the Creative Commons Attribution 4.0 License.
the Creative Commons Attribution 4.0 License.
 | 25 Oct 2024
| 25 Oct 2024
Learning from conceptual models – a study of the emergence of cooperation towards resource protection in a social–ecological system
Saeed Harati-Asl
Liliana Perez
Roberto Molowny-Horas
Engaging ecological resource users in intervention to protect resources is challenging for governments due to the self-interest of users and uncertainty about intervention consequences. Focusing on a case of forest insect infestations, we addressed questions of resource protection and environmentally responsible behavior promotion with a conceptual model. We coupled a forest infestation model with a social model in which a governing agent applies a mechanism for the recognition and promotion of environmentally responsible behavior among several user agents. We ran the coupled model in various scenarios with a reinforcement-learning algorithm for the governing agent as well as best-case, worst-case, and random baselines. Results showed that a proper recognition policy facilitates emergence of environmentally responsible behavior. However, ecosystem health may deteriorate due to temporal differences between the social and ecological systems. Our work shows it is possible to gain insight about complexities of social–ecological systems with conceptual models through scenario analysis.
- Article
(2584 KB) - Full-text XML
- BibTeX
- EndNote





1.1 A governance problem in sustainable development
Sustainable development is defined as development that meets the needs of the present time without sacrificing the ability of future generations to meet their needs (Brundtland, 1987). The criteria for such development are known to have social, ecological, and economic dimensions (Brown et al., 1987; Barbier, 1987). In the present study we are interested in a group of sustainable-development problems wherein a government seeks help from users of a natural resource which is at risk to protect that resource. From the government's viewpoint, it is ideal that the users find the motivation to cooperate with the government. However, such motivation may not come out of the users' sense of altruism (Kaplan, 2000). One possible way to build that sense of cooperation may be to offer a financial incentive, but that may not be enough to create long-lasting motivation for environmentally responsible behavior either (De Young, 2000; Katzev and Johnson, 1987). Moreover, experience shows that using authority to enforce environmentally responsible behavior may fail (Blundell and Gullison, 2003; Feeny et al., 1990; Wagner, 2004; Wittemyer et al., 2011). Therefore, in the ideal situation in the government's view, users should voluntarily adopt a behavior that implies costs to them, without the governing entity needing to use force or financial incentives. In addition, in that ideal situation, the said behavior successfully protects the natural resource. These considerations give rise to a question: is such an ideal situation possible?
In this paper, our interest is in a particular type of the abovementioned sustainability problems, where the ecological system is a forest resource that is attacked by a pest and the social system includes users of the resource and a governing entity. We assume a case where the users are logging companies and the government wants them to cut specific parts of the forest and create buffer zones to control the spread of the pest. This problem is multi-disciplinary: it involves land change science (Lambin et al., 2006) in the study of changes in the ecological system; it relates to the domains of collective action (Nyborg et al., 2016; Ostrom, 2009) and social norms (Farrow et al., 2017; Nyborg et al., 2016) in the analysis of the formation of a common behavior among users; it entails the field of social–ecological systems (Liu et al., 2007; Ostrom, 2009) in the endeavor to understand the dynamics that emerge through coupling the society with the forest; and, in a broader view, this problem and the question of how to address it are in the realm of complex systems (Cosens et al., 2021; Filotas et al., 2014).
1.2 Background from multiple disciplines
Complex systems are entities composed of elements and interactions that make the system behave as a whole, with characteristics such as self-organization, nonlinearity, emergence, feedback, and path dependence (O'Sullivan, 2004). Because of these characteristics, the dynamics of complex systems involve novelty and surprise (Batty and Torrens, 2005). This causes a concern in problems of sustainable development, as they typically involve intervention in or experimentation with complex systems, particularly social–ecological systems. Due to the uncertainty and complexity that are inherent in these systems meaning that intervention in these systems may have unanticipated, irreversible, and adverse effects, it is not always ethically and logistically justifiable to perform trial-and-error experiments on them (Kriebel et al., 2001). This concern justifies learning by modeling and simulation (Janssen and Ostrom, 2006a).
