Figure 5 shows the estimate of the power spectral density using the periodogram (blue) and the 95 % confidence interval (red) obtained from the noisy time series b(t), plotted as a function of period . The 95 % confidence interval defines the threshold that separates oscillatory signals from noise, against the null hypothesis that all signals in the periodogram are Gaussian noise, and is based on a chi-squared distribution χ2 with 2 degrees of freedom (Panofsky and Brier, 1958).
There are two prominent periods on the periodogram, one at T=100 min and the other at T=233 min, but only the latter signal is above the 95 % confidence interval. Both signals have periods longer than the 80 min period observed by Feingold et al. (2017), and no significant signals can be found at shorter periods. The signals are found in the low-frequency regime, and because of that, the frequency bin width is too large to pinpoint the exact period from the periodogram, especially for T=233 min. Each coefficient in the periodogram corresponds to period for . The longer the period, the coarser the resolution, which greatly reduces the effectiveness of the periodogram in isolating oscillatory components from the noisy time series. This period is also much longer than the expected oscillatory behaviour (Dagan et al., 2017; Yamaguchi et al., 2019), and it is possible that it is a harmonic of a fundamental frequency hidden by noise and non-stationarity.
We also tested other methods to estimate power spectral density, such as the circular autocorrelation function (ACF; Parzen, 1962b), but the (partial) autocorrelation function of the observed time series b(t) decreases slowly over time, and no significant lag can be found. The presence of noise and the non-stationary nature of the time series make it difficult to examine the behaviour of the time series.
2.5 Gaussian process regression
As shown in the previous section, traditional methods struggle to identify the underlying oscillatory behaviour in the observed time series. Internal fluctuations in the cloud field and the uncertainties from the numerical methods used in the estimation for the slope of the cloud size distribution can mask the underlying trend in the observation. To handle the uncertainty, we make use of the Gaussian process (GP) regression (Rasmussen and Williams, 2006). A Gaussian process is a set of random variables, any finite number of which have a joint Gaussian distribution. GP models can explicitly model and learn the noise level directly from the data by introducing an explicit noise term that we use to represent numerical uncertainties involved in sampling and constructing the time series b(t) of the cloud size distribution.
The time series can be considered a regression problem for a latent function f over observations y=y(x) made at points with noise ϵy, or
Assuming no prior knowledge about the noise ϵy, we formalize this uncertainty as an additive independent identically distributed Gaussian distribution with zero mean and a variance of (i.e. ). The subscript indicates that the uncertainty comes from the noisy observation y.
In this framework, the prior p(y|f) can be formalized as a (Gaussian) probability distribution, defined uniquely by its mean μ(x) and a covariance function k(xi,xj):
where K is an n×n matrix of covariances () of the joint distribution p(x) evaluated at two arbitrary points, which can then be used to define a Bayesian prior that reflects our belief about how the model should behave prior to observing any data points.
For a set of observation points , we can write the covariance matrix K(x,x) as
and because the noise is assumed to be independent, we can modify the covariance function to include the noise term. Because the additive, independent noise term only applies to the diagonal elements of the covariance matrix,
where σ2 is the variance of our (independent Gaussian) noise term.
To make predictions, we need to obtain the posterior distribution by conditioning the prior distribution using the observations. To this end, we set up a joint distribution between the observations made at training points y=f(x) and the function values at testing points as
which can be conditioned by the observations y to yield the posterior distribution, which is also Gaussian, as
This is fully specified by the respective mean and variance:
A crucial step in Gaussian process regression is determining the covariance K, also called the kernel, which embodies prior knowledge or our assumptions about the observed processes. A kernel function determines how an arbitrary pair of sample points x and x′ are related to each other. Essentially, it reflects our belief about how the probability distribution (the target function f(x) under the observed data, as seen in Eq. 8) behaves.
The most widely used covariance function is the square exponential (SE), defined as
where λ is typically defined as a length scale or a timescale for the time series data. The timescale λ is one of the hyper-parameters in our GP model that determines how smoothly the resulting process varies over time. The SE kernel is most widely used as it gives enough freedom to model a wide range of timescales, and it has an added benefit of being infinitely smooth, which is useful later.
For the purpose of this study, we also use a periodic kernel that assumes a sinusoidal process, which was originally defined by MacKay (1997) as
where λ is a timescale, and T is the period of oscillation.
The timescale λ and the period T are the hyper-parameters, which control the shape of the posterior distribution. These hyper-parameters are initially unknown, although the prior distribution can be specified based on domain knowledge, initial observations, or some prior assumptions about the data. In order to determine a better estimate of the hyper-parameters, we need to perform inference based on the marginal likelihood, which is defined as the integral of the likelihood and the prior, or
where the term marginal refers to the process of taking an integral over y, or marginalizing over the observations, in order to obtain p(y|x).
Note that under the Gaussian process model, both the prior and the likelihood must also be Gaussian (MacKay, 1997; Rasmussen and Williams, 2006). The integral above reduces to
which defines the marginal log likelihood (MLL). A more detailed derivation can be found in Chap. 2 of Rasmussen and Williams (2006). By maximizing the marginal log likelihood, we can find the hyper-parameters that maximize MLL, which can best explain the observed data.
Based on the time series of cloud size distribution in Fig. 4, we can assume that a simple periodic kernel is not enough to model the complexity of the observed time series. Therefore, we added an SE kernel to the periodic kernel to model numerical instability and uncertainty (MacKay, 1997; Rasmussen and Williams, 2006), which we can use to customize our GP model to better reflect the underlying assumptions about the observed dataset. In this case,
where the SE kernel has been added to account for the non-stationarity. With no prior assumptions about the underlying dynamics, we also tested different combinations of , such as adding two periodic kernels together in order to model two oscillations at different timescales (Dagan et al., 2018), but using a single periodic kernel for periodicity detection has been proven to be sufficient in our case.
The GP model uses a gradient descent algorithm to find the hyper-parameters that optimize the (log) marginal likelihood. However, there is no guarantee that it will reach the point that maximizes the marginal likelihood, which will define the best set of hyper-parameters. It is possible that even with multiple experiments, the GP model might be fitted to local maxima, as the gradient descent cannot evaluate the full posterior distribution (see Sect. 2.7 for more information). Fortunately, at least for the timescale in the periodic kernel kper, we can define a reasonable range of values that can represent the oscillation in the cloud size distribution. To demonstrate that the 95 min period is not a local minimum, we repeatedly trained our GP model with different initial periods, ranging from 5 to 150 min at 5 min intervals, and all of these tested periods converged to the 95 min period after training. We also tested periods longer than 150 min, but the resulting posterior distribution ignores most of the variability in the time series with T>150 min. In most cases, the initial period only affected the number of steps that needed to be taken for the gradient descent algorithm to reach the 95 min period; the farther the initial period was from 95 min, the longer it took for the algorithm to optimize the periodic kernel.
Therefore, we chose an initial period of 90 min, which corresponds to the previously observed period of oscillation (Dagan et al., 2018). We set a lower bound of 15 min to timescale λ to avoid overfitting and to ensure that most of the variability in the observed time series can be explained by the periodic kernel kper. If the timescale λ is allowed to be small, the GP regression model will simply fit the observed data as close as possible regardless of the periodicity.
The GP models are implemented in GPytorch (Gardner et al., 2018), and the hyper-parameters are trained using the Adam optimizer (Kingma and Ba, 2014). The resulting GP posterior distribution with the kernel can be seen in Fig. 7. The initial application of the GP model serves two purposes. First, by assuming a smooth variation in the slope b, we relegate the uncertainty involved in calculating the slope b from the cloud size distribution C(a) to the noise term. Second, as we assume no prior knowledge about the periodic evolution of b, the hyper-parameters can be used as a preliminary estimate for the following procedure, which is described in the next section.
2.6 Periodicity detection
The smoothly modelled distribution from the mean GP posterior distribution b(t) in Fig. 6 corresponds well to the observed time series, showing the oscillatory behaviour within the noisy observation with a period T=95 min. In this particular case, the initial regression attempt yields a good estimate of the hyper-parameters for the observed time series. However, in situations where a general, long-term trend breaks the quasi-stability assumption, additional steps should be taken in order to better isolate the oscillatory behaviour of the cloud field, which still remains noisy and non-stationary.
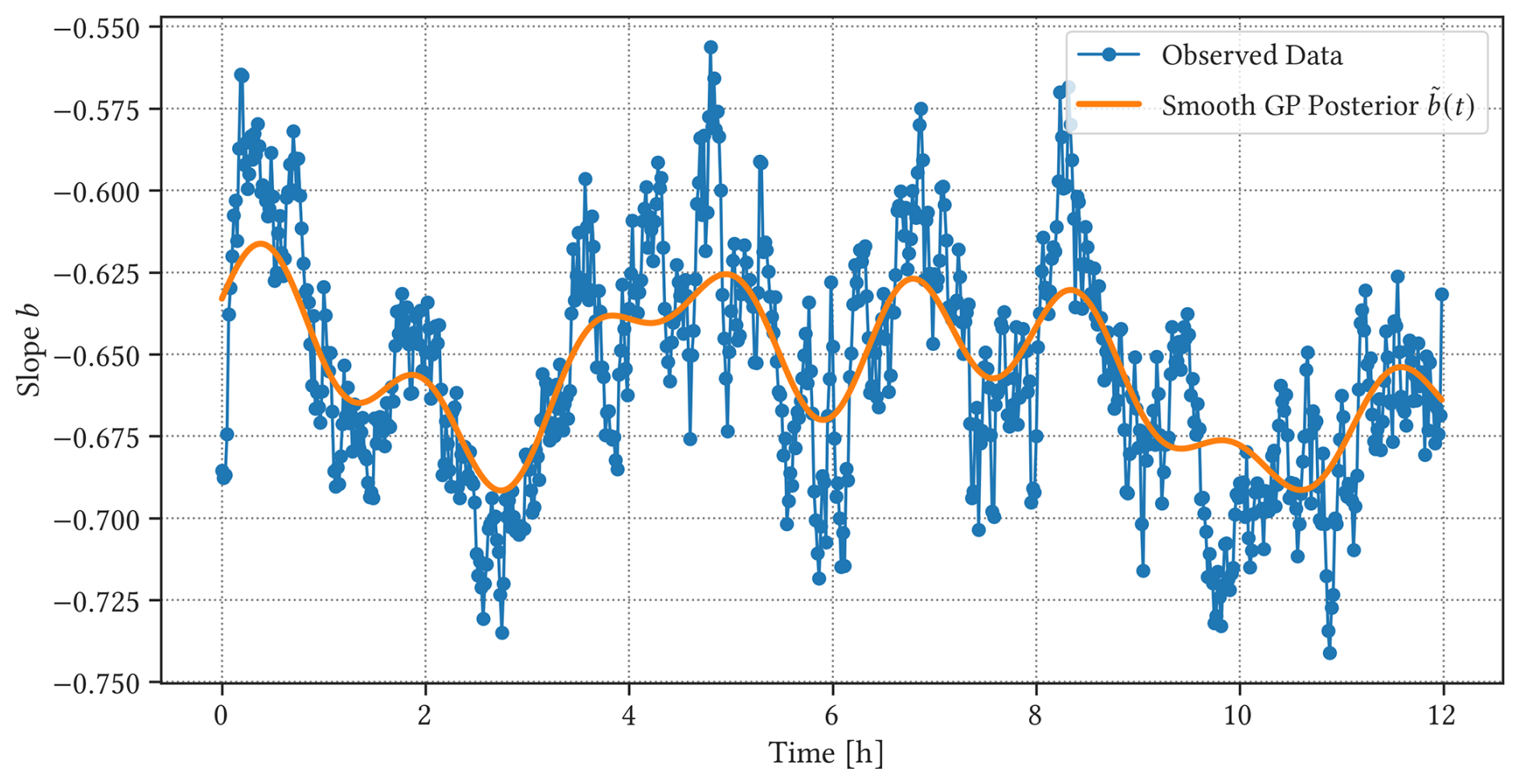
Figure 6Mean posterior of the trained GP model (orange line) compared to the observed slope b of the cloud size distribution C(a) (blue line) for the first 9 h of simulation used for training.
The standard practice to account for non-stationarity is to take the derivative of the time series . If the oscillation is dominated by a single frequency, the frequency should also characterize the derivative of the oscillation. Given this, we build a GP regression model to estimate the period of the oscillation in , which can be seen in Fig. 7.
We found that taking the derivative of b(t) also successfully normalizes the observed time series, which is useful for statistical analysis. Applying the ADF test (Dickey and Fuller, 1979; Hamilton, 1994) to also confirms that the resulting time series is now stationary. As shown in Fig. 7, the values of vary with zero mean, with no obvious trend over time. There are small variations in the amplitude, but we can now drop the SE kernel to account for the variability in the y axis and only use the periodic kernel (i.e. ) to estimate the periodicity T. This reduction in the number of hyper-parameters is also necessary to perform Bayesian inference, which is described in more detail in Sect. 2.7.
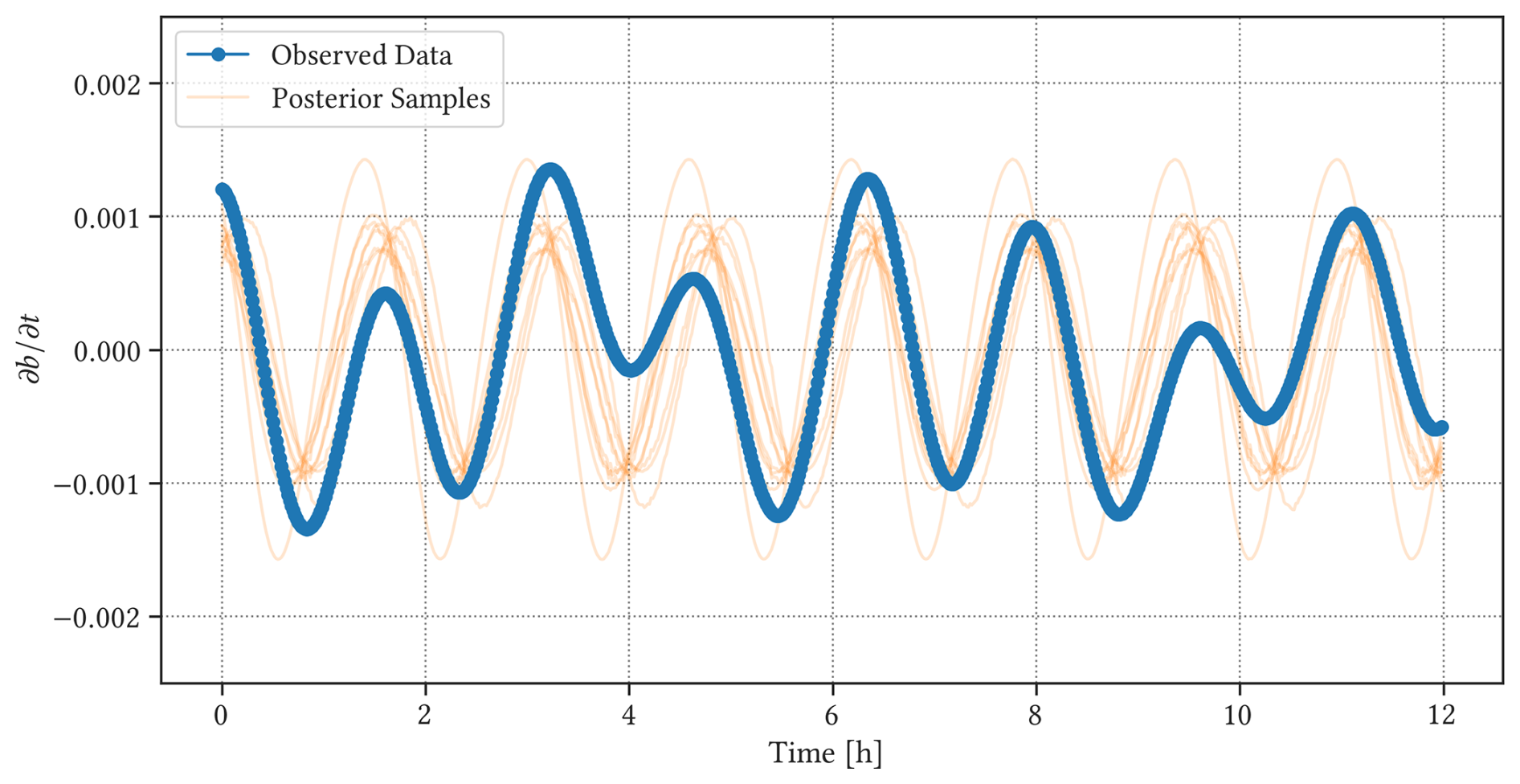
Figure 7Samples from the posterior distribution of the trained GP model (orange line) compared to the observed time series of (blue line) for the first 9 h of simulation used for training.
Figure 7 shows the target observation and randomly drawn samples from the posterior distribution. These samples are drawn from the posterior distribution and represent possible realizations of our GP model trained by the observations. The variability in the periodicity seems to be small relative to the uncertainties in the observed time series.
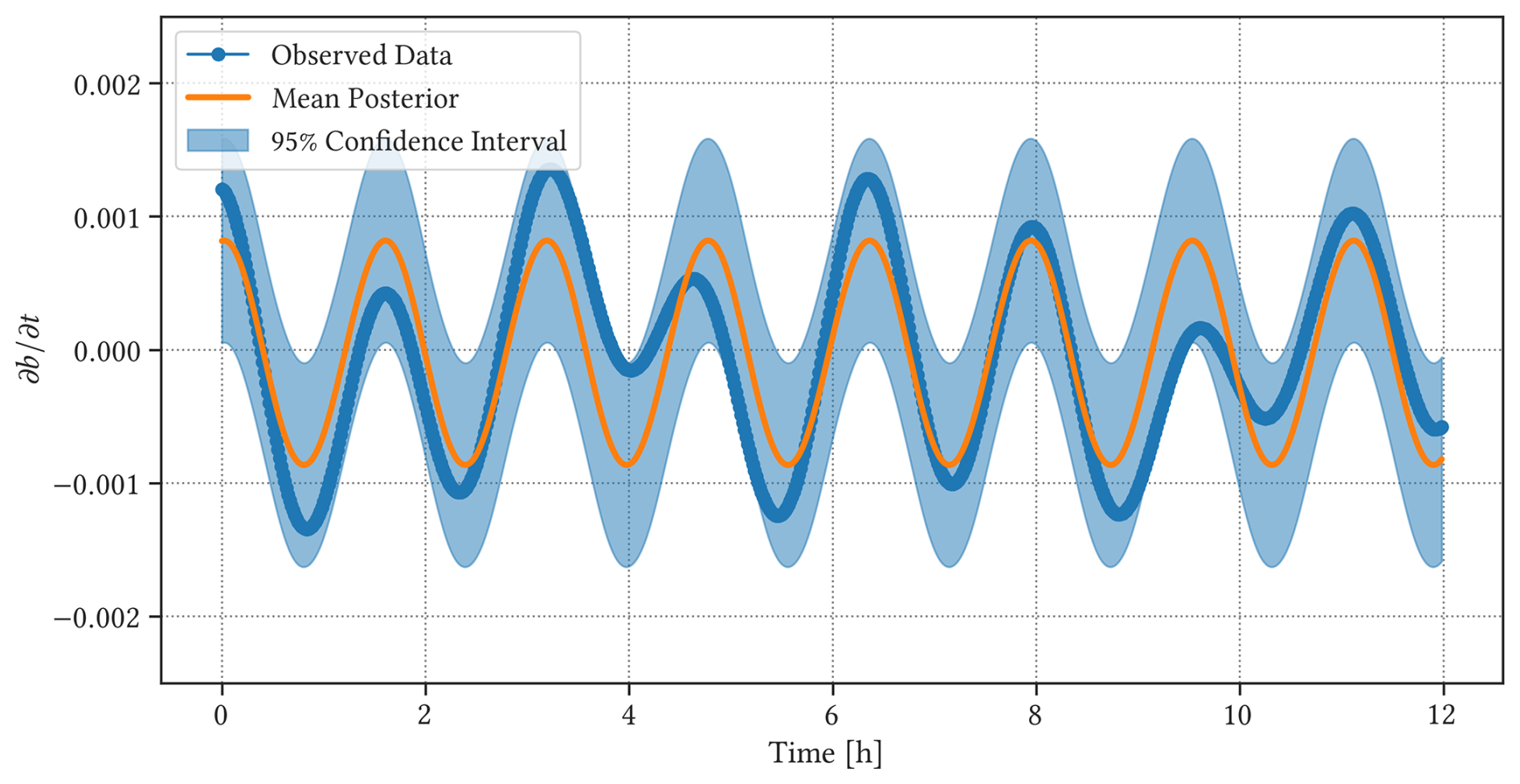
Figure 8Mean posterior distribution of the periodic GP model (orange line) compared to the derivative of time series used as the observation (blue line). Shaded regions show the (pointwise) 95 % confidence interval.
The results of applying the periodic GP model can be seen in Fig. 8, showing the mean posterior distribution for our Gaussian process based on a periodic kernel kper with noise. Most of the variability comes from deviations in , and the use of a simple periodic kernel is sufficient to isolate the underlying oscillatory behaviour from the observation. The mean posterior distribution in Fig. 8 based on the GP model again yields a period of T≈95 min, which is close to the 90 min period observed by Dagan et al. (2018) in tropical marine shallow cumulus clouds under precipitating conditions.
Next, we compare the mean posterior distribution from the GP derivative model to b(t). We integrate the mean posterior distribution in Fig. 8 to obtain an estimate for b(t) within a constant. For a direct comparison with b(t), we applied the min–max normalization algorithm:
where is the normalized time series, and y is the original observation. This can be used to perform a quick comparison between the integral of the mean posterior distribution and the observed time series b(t), which is shown in Fig. 9. The normalization, however, makes it more difficult to see that the time series of the slope b(t) of the cloud size distribution has a negative sign (see Fig. 6). A small value in the normalized slope indicates a more negative slope or a steeper slope where there is a relative abundance of smaller clouds. On the other hand, a large value in represents a less negative slope where there is a relative abundance of larger clouds.
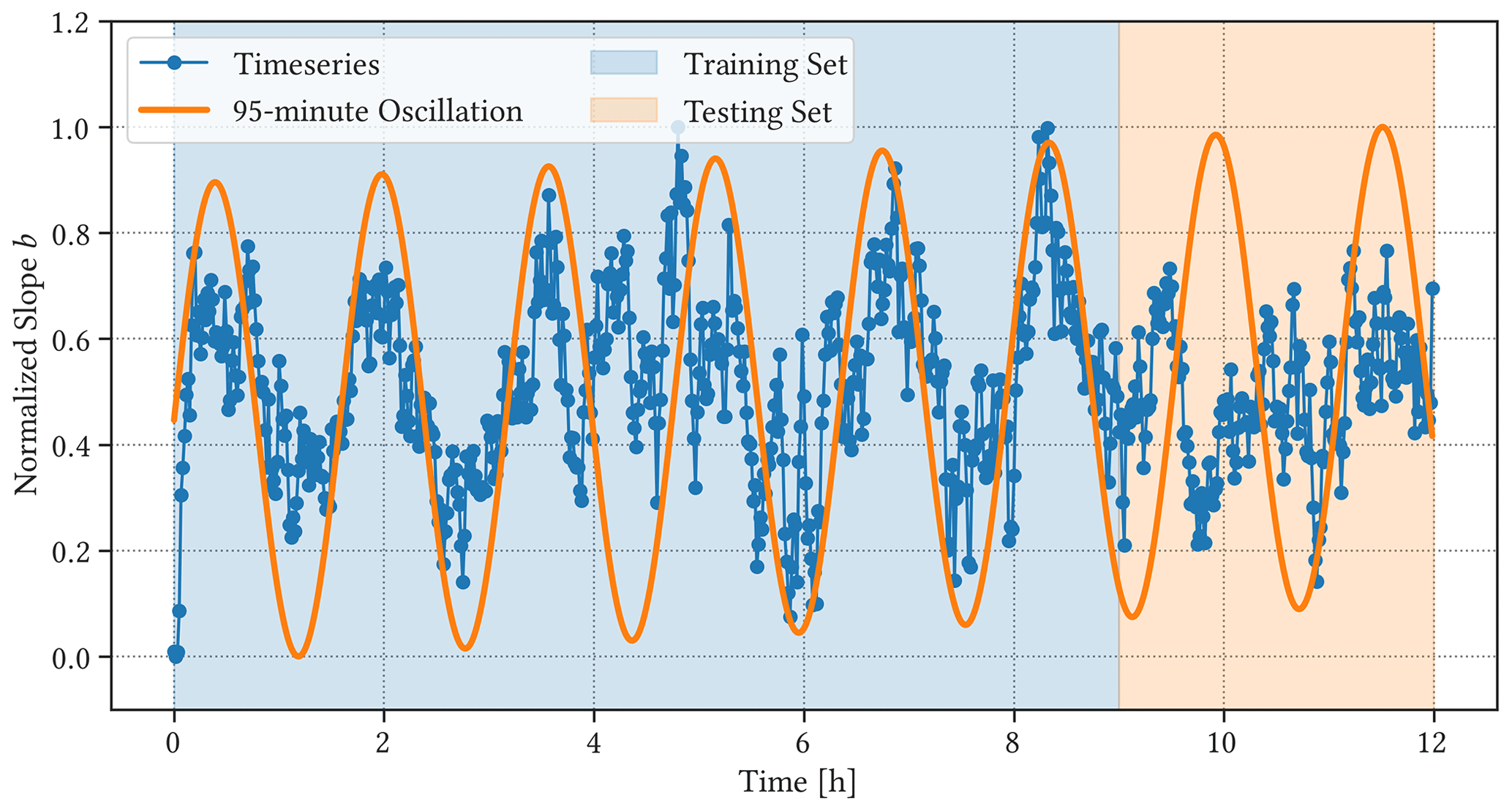
Figure 9Normalized time series of slope b of the cloud size distribution C(a) (blue line; same as Fig. 4) compared to the mean posterior from the periodic GP model (orange line), representing the 95 min oscillation. The full time series includes the 9 h training set used for the GP model fit (blue region) and the 3 h testing set used for the GP model evaluation (orange region).
2.7 Fully Bayesian Gaussian process
While the GP regression model yields posterior distributions with confidence bounds, as shown in Fig. 9, we cannot obtain a measure of uncertainty for the hyper-parameters because the gradient descent algorithm cannot evaluate the entire hyper-parameter space. We can instead use a fully Bayesian GP model to estimate the uncertainties in the hyper-parameters of the GP model by stochastically modelling the full posterior distribution. This is done by assuming a prior over model hyper-parameters θ∼p(θ), also called the hyper-prior, that is, the prior over the hyper-parameters. We can then define the joint posterior with the hyper-prior p(θ) as
where we have omitted input data x and x* for the sake of simplicity. For a full, illustrative description of the Bayesian model selection, refer to Chap. 5.2 in Rasmussen and Williams (2006).
Given the test input data x*, we retrieve the predictive posterior by integrating the joint posterior
whose inner integral reduces to the standard GP posterior, which has the same structure as Eq. (14). Using the same formalization in Sect. 2.5, the outer integral can be estimated as
where . The integral remains intractable. In order to estimate this integral and obtain the predictive posterior as described in Eq. (25), we use a modern variant of the Hamiltonian Monte Carlo (HMC) algorithm called the No-U-Turn-Sampler (NUTS; Hoffman and Gelman, 2014) in Pyro (Bingham et al., 2019).
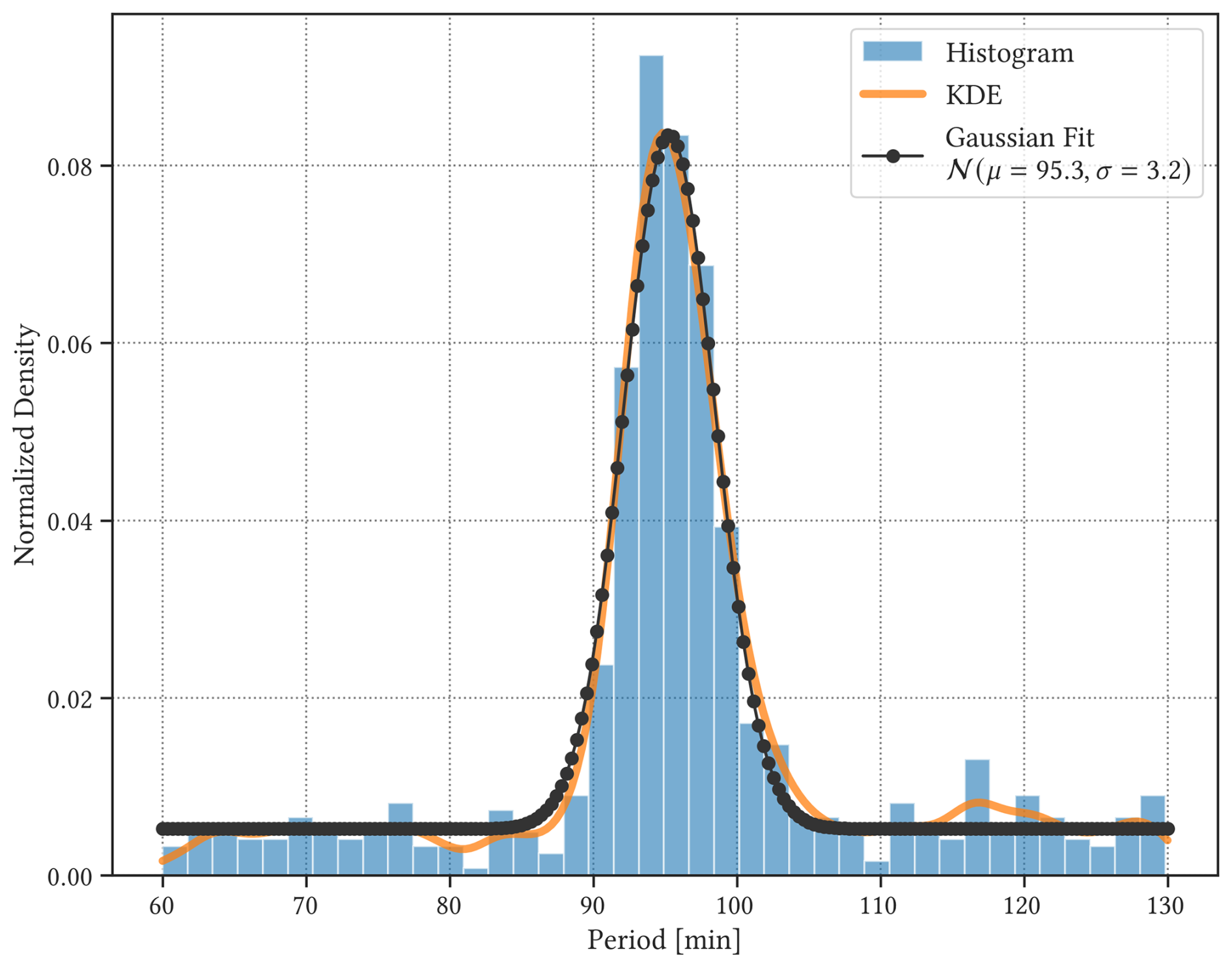
Figure 10A histogram (blue) and the corresponding kernel density estimate (orange) of periods retrieved from Markov chain Monte Carlo (MCMC) experiments. Fitting the Gaussian distribution to KDE (black dots) infers 95±3.2 min for the observed periodicity in the time series.
The fully Bayesian GP model was applied to the time series of . We initially employed normal priors for the characteristic timescale λ and periodicity T for the periodic kernel, but the GP model quickly converged to the previously observed 95 min period. To avoid over-fitting, we initialized the Bayesian GP model with an uninformative, uniform prior that allows any quasi-realistic values for the period of oscillation. Unfortunately, the characteristic timescale λ fails to converge with the uniform prior in the presence of periodicity, which confirms that the Bayesian GP model can explain the observed time series solely with a periodic kernel kper and that the post-processing steps taken in Sect. 2.6 are useful for the Bayesian inference. The characteristic periodicity T was given a uniform prior 𝒰(30,130), and Bayesian inference via MCMC was performed, with four chains generating 700 samples, including 300 warm-up samples.
The resulting histogram of the characteristic periods taken from 700 samples can be seen in Fig. 10, which shows that the most probable period that can be inferred from the time series is 95±3.2 min. It is not surprising that the fully Bayesian GP model converged to the same period from the previous section, and it confirms that the non-Bayesian GP model is a reliable framework that can identify oscillatory motions in noisy time series observations of moist convection.
3.1 Cloud size distribution
We estimated the periodicity in the evolution of the slope of the cloud size distribution; the estimated periodicity in is min, which corresponds well to previous studies involving marine shallow cumulus clouds (Dagan et al., 2018). This periodicity is slightly longer than 80 min estimated by a Fourier spectral analysis of an LES cloud field (Feingold et al., 2017). This could be due to the differences in precipitation strength, aerosol concentration, or domain size. In the bowling-alley domain, clouds are allowed to develop along the direction of the mean wind, which corresponds to the elongated axis of 42 km. Therefore, we expect the development of the cloud field to resemble the larger model run by Dagan et al. (2018). Moreover, the lower-frequency mode of oscillation found in these studies makes it difficult to accurately determine the periodicity, as described in Sect. 2.4.
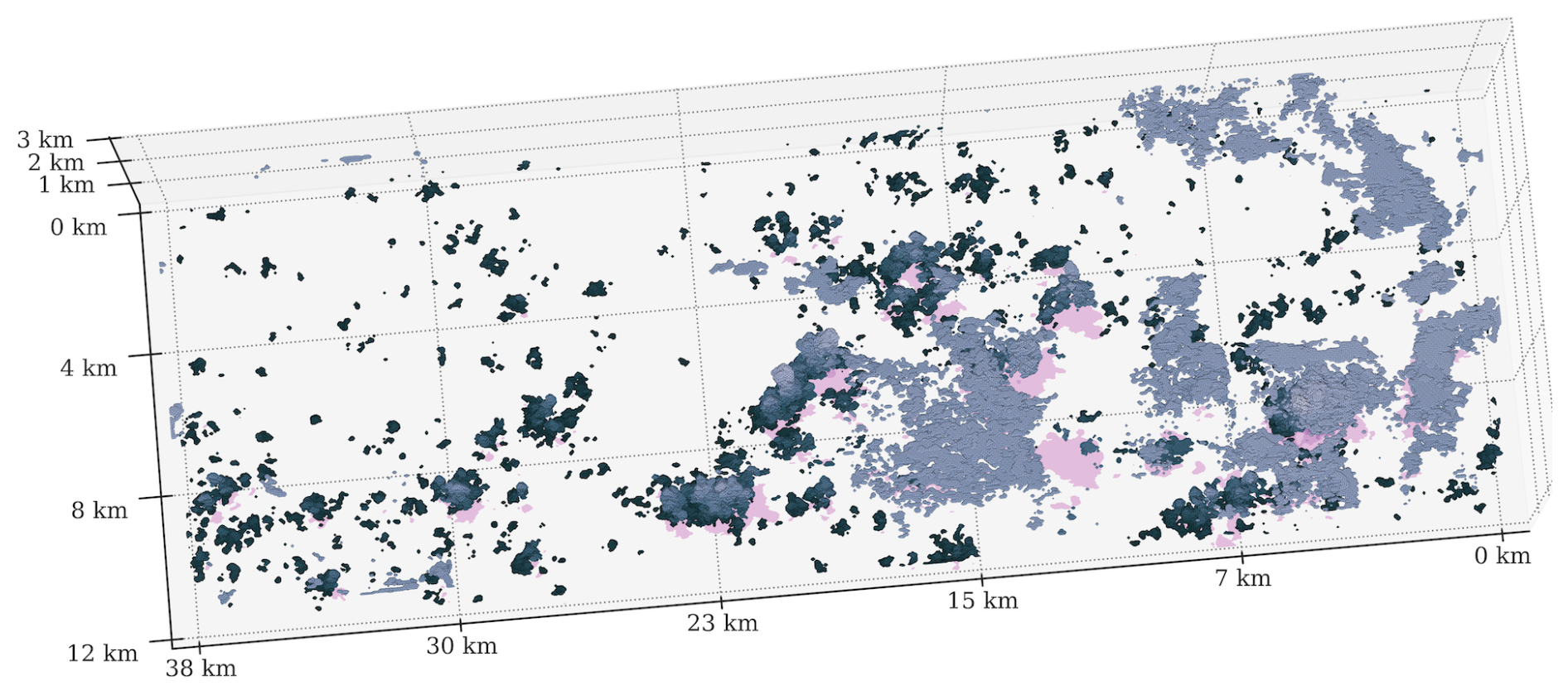
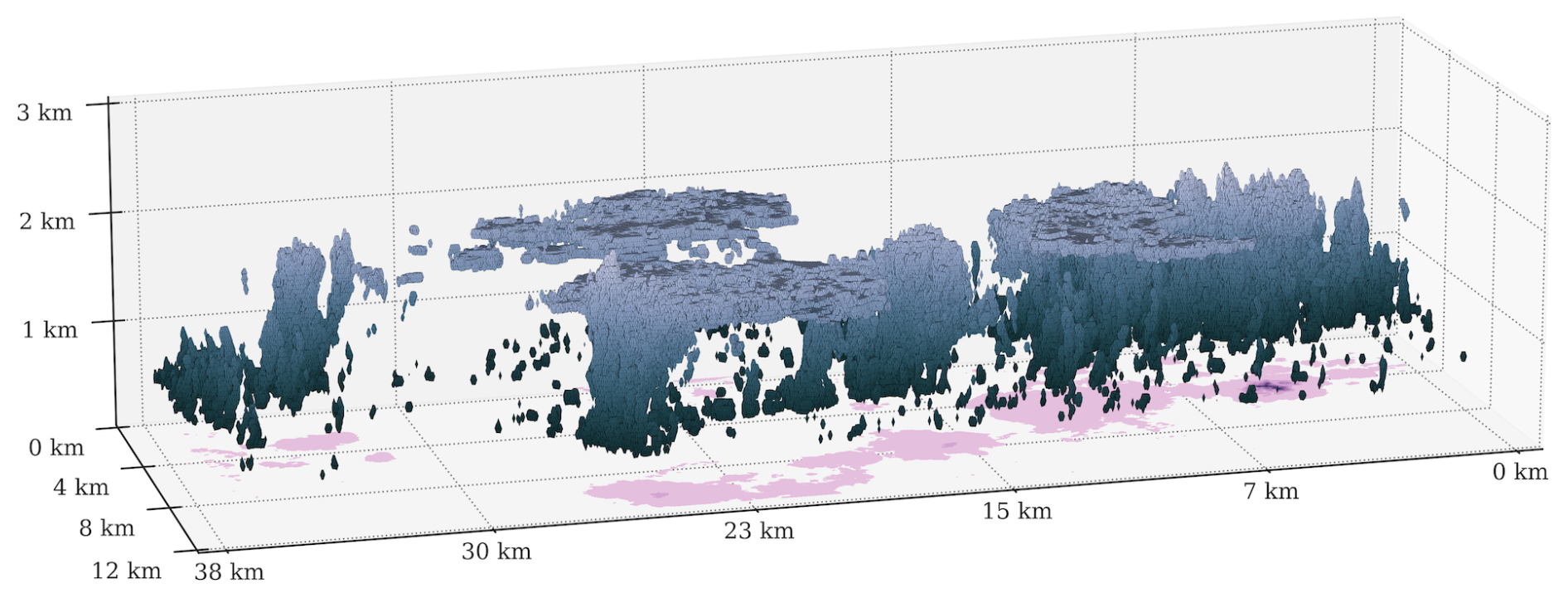
Figure 11Same as Fig. 1 but seen from the top of the atmosphere 250 min into the simulation.
The simulated time series of the mean posterior distribution for generally corresponds well to the observed changes in b(t), except 4 and 10 h from the beginning of the time series. Small-scale fluctuations within the cloud domain could disrupt large-scale convective and precipitative patterns, even with a large model domain. To gain more insight into the internal variations within the cloud field, we visualized the three-dimensional cloud field for the duration of the simulation. Figure 11 shows a snapshot of the modelled cloud field taken 250 min into the simulation.
Based on Fig. 9 at around t=4 h, the cloud field is expected to go towards a phase of relatively weak convection where there is a relative abundance of smaller clouds. Small normalized values correspond to more negative slopes of the cloud size distribution. However, upon inspecting the evolution of the cloud field during this time, large structures form at the top of the cloud layer (light grey regions in Fig. 11) as a result of strong convective activity, which persist until t=5 h into the simulation. Once the large, thin layer of clouds at the top dissipates, the deviation in the observed time series of b becomes much smaller. During this time, as shown in Fig. 11, the cloud field is dominated by the growth of small clouds. However, a thin layer of clouds persists and skews the slope b of the cloud size distribution.
On the other hand, around 9 h into the simulation, the cloud field is expected to go towards a phase of relatively strong convection where there is a relative abundance of larger clouds. Visually inspecting the development of the cloud field (Fig. 12) suggests that strong convective activities occur in groups, and clouds tend to merge and become much larger, which reduces the relative number of large clouds compared to small ones that are less likely to merge with other clouds or reach the cloud top layer. Because of this, the normalized value of b of the cloud size distribution becomes smaller, indicating a much steeper slope despite the strong convective activity.
As shown in Fig. 12, clouds form in groups and merge into large convective columns. The successive formation of clouds can also be seen, where clouds appear in a line following the advection of the large clouds (Moser and Lasher-Trapp, 2017). This can also be attributed to the effect of spatial organization, where the cloud field in Fig. 12 can be divided into regions of strong convection, followed by regions devoid of clouds. The development of large clouds can be seen, as expected by our GP model, but these clouds could have been merged into small regions due to the spatial organization of the cloud field. Features of organized shallow convection have been observed in large-eddy simulations with small to moderate domain sizes (Seifert and Heus, 2013; Xue et al., 2008). However, such features are sporadic, and the clouds become scattered again at t=11 h into the simulation.
We were not able to reliably isolate a high-frequency oscillation reported in previous studies, both for T≈10 min (Dagan et al., 2018) and for T≈15 min (Feingold et al., 2017), with a modified prior distribution. This is likely due to the large noise in the time series b(t) (cf. Fig. 4), as well as small variations in the amplitude of the oscillation. Over-fitting of noisy time series becomes an issue in such cases as the GP model quickly adheres to random noise, or observational uncertainties, but not necessarily to high-frequency oscillation.
Given that the primary mode of oscillation found in this study has a period of 95 min, we suspect that the size of the domain used for the LES run (43.2 km × 12.8 km) might have made it more difficult to isolate the evolution of individual clouds (Dagan et al., 2018), as we expect the 15 min period to be correlated to the convective timescale for individual clouds rather than changes in the mean cloud field (Feingold et al., 2017; Heus et al., 2009). It is also possible that such convective oscillation exists, but due to the nature of non-linear oscillation at small scales, our attempt to resolve the time series with a periodic kernel did not adequately capture the complex dynamics of non-linear oscillators (Koren and Feingold, 2011; Koren et al., 2017; Seifert and Heus, 2013) at the scale of individual clouds.
Lastly, using a fully Bayesian GP model to estimate the uncertainty in the characteristic periodicity T (Fig. 10) confirms that without any prior knowledge, except with an assumption that a reasonable period value would lie somewhere between 30 and 130 min, we could reliably retrieve a time series oscillation that is statistically significant, with a period of min.
3.2 Cloud fraction
As the oscillation is assumed to be driven mainly by the spatial and temporal organization of precipitating clouds, we make an assumption that the same periodic evolution in the dynamic and thermodynamic properties of the mean cloud field, such as cloud cover fc (Feingold et al., 2017) and vertical mass flux M, can also be observed. Therefore, we applied the GP regression method for the cloud fraction over the model domain fc, which is simply the fraction of the domain that is covered by clouds. Cloud fraction is calculated by projecting the three-dimensional clouds onto the ground and calculating the fraction of the two-dimensional grid cells that are covered by a cloudy region (with condensed liquid water, or ql>0). We repeat the calculation every minute to construct the cloud fraction time series fc(t).
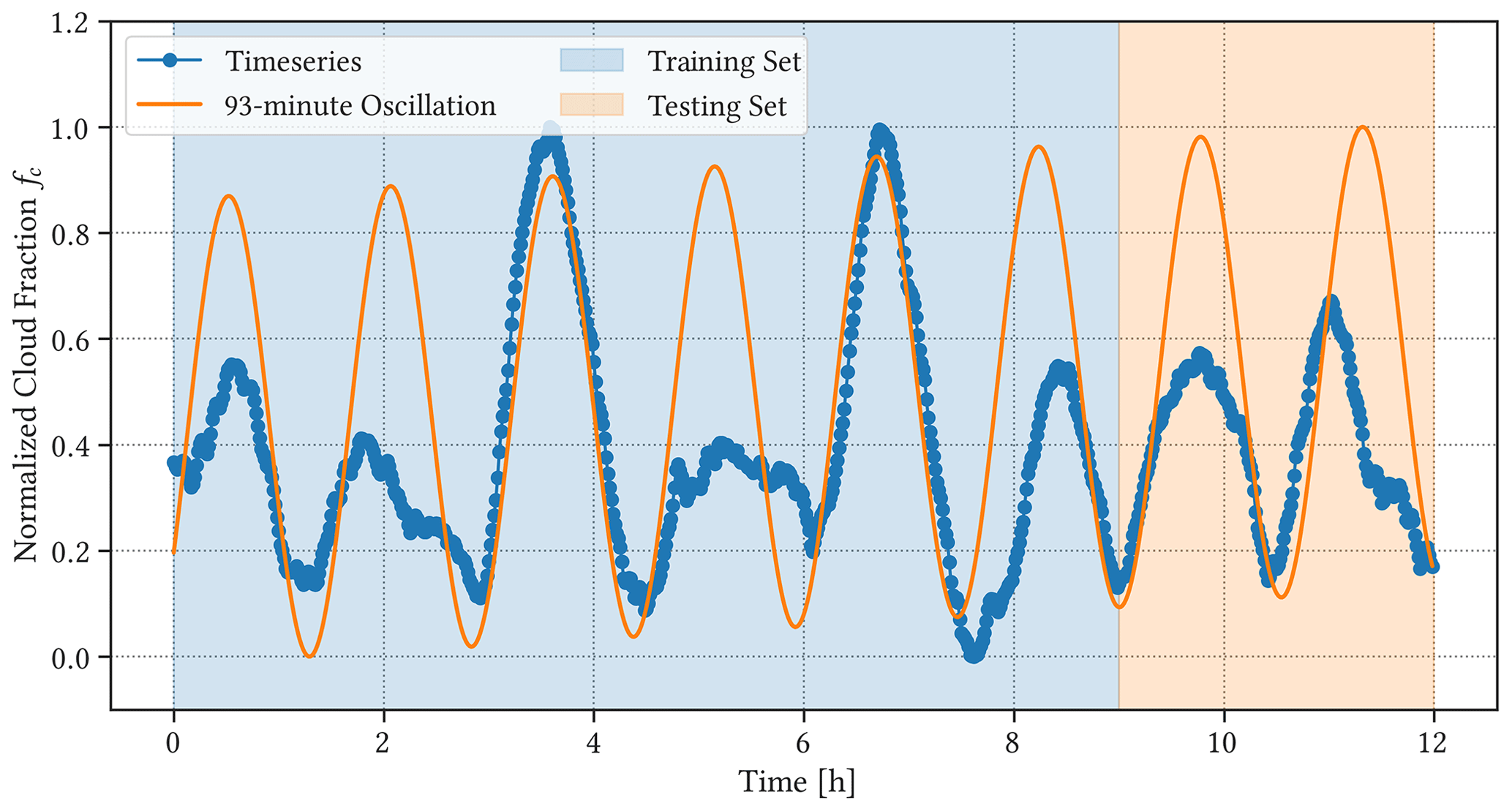
We applied the same numerical techniques presented in Sect. 2, including the uncertainty estimate for the hyper-parameters using the fully Bayesian GP model (Sect. 2.7). The results of applying the GP regression method can be seen in Fig. 13, where the period of oscillation estimated by the fully Bayesian GP model is shown to be min.
The period lies well within the range of estimated periods for , even when the modelled oscillatory evolution deviates from the observed values of b(t). This is because merging and splitting of clouds do not significantly change the area that is covered by those clouds. Likewise, persistent clouds forming at the top of the cloud layer tend to form over shallower clouds near the bottom of the cloud layer, and they do not seem to affect the oscillatory evolution in fc.
The proposed GP regression model can accurately estimate the periodic evolution of cloud fraction, but cloud fraction fc cannot account for internal variations in the cloud size distribution. The estimated mean posterior distributions of b and fc are well correlated, but the deviations noted in Sect. 3.1 are hidden in the time series of fc. Large values of fc are normally associated with a relative abundance of large clouds, but the actual state of the cloud size distribution could differ; for example, the cloud field can be dominated by small clouds near the cloud base but covered by a thin layer of clouds at the top (Fig. 11), in which case the radiative properties of the cloud field will be different from those of a cloud field that is dominated by large clouds, despite both having a large cloud fraction.
3.3 Average cloud vertical mass flux
We also applied the GP regression method to vertical mass flux M, which is defined at each grid cell as
where ρ is the air density [kg m3], w is the vertical velocity of the air [m s−1], and 𝒜 is the activity field that is 1 for the cloudy cell (containing condensed liquid water, or ql>0) and 0 otherwise.
The average mass flux can then be obtained by calculating the average mass flux across the cloud field and taking the average value over the vertical column as the vertical distribution of mass flux remains relatively consistent within the cloud layer. We use this value as a proxy for convective vigour in the modelled cloud field. We calculate at each time step to construct the time series of average mass flux for the simulated 12 h period (Fig. 14).
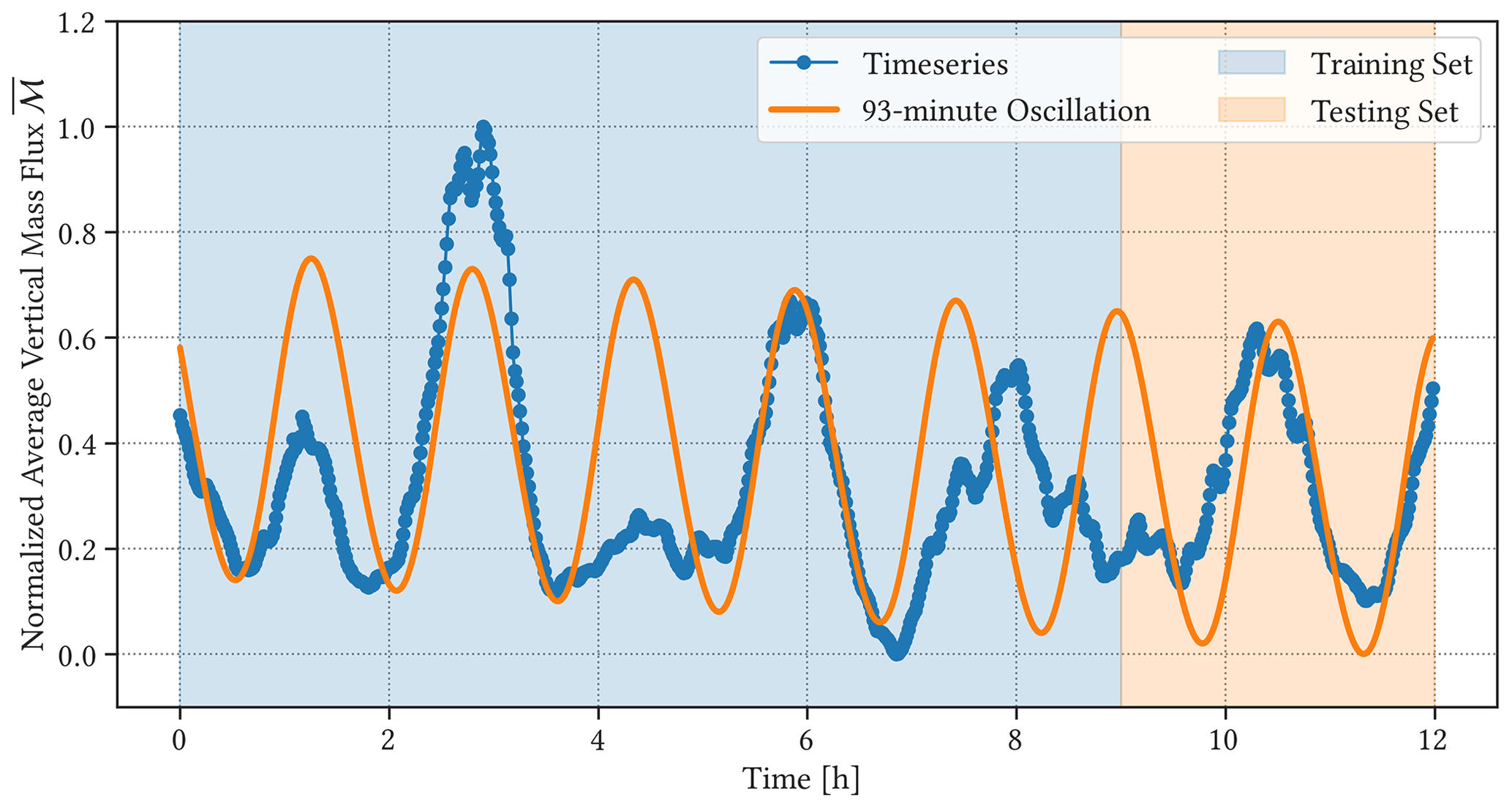
For vertical mass flux over the mean cloud field, the period is estimated to be min, which agrees well with the estimated ranges for both and fc. Figure 14 shows both the normalized mass flux time series and the integrated mean posterior of the periodic GP model. The time series of tends to be much smoother than that of the cloud size distribution because the fluxes have been averaged over the model domain.
The mean posterior distribution shown in Fig. 14 follows the observed time series quite closely for the training set, except around t=4 h and t=9 h into the simulation. The suppression of vertical mass flux around t=4 h is connected to the deviation in (Fig. 9). Small clouds form across the model domain during this period, which corresponds to large values of average vertical mass flux , but a thin layer of clouds persists near the top and reduces overall values of . On the other hand, the oscillatory behaviour in is disrupted between t=7 and t=10 h of simulation. As noted in Sect. 3.1, spatial organization of clouds could influence the deviation; during this time, clouds tend to form close to existing convective columns, which can be seen as regions of strong convective activities followed by regions devoid of clouds (cf. Fig. 12). The formation of cold pools from convective precipitation will result in a convergence of descending moist air, which can disrupt the oscillatory evolution of the cloud field and force the formation of large, organized groups of clouds.
In both cases, it would be useful to diagnose the changes in the vertical distribution of mass flux M to examine the factors contributing to internal fluctuations and gain more insight into how vertical distributions of moisture and momentum periodically re-arrange over time. This also allows us to examine how the clouds mix in terms of the entrainment and detrainment rates, where
for rates of entrainment e and detrainment d [], but a preliminary examination of domain-average vertical mass flux profiles reveals that the variability within the cloud field is too large, and more work needs to be done, which is outside the scope of this study.
3.4 Precipitation flux
As shown in Figs. 13 and 14, oscillations in and fc are well correlated, while the oscillation in seems to be lagging. That is, the peaks in correspond roughly to the troughs in both and fc. To visualize the relationship, we plotted normalized mean posterior distributions from our GP model for the three variables in Fig. 15.
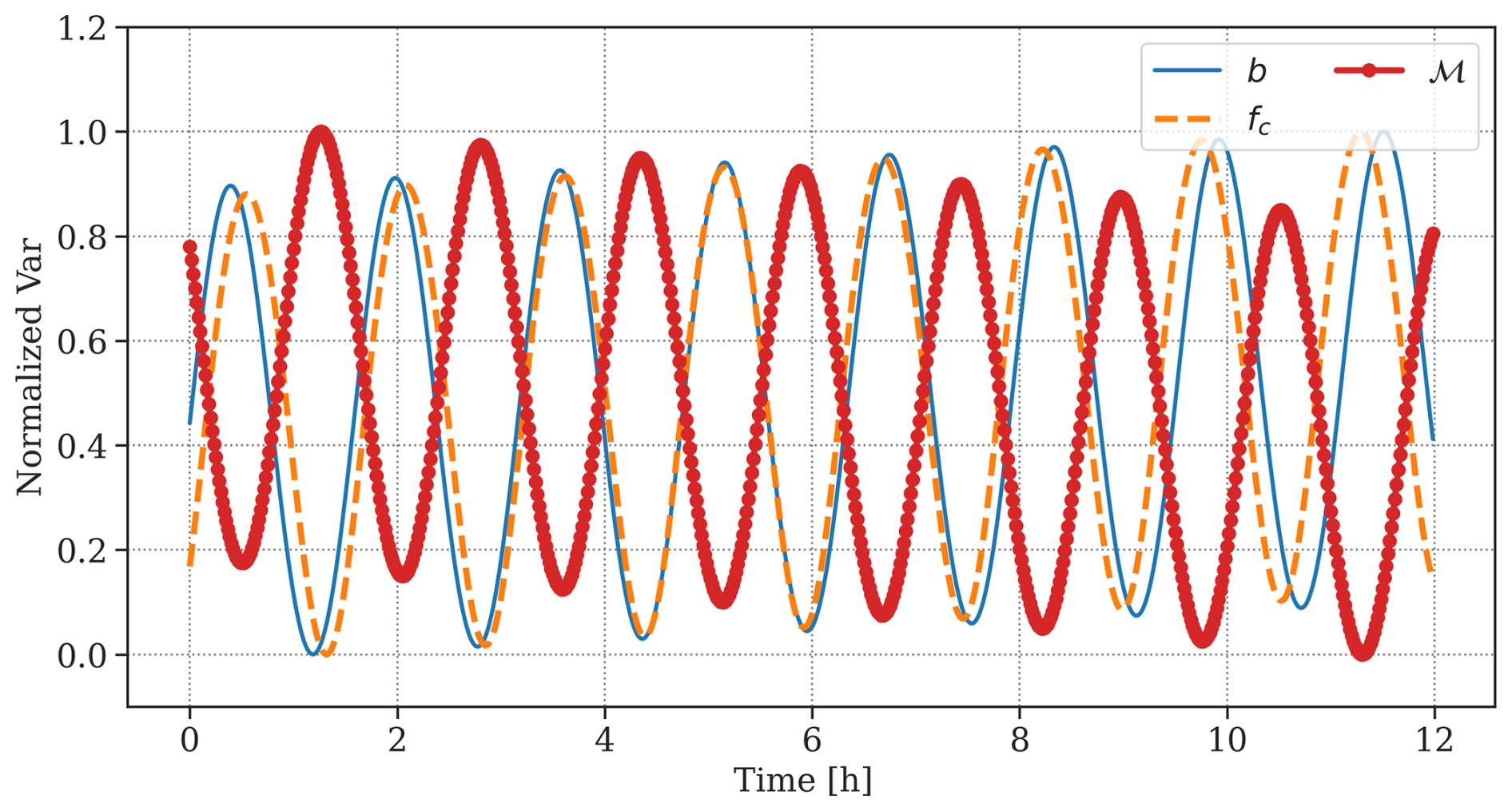
Figure 15Normalized time series of slope of the cloud size distribution C(a) (blue), average vertical mass flux (red), and cloud fraction fc (orange), based on the periodic GP model.
Figure 15 shows the oscillatory evolutions of the mean posterior distributions for , fc, and , which gives more insight into how the marine boundary-layer cumulus clouds evolve over time in a high-resolution model. When there is a relative abundance of larger clouds, the normalized slope of the cloud size distribution and cloud fraction fc becomes larger, which corresponds to a less negative (less steep) slope b of the cloud size distribution. Hence, the changes in cloud fraction fc are correlated to the number of large clouds; that is, the number of large clouds (mostly observed as anvil-like structures near the cloud layer top) determines how much of the model domain is covered by clouds.
On the other hand, peaks in mass flux , averaged across the model domain, are associated with smaller values of . This corresponds to a more negative (steeper) slope b of the cloud size distribution, which suggests a relative abundance of smaller clouds, associated with smaller values of cloud fraction fc. The formation of smaller clouds is connected to an average increase in vertical mass flux across the domain, while the formation of larger clouds is associated with weak overall mass flux. This is indicative of the recharge–discharge mechanism, where strong convective activities are associated with precipitation and the formation of cold pools, which in turn suppress cloud formation. As the larger clouds dissipate and surface fluxes introduce atmospheric instability, average vertical mass flux across the model domain increases and small clouds develop, which then promote the formation of larger clouds (Dagan et al., 2018). The increase in average vertical mass flux can also be attributed to the dynamic lifting at the boundaries of cold pools, where descending moist air from cold pools merges to promote the growth of large clouds.
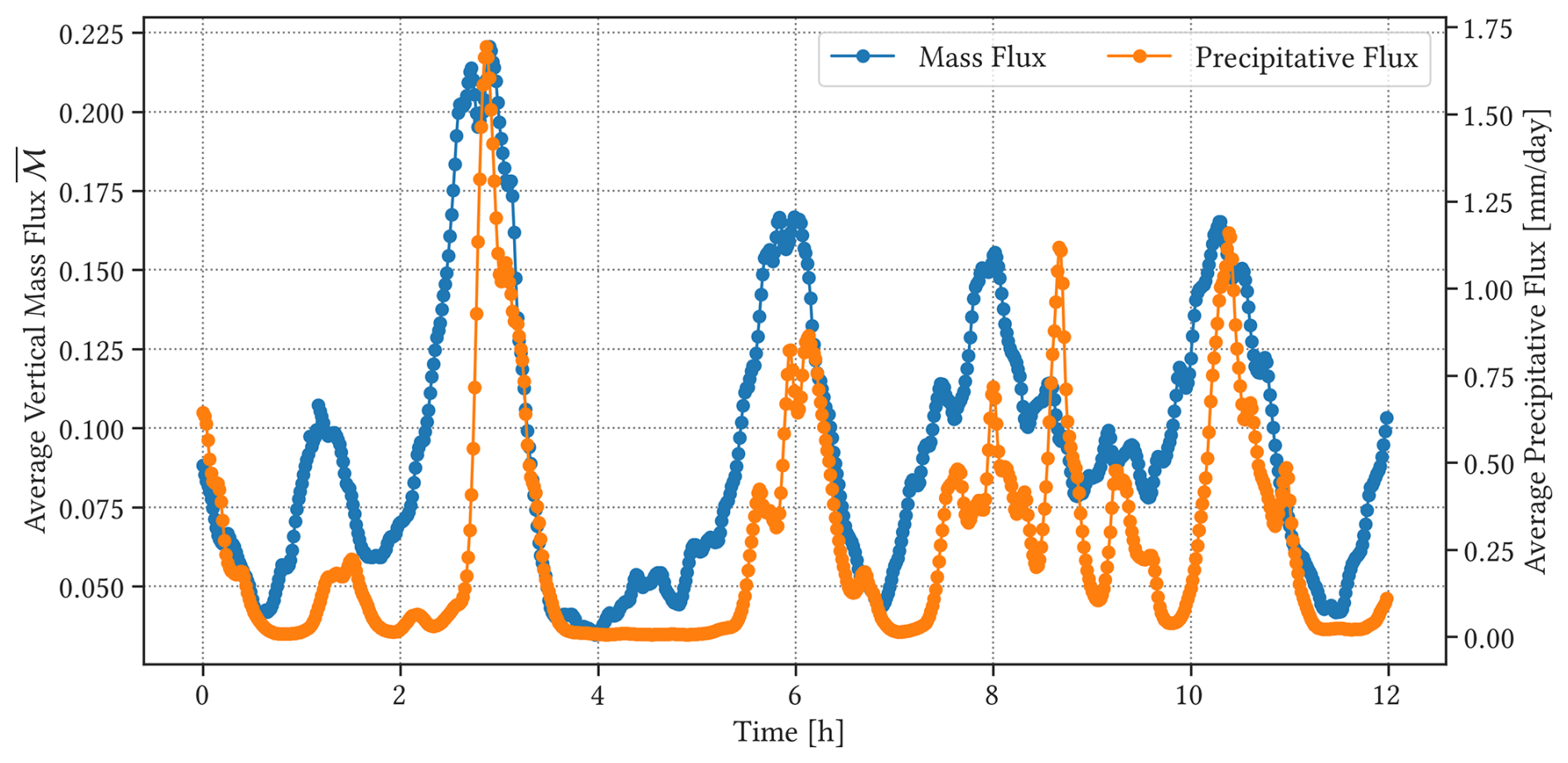
Figure 16Normalized time series of average vertical mass flux [] and precipitation flux [mm d−1].
To further examine the relationship between the strength of convection, inferred from average mass flux , and precipitation, we plot the time series of the average vertical mass flux compared to the precipitation flux, averaged over the cloud layer, in Fig. 16. It is clear that periods of strong vertical mass flux are followed by vigorous precipitation, where latent heat gets released, warms the cloud layer, and promotes the formation of large clouds. As large clouds form and begin to precipitate, the sub-cloud layer cools due to evaporation, and warming of the cloud layer and cooling of the sub-cloud layer reduce (discharge) atmospheric instability within the boundary layer, rapidly weakening convection and precipitation until surface fluxes re-introduce atmospheric instability.
Hence, the time series of mass flux and precipitation in Fig. 16 are consistent with the proposed recharge–discharge cycle (Dagan et al., 2018), which is primarily driven by precipitation and latent heat release due to convection. That is, each recharge–discharge cycle consists of a 95 min oscillation where atmospheric instability is charged by surface fluxes and discharged by convection and precipitation over the 95 min period. This period, however, can be disrupted by internal fluctuations and spatial organization of the cloud field (cf. Sect. 3.1). Furthermore, changes in aerosol concentrations will affect precipitation efficiency, where rain formation in polluted environments tends to be less efficient and therefore slower (Seigel, 2014b; Yamaguchi et al., 2019).
To isolate the role of precipitation in driving the proposed recharge–discharge cycle, we performed a follow-up simulation of the CGILS case, in which rain formation in the cloud microphysics scheme is artificially suppressed. Likewise, we applied the GP regression method to the mass flux time series in shallow convection during the BOMEX (Holland and Rasmusson, 1973) case, with precipitation turned off as well. In both cases, the GP regression method described in Sect. 2 failed to converge towards a single periodicity, and no prominent oscillatory behaviour could be found.
We performed a high-resolution, large-eddy simulation of tropical marine boundary-layer clouds and implemented numerical methods to analyze the temporal changes in the slope b of the cloud size distribution C(a) that reflects the state of moist convection across the modelled cloud field. LES-modelled boundary-layer clouds were conditionally sampled, and the probability distribution of cloud sizes was defined by the kernel density estimator (KDE; Parzen, 1962a). The slope b of the cloud size distribution at each time step was then obtained by a decision tree algorithm and a robust linear regression method. By applying these numerical methods to every model output, we constructed the time series of the changes in the slope b(t) for the cloud size distribution, which can be used as a proxy for the state of the modelled cloud field.
The numerical steps described in this study are taken primarily to reduce noise and numerical uncertainties involved in calculating the slope b. We also tested the cloud size distributions of a vertically projected three-dimensional cloud field (Neggers et al., 2003; Feingold et al., 2017) using a histogram, but this resulted in a very noisy time series and an unsuccessful attempt at estimating the underlying oscillation (e.g. Fig. 9 in Feingold et al., 2017). We also examined other criteria from the literature, but obtaining a stable time series for the slope b remains difficult.
Under the assumption that the noisy time series b(t) consists of a single periodic oscillation with large observational variability (Eq. 20), we retrieve the underlying trend from the observation using a GP regression model, which is then used to estimate the period of oscillation with a GP model with a periodic kernel kper. The kernel defines our a priori belief of the underlying behaviour, and the GP model optimizes the hyper-parameters, especially the period T of the oscillation, which maximizes the likelihood of the posterior distribution against the observations. We further calculate the uncertainty in the estimated periodicity using a fully Bayesian GP inference. The smooth gradient of the slope of the cloud size distribution C(a) is used as a proxy to determine the underlying behaviour of cloud size distribution, whose period is estimated to be min.
We also applied this technique to total cloud cover fc and average vertical mass flux . Using the fully Bayesian GP model, we identified min as the period of oscillation for average vertical mass flux and min for total cloud cover. Dynamic properties of the cloud field, therefore, are found to oscillate along with the cloud size distribution. The estimated periods agree well with the study involving a satellite observation of open cells (Koren and Feingold, 2013). There are other studies where the cloud field properties can be seen to show similar oscillatory behaviour, which can be identified by the GP regression method presented here; for example, the time series of cloud cover and liquid-water path (LWP) (Fig. 2 from Seifert and Heus, 2013), as well as mass flux (Fig. 4 from Plant and Craig, 2008), also appear to oscillate over time (Fig. 4).
The oscillation in the time series of the precipitation flux (Fig. 16) is also consistent with the 95 min period found for the cloud size distribution and the mass flux, suggesting that the oscillation is primarily driven by the recharge–discharge cycle in atmospheric instability (Dagan et al., 2018). The atmospheric instability is weakened (discharged) when clouds grow large and begin to precipitate, as the upper boundary layer warms due to latent heat release and the lower layer cools due to evaporation. This stabilization of the boundary layer continues until cloud growth slows down and precipitation stops. After that, surface fluxes destabilize the boundary layer from below, and the convective phase starts again due to atmospheric instability. This cycle takes roughly 95 min in the LES model run based on the CGILS S6 case. It should also be emphasized that the same periodic behaviour can be observed using the two-moment microphysics scheme, whereas the bin microphysics scheme has been used by Dagan et al. (2018). The thermodynamic processes that govern the recharge–discharge cycle seem to work consistently in multiple simulations of the boundary-layer atmosphere.
The oscillatory behaviour of precipitating marine boundary-layer clouds has been noted in the literature (Dagan et al., 2018; Feingold et al., 2017; Seigel, 2014b; Yamaguchi et al., 2019). Given that the LES model run here represents a sub-tropical shallow cumulus regime, it is not surprising that the 95 min oscillation found by our GP model is consistent with previous modelling studies of boundary-layer clouds. We initialized the model run with a pristine atmosphere (where CDNC was set to 120 cm−3), but studies have shown that changing the aerosol concentration can influence the precipitation efficiency and therefore the period of oscillation (Dagan et al., 2018; Yamaguchi et al., 2019). As the atmosphere becomes more polluted, we expect this periodicity to increase. We also observed the spatial organization of shallow convective clouds that disrupts the oscillatory evolution (Fig. 12), which can also be seen in studies modelling the boundary-layer cloud field over a smaller domain (Wang and Feingold, 2009). Reducing the size of the model domain may reduce the effect of spatial organization and make it easier to estimate the periodic behaviour of the cloud field using traditional methods. However, given that these factors can manifest even in a smaller domain, a robust method for estimating the periodicity of a noisy, non-stationary time series is still useful, especially if no smallest, optimal domain size exists in which the recharge–discharge cycle can be isolated.
Lastly, examining the changes in the vertical distribution of mass flux M can give more insight into how the cloud field mixes with the environment over time, especially because we have already examined the temporal changes in fc or , where fc=σ (Sect. 2.6). Given the results from the high-resolution, large-eddy simulation, the mass continuity of the cloud field can be examined in terms of entrainment and detrainment rates, or
for vertical mass flux M=ρwσ and rates of entrainment e and detrainment d []. We observed that both cloud fraction and vertical mass flux oscillate over time, but the latter can also be seen to lag by half a period (Sect. 3.4). Therefore, investigating how the vertical distribution of mass flux changes over time can provide valuable insights into the dynamics of shallow convection.
The SAM LES model is publicly available at http://rossby.msrc.sunysb.edu/SAM.html (last access: 12 April 2023), and the exact set of parameters for the model run and the model output, including conditionally sampled cloud sizes, can be found at https://doi.org/10.5281/zenodo.11355002 (Oh, 2024b). Jupyter notebooks, showing the detailed steps of the numerical analysis, are also available at https://doi.org/10.5281/zenodo.11356150 (Oh, 2024a).
GLO designed and ran the LES model run, carried out the numerical analysis, and prepared the paper. PHA conceptualized this project and reviewed the paper.
The contact author has declared that neither of the authors has any competing interests.
Publisher's note: Copernicus Publications remains neutral with regard to jurisdictional claims made in the text, published maps, institutional affiliations, or any other geographical representation in this paper. While Copernicus Publications makes every effort to include appropriate place names, the final responsibility lies with the authors.
We would like to thank KOPRI for kindly providing the computational resources required to perform various machine-learning tasks for this paper. This research was enabled in part by support provided by the BC DRI group and the Digital Research Alliance of Canada (https://alliancecan.ca, last access: 5 June 2025).
This paper was edited by Richard Neale and reviewed by two anonymous referees.
Angus, R., Morton, T., Aigrain, S., Foreman-Mackey, D., and Rajpaul, V.: Inferring probabilistic stellar rotation periods using Gaussian processes, Mon. Not. R. Astron. Soc., 474, 2094–2108, https://doi.org/10.1093/mnras/stx2109, 2017. a
Benner, T. C. and Curry, J. A.: Characteristics of small tropical cumulus clouds and their impact on the environment, J. Geophys. Res., 103, 28753–28767, 1998. a, b, c, d
Berg, L. K. and Stull, R. B.: Accuracy of Point and Line Measures of Boundary Layer Cloud Amount, J. Appl. Meteorol., 41, 640–650, 2002. a
Bingham, E., Chen, J. P., Jankowiak, M., Obermeyer, F., Pradhan, N., Karaletsos, T., Singh, R., Szerlip, P., Horsfall, P., and Goodman, N. D.: Pyro: Deep universal probabilistic programming, J. Mach. Learn. Res., 20, 973–978, 2019. a
Bladé, I. and Hartmann, D. L.: Tropical intraseasonal oscillations in a simple nonlinear model, J. Atmos. Sci., 50, 2922–2939, 1993. a
Blossey, P. N., Bretherton, C. S., Zhang, M., Cheng, A., Endo, S., Heus, T., Liu, Y., Lock, A. P., de Roode, S. R., and Xu, K.-M.: Marine low cloud sensitivity to an idealized climate change: The CGILS LES intercomparison, J. Adv. Model. Earth Sy., 5, 234–258, 2013. a, b
Bony, S. and Dufresne, J.-L.: Marine boundary layer clouds at the heart of tropical cloud feedback uncertainties in climate models, Geophys. Res. Lett., 32, 2055, https://doi.org/10.1029/2005GL023851, 2005. a
Bony, S., Colman, R., Kattsov, V. M., Allan, R. P., Bretherton, C. S., Dufresne, J.-L., Hall, A., Hallegatte, S., Holland, M. M., Ingram, W., Randall, D. A., Soden, B. J., Tselioudis, G., and Webb, M. J.: How Well Do We Understand and Evaluate Climate Change Feedback Processes?, J. Climate, 19, 3445–3482, 2006. a
Breiman, L., Friedman, J., Olshen, R. A., and Stone, C. J.: Classification and Regression Trees, Chapman and Hall/CRC, https://doi.org/10.1201/9781315139470, 1984. a
Bretherton, C. and Blossey, P.: Understanding mesoscale aggregation of shallow cumulus convection using large-eddy simulation, J. Adv. Model. Earth Sy., 9, 2798–2821, 2017. a
Brown, A. R.: The sensitivity of large-eddy simulations of shallow cumulus convection to resolution and subgrid model, Q. J. Roy. Meteor. Soc., 125, 469–482, 1999. a, b, c
Brown, A. R., Cederwall, R. T., Chlond, A., Duynkerke, P. G., Golaz, J. C., Khairoutdinov, M., Lewellen, D. C., Lock, A. P., MacVean, M. K., Moeng, C. H., Neggers, R. A. J., Siebesma, A. P., and Stevens, B.: Large-eddy simulation of the diurnal cycle of shallow cumulus convection over land, Q. J. Roy. Meteor. Soc., 128, 1075–1093, 2002. a
Cahalan, R. F. and Joseph, J. H.: Fractal Statistics of Cloud Fields, Mon. Weather Rev., 117, 261–272, 1989. a, b
Ceppi, P., Brient, F., Zelinka, M. D., and Hartmann, D. L.: Cloud feedback mechanisms and their representation in global climate models, WIREs Clim. Change, 8, e465, https://doi.org/10.1002/wcc.465, 2017. a, b, c
Cheng, L.-F., Dumitrascu, B., Darnell, G., Chivers, C., Draugelis, M., Li, K., and Engelhardt, B. E.: Sparse multi-output Gaussian processes for online medical time series prediction, BMC Med. Inform. Decis. Mak., 20, 152, https://doi.org/10.1186/s12911-020-1069-4, 2020. a
Clough, S. A., Shephard, M. W., Mlawer, E. J., Delamere, J. S., Iacono, M. J., Cady-Pereira, K., Boukabara, S., and Brown, P. D.: Atmospheric radiative transfer modeling: a summary of the AER codes, J. Quant. Spectrosc. Ra., 91, 233–244, 2005. a
Dagan, G., Koren, I., Altaratz, O., and Heiblum, R. H.: Time-dependent, non-monotonic response of warm convective cloud fields to changes in aerosol loading, Atmos. Chem. Phys., 17, 7435–7444, https://doi.org/10.5194/acp-17-7435-2017, 2017. a, b
Dagan, G., Koren, I., Kostinski, A., and Altaratz, O.: Organization and Oscillations in Simulated Shallow Convective Clouds, J. Adv. Model. Earth Sy., 10, 2287–2299, 2018. a, b, c, d, e, f, g, h, i, j, k, l, m, n, o, p, q, r, s
Dawe, J. T. and Austin, P. H.: Interpolation of LES Cloud Surfaces for Use in Direct Calculations of Entrainment and Detrainment, Mon. Weather Rev., 139, 444–456, 2011. a
Dickey, D. A. and Fuller, W. A.: Distribution of the estimators for autoregressive time series with a unit root, J. Am. Stat. Assoc., 74, 427–431, 1979. a, b
Durrande, N., Hensman, J., Rattray, M., and Lawrence, N. D.: Detecting periodicities with Gaussian processes, PeerJ Comput. Sci., 2, e50, https://doi.org/10.7717/peerj-cs.50, 2016. a
Feingold, G., Koren, I., Wang, H., Xue, H., and Brewer, W. A.: Precipitation-generated oscillations in open cellular cloud fields, Nature, 466, 849–852, 2010. a
Feingold, G., Balsells, J., Glassmeier, F., Yamaguchi, T., Kazil, J., and McComiskey, A.: Analysis of albedo versus cloud fraction relationships in liquid water clouds using heuristic models and large eddy simulation, J. Geophys. Res.-Atmos., 122, 7086–7102, 2017. a, b, c, d, e, f, g, h, i, j, k, l, m
Gardner, J. R., Pleiss, G., Bindel, D., Weinberger, K. Q., and Wilson, A. G.: Gpytorch: Blackbox matrix-matrix gaussian process inference with gpu acceleration, arXiv [preprint], https://doi.org/10.48550/arXiv.1809.11165, 2018. a
Garrett, T. J., Glenn, I. B., and Krueger, S. K.: Thermodynamic Constraints on the Size Distributions of Tropical Clouds, J. Geophys. Res.-Atmos., 123, 8832–8849, 2018. a
Hamilton, J. D.: Time Series Analysis. Princeton University Press, Princeton, https://doi.org/10.1515/9780691218632, 1994. a, b
Heus, T., Jonker, H. J. J., Van den Akker, H. E. A., Griffith, E. J., Koutek, M., and Post, F. H.: A statistical approach to the life cycle analysis of cumulus clouds selected in a virtual reality environment, J. Geophys. Res., 114, 97, https://doi.org/10.1029/2008JD010917, 2009. a
Hoffman, M. D. and Gelman, A.: The No-U-Turn sampler: adaptively setting path lengths in Hamiltonian Monte Carlo, J. Mach. Learn. Res., 15, 1593–1623, 2014. a
Holland, J. Z. and Rasmusson, E. M.: Measurements of Atmospheric Mass, Energy, and Momentum Budgets Over a 500-Kilometer Square of Tropical Ocean, Mon. Weather Rev., 101, 44–55, 1973. a
Iacono, M. J., Delamere, J. S., Mlawer, E. J., Shephard, M. W., Clough, S. A., and Collins, W. D.: Radiative forcing by long-lived greenhouse gases: Calculations with the AER radiative transfer models, J. Geophys. Res., 113, D13103, https://doi.org/10.1029/2008JD009944, 2008. a
Khairoutdinov, M. F. and Randall, D. A.: Cloud Resolving Modeling of the ARM Summer 1997 IOP: Model Formulation, Results, Uncertainties, and Sensitivities, J. Atmos. Sci., 60, 607–625, 2003. a
Kingma, D. P. and Ba, J.: Adam: A Method for Stochastic Optimization, arXiv [preprint], https://doi.org/10.48550/arXiv.1412.6980, 2014. a
Koren, I. and Feingold, G.: Aerosol–cloud–precipitation system as a predator-prey problem, P. Natl. Acad. Sci. USA, 108, 12227–12232, 2011. a, b
Koren, I. and Feingold, G.: Adaptive behavior of marine cellular clouds, Sci. Rep., 3, 938, https://doi.org/10.1038/srep02507, 2013. a, b
Koren, I., Tziperman, E., and Feingold, G.: Exploring the nonlinear cloud and rain equation, Chaos, 27, 013107, https://doi.org/10.1063/1.4973593, 2017. a
Kuo, K. S., Welch, R. M., Weger, R. C., Engelstad, M. A., and Sengupta, S. K.: The three-dimensional structure of cumulus clouds over the ocean: 1. Structural analysis, J. Geophys. Res., 98, 20685, https://doi.org/10.1029/93JD02331, 1993. a
Lipat, B. R., Voigt, A., Tselioudis, G., and Polvani, L. M.: Model Uncertainty in Cloud–Circulation Coupling, and Cloud-Radiative Response to Increasing CO2, Linked to Biases in Climatological Circulation, J. Climate, 31, 10013–10020, 2018. a
Machado, L. and Rossow, W. B.: Structural characteristics and radiative properties of tropical cloud clusters, Mon. Weather Rev., 121, 3234–3260, 1993. a
Machado, L. T., Desbois, M., and Duvel, J.-P.: Structural characteristics of deep convective systems over tropical Africa and the Atlantic Ocean, Mon. Weather Rev., 120, 392–406, 1992. a
MacKay, D. J. C.: Gaussian Processes – A Replacement for Supervised Neural Networks?, Lecture notes for a tutorial at NIPS, Tech. rep., https://cir.nii.ac.jp/crid/1570572699847174528 (last access: 26 June 2025), 1997. a, b, c
Malkus, J. S. and Riehl, H.: Cloud structure and distributions over the tropical Pacific Ocean 1, Tellus, 16, 275–287, 1964. a
Mauritsen, T. and Roeckner, E.: Tuning the MPI-ESM1. 2 global climate model to improve the match with instrumental record warming by lowering its climate sensitivity, J. Adv. Model. Earth Sy., 12, e2019MS002037, https://doi.org/10.1029/2019MS002037, 2020. a
Morrison, H., Curry, J. A., and Khvorostyanov, V. I.: A New Double-Moment Microphysics Parameterization for Application in Cloud and Climate Models. Part I: Description, J. Atmos. Sci., 62, 1665–1677, 2005a. a
Morrison, H., Curry, J. A., Shupe, M. D., and Zuidema, P.: A New Double-Moment Microphysics Parameterization for Application in Cloud and Climate Models. Part II: Single-Column Modeling of Arctic Clouds, J. Atmos. Sci., 62, 1678–1693, 2005b. a
Moser, D. H. and Lasher-Trapp, S.: The Influence of Successive Thermals on Entrainment and Dilution in a Simulated Cumulus Congestus, J. Atmos. Sci., 74, 375–392, 2017. a
Myers, T. A. and Norris, J. R.: Reducing the uncertainty in subtropical cloud feedback, Geophys. Res. Lett., 43, 2144–2148, 2016. a
Nair, U., Weger, R., Kuo, K., and Welch, R.: Clustering, randomness, and regularity in cloud fields: 5. The nature of regular cumulus cloud fields, J. Geophys. Res.-Atmos., 103, 11363–11380, 1998. a
Neggers, R. A. J., Jonker, H. J. J., and Siebesma, A. P.: Size Statistics of Cumulus Cloud Populations in Large-Eddy Simulations, J. Atmos. Sci., 60, 1060–1074, 2003. a, b, c, d, e, f, g, h, i
Oh, G. L.: Code for “Quantifying the Oscillatory Evolution of Simulated Boundary-Layer Cloud Fields Using Gaussian Process Regression”, Zenodo [code], https://doi.org/10.5281/zenodo.11356150, 2024a. a
Oh, G. L.: Data for “Quantifying the Oscillatory Evolution of Simulated Boundary-Layer Cloud Fields Using Gaussian Process Regression”, Zenodo [data set], https://doi.org/10.5281/zenodo.11355002, 2024b. a
Panofsky, H. A. and Brier, G. W.: Some Applications of Statistics to Meteorology, Mineral Industries Extension Services, Penn State University, Pennsylvania, 1958. a
Parzen, E.: On Estimation of a Probability Density Function and Mode, Ann. Math. Statist., 33, 1065–1076, 1962a. a, b
Parzen, E.: On estimation of a probability density function and mode, Ann. Math. Stat., 33, 1065–1076, 1962b. a
Peters, O., Neelin, J. D., and Nesbitt, S. W.: Mesoscale convective systems and critical clusters, J. Atmos. Sci., 66, 2913–2924, 2009. a
Plank, V. G.: The size distribution of cumulus clouds in representative Florida populations, J. Appl. Meteorol., 8, 46–67, 1969. a
Plant, R. S. and Craig, G. C.: A Stochastic Parameterization for Deep Convection Based on Equilibrium Statistics, J. Atmos. Sci., 65, 87–105, 2008. a
Raga, G. B., Jensen, J. B., and Baker, M. B.: Characteristics of Cumulus Band Clouds off the Coast of Hawaii, J. Atmos. Sci., 47, 338–356, 1990. a
Rasmussen, C. E. and Williams, C.: Gaussian Processes for Machine Learning, MIT Press, https://doi.org/10.7551/mitpress/3206.001.0001, 2006. a, b, c, d, e
Rasmussen, R. M., Geresdi, I., Thompson, G., Manning, K., and Karplus, E.: Freezing drizzle formation in stably stratified layer clouds: The role of radiative cooling of cloud droplets, cloud condensation nuclei, and ice initiation, J. Atmos. Sci., 59, 837–860, 2002. a
Rodts, S. M. A., Duynkerke, P. G., and Jonker, H. J. J.: Size Distributions and Dynamical Properties of Shallow Cumulus Clouds from Aircraft Observations and Satellite Data, J. Atmos. Sci., 60, 1895–1912, 2003. a
Sato, Y., Shima, S.-i., and Tomita, H.: A grid refinement study of trade wind cumuli simulated by a Lagrangian cloud microphysical model: the super-droplet method, Atmos. Sci. Lett., 18, 359–365, 2017. a, b
Sato, Y., Shima, S.-I., and Tomita, H.: Numerical Convergence of Shallow Convection Cloud Field Simulations: Comparison Between Double-Moment Eulerian and Particle-Based Lagrangian Microphysics Coupled to the Same Dynamical Core, J. Adv. Model. Earth Syst., 10, 1495–1512, 2018. a, b
Schneider, T., Teixeira, J., Bretherton, C. S., Brient, F., Pressel, K. G., Schär, C., and Siebesma, A. P.: Climate goals and computing the future of clouds, Nat. Clim. Change., 7, 3–5, 2017. a
Seifert, A. and Heus, T.: Large-eddy simulation of organized precipitating trade wind cumulus clouds, Atmos. Chem. Phys., 13, 5631–5645, https://doi.org/10.5194/acp-13-5631-2013, 2013. a, b, c, d, e, f, g, h, i
Seifert, A., Heus, T., Pincus, R., and Stevens, B.: Large-eddy simulation of the transient and near-equilibrium behavior of precipitating shallow convection, J. Adv. Model. Earth Sy., 7, 1918–1937, 2015. a, b, c
Seigel, R. B.: Shallow Cumulus Mixing and Subcloud-Layer Responses to Variations in Aerosol Loading, J. Atmos. Sci., 71, 2581–2603, 2014a. a
Seigel, R. B.: Shallow cumulus mixing and subcloud-layer responses to variations in aerosol loading, J. Atmos. Sci., 71, 2581–2603, 2014b. a, b, c, d
Sen, P. K.: Estimates of the regression coefficient based on Kendall's tau, J. Am. Stat. Assoc., 63, 1379–1389, 1968. a
Stevens, B., Satoh, M., Auger, L., Biercamp, J., Bretherton, C. S., Chen, X., Düben, P., Judt, F., Khairoutdinov, M., Klocke, D., Kodama, C., Kornblueh, L., Lin, S.-J., Neumann, P., Putman, W. M., Röber, N., Shibuya, R., Vanniere, B., Vidale, P. L., Wedi, N., and Zhou, L.: DYAMOND: the DYnamics of the Atmospheric general circulation Modeled On Non-hydrostatic Domains, Prog. Earth Planet. Sci., 6, 151–17, 2019. a
Stevens, B., Bony, S., Brogniez, H., Hentgen, L., Hohenegger, C., Kiemle, C., L'Ecuyer, T. S., Naumann, A. K., Schulz, H., Siebesma, P. A., Vial, J., Winker, D. M., and Zuidema, P.: Sugar, gravel, fish and flowers: Mesoscale cloud patterns in the trade winds, Q. J. Roy. Meteor. Soc., 146, 141–152, 2020. a
Tan, Z., Schneider, T., Teixeira, J., and Pressel, K. G.: Large-eddy simulation of subtropical cloud-topped boundary layers: 1. A forcing framework with closed surface energy balance, J. Adv. Model. Earth Syst., 8, 1565–1585, 2016. a
Theil, H.: A rank-invariant method of linear and polynomial regression analysis, 3; confidence regions for the parameters of polynomial regression equations, Indag. Math., 1, 467–482, 1950. a
Tompkins, A. M.: Organization of tropical convection in low vertical wind shears: The role of water vapor, J. Atmos. Sci., 58, 529–545, 2001. a
Twomey, S.: Pollution and the planetary albedo, Atmos. Environ., 8, 1251–1256, 1974. a
Wang, H. and Feingold, G.: Modeling mesoscale cellular structures and drizzle in marine stratocumulus. Part I: Impact of drizzle on the formation and evolution of open cells, J. Atmos. Sci., 66, 3237–3256, 2009. a, b
Wilcox, E. M. and Ramanathan, V.: Scale dependence of the thermodynamic forcing of tropical monsoon clouds: Results from TRMM observations, J. Climate, 14, 1511–1524, 2001. a
Xue, H., Feingold, G., and Stevens, B.: Aerosol effects on clouds, precipitation, and the organization of shallow cumulus convection, J. Atmos. Sci., 65, 392–406, 2008. a, b
Yamaguchi, T. and Feingold, G.: On the relationship between open cellular convective cloud patterns and the spatial distribution of precipitation, Atmos. Chem. Phys., 15, 1237–1251, https://doi.org/10.5194/acp-15-1237-2015, 2015. a
Yamaguchi, T., Feingold, G., and Kazil, J.: Aerosol-cloud interactions in trade wind cumulus clouds and the role of vertical wind shear, J. Geophys. Res.-Atmos., 124, 12244–12261, 2019. a, b, c, d, e, f
Yano, J.-I. and Plant, R.: Finite departure from convective quasi-equilibrium: Periodic cycle and discharge–recharge mechanism, Q. J. Roy. Meteor. Soc., 138, 626–637, 2012. a
Zelinka, M. D., Myers, T. A., McCoy, D. T., Po-Chedley, S., Caldwell, P. M., Ceppi, P., Klein, S. A., and Taylor, K. E.: Causes of higher climate sensitivity in CMIP6 models, Geophys. Res. Lett., 47, e2019GL085782, https://doi.org/10.1029/2019GL085782, 2020. a
Zhang, M., Bretherton, C. S., Blossey, P. N., Austin, P. H., Bacmeister, J. T., Bony, S., Brient, F., Cheedela, S. K., Cheng, A., Del Genio, A. D., De Roode, S. R., Endo, S., Franklin, C. N., Golaz, J.-N., Hannay, C., Heus, T., Isotta, F. A., Dufresne, J.-L., Kang, I.-S., Kawai, H., Köhler, M., Larson, V. E., Liu, Y., Lock, A. P., Lohmann, U., Khairoutdinov, M. F., Molod, A. M., Neggers, R. A. J., Rasch, P., Sandu, I., Senkbeil, R., Siebesma, A. P., Siegenthaler-Le Drian, C., Stevens, B., Suarez, M. J., Xu, K.-M., von Salzen, K., Webb, M. J., Wolf, A., and Zhao, M.: CGILS: Results from the first phase of an international project to understand the physical mechanisms of low cloud feedbacks in single column models, J. Adv. Model. Earth Sy., 5, 826–842, https://doi.org/10.1002/2013MS000246, 2013. a, b
Zhao, G. and Di Girolamo, L.: Statistics on the macrophysical properties of trade wind cumuli over the tropical western Atlantic, J. Geophys. Res., 112, 847, https://doi.org/10.1029/2006JD007371, 2007. a, b
Zuidema, P., Li, Z., Hill, R. J., Bariteau, L., Rilling, B., Fairall, C., Brewer, W. A., Albrecht, B., and Hare, J.: On trade wind cumulus cold pools, J. Atmos. Sci., 69, 258–280, 2012. a, b