Societies and ecosystems are complex systems. When a society uses a natural resource, the link between the two systems creates a larger complex system, referred to as a social–ecological system (Berkes and Folke, 2000). Social–ecological systems (SESs) demonstrate complexities that cannot be understood through the lens of sociology or ecology alone (Liu et al., 2007). In a typical SES, the society receives ecosystem services (Daily, 2000; Millennium Ecosystem Assessment, 2003) and makes changes in the ecosystem. To combine social and ecological knowledge in the analysis of the complexity of SESs, a framework has been developed which accounts for governance and resource systems at larger scales, as well as users and resource units at smaller scales (Ostrom, 2009). This framework has been implicit in sustainability studies in a variety of domains such as sustainable navigation (Parrott et al., 2011), fisheries (Schlüter et al., 2014), and forest management (Wimolsakcharoen et al., 2021).
Many studies of complex systems involve building and using models that replicate some aspects of those systems (Railsback and Grimm, 2012; Wolfram, 2002). Simulations of complex systems are often built with a bottom-up approach, using methods such as agent-based models (ABMs) and cellular automata (CA) models (Grimm et al., 2005). An ABM is made up of several computer-programmed agents that interact with each other and their environment and act upon their decision rules (Castle and Crooks, 2006). A CA model is composed of a grid of cells where the state of each cell is defined by a rule based on the previous states of that cell and its neighbors (White and Engelen, 1993). ABMs have been used in a wide variety of complex systems studies, such as epidemiology (Perez and Dragicevic, 2009), animal movement (Bonnell et al., 2013), land development (Pooyandeh and Marceau, 2013), and forest disturbance (Perez and Dragicevic, 2010; Katan and Perez, 2021). Likewise, CA have been used in research works within fields such as land change (National Research Council, 2014; Lambin and Geist, 2006), urban growth (Batty et al., 1999; Clarke et al., 1997; de Almeida et al., 2003), and forest disturbance (Bone et al., 2006; Gaudreau et al., 2016).
The emergence of specific behaviors in a society is a subject of study in the field of social norms. Several definitions of norms have been stated in the literature of the social sciences. In one definition, norms are cultural rules that guide people in their behavior (Ross, 1973). In another definition, norms are social rules that govern the encouragement or condemnation of certain behaviors (Savarimuthu and Cranefield, 2011). Norms have also been defined in the context of institutions (Ostrom, 1990; Crawford and Ostrom, 1995) as valuations of actions regardless of the immediate consequences of the actions. Institutions can formalize norms by converting them to regulations (North, 1990). In yet another view, norms are classified as descriptive and injunctive. Descriptive norms show what others do, whereas injunctive norms show what others approve of (Cialdini et al., 1990). A review of the literature on SES governance indicates that social norms largely influence environmentally responsible behavior (Bourceret et al., 2021). The literature also highlights that the emergence of environmentally responsible behavior in a society depends on what the individuals do and what they favor (Nyborg et al., 2016), which, according to the above definitions, are the equivalents of descriptive and injunctive norms, respectively.
1.3 Setting, questions, and objectives
In this study we are interested in a SES governance problem. We consider a setting where the government needs the participation of users of a forest in a management action with the aim of protecting the forest against infestation outbreaks. To clarify the scope of the problem, we state the following assumptions:
-
The forest is at risk, and the state of health of the forest urges the government to act towards its protection.
-
The expected action to protect the forest can only be performed by the users but is costly for them.
-
The users are driven by self-interest and not by altruism.
-
The government cannot offer financial incentives for the purpose of enticing the cooperation of the users.
-
The government cannot enforce its authority and oblige the users to cooperate with it.
-
Users have a desire for a good reputation, which motivates them to perform environmentally responsible behavior. However, there is no social sanction or punishment for individuals who do not demonstrate responsible behavior.
-
The government's knowledge of the social system is limited. It does not know the decision criteria of the users.
-
The government's knowledge of the ecosystem is limited. Although the government wishes to intervene and protect the forest, the government is not certain about the consequences of its desired intervention.
In previous works we developed an ecological model of outbreaks of a forest insect infestation (Harati et al., 2020, 2021b) and a social model of the promotion of a new behavioral norm (Harati et al., 2021a). In the present work we combine the above two models to gain insight about a particular intervention measure to control the spread of infestations. The intended measure is to encourage forest users to voluntarily create buffer zones in the vicinity of newly observed infestations.
In a SES, the ecological and social systems are each the variable environment of the other. This matter creates complexities, which, in the particular case of our study, give rise to the following questions: if forest users fully cooperate with the governing entity, will the creation of buffer zones be effective in suppressing the spread of infestations in the forest? Will forest users cooperate with the governing entity? In the case of partial cooperation of users with the governing entity, how will the infestations spread in the forest? Considering these questions, the objectives of this study are
-
to build a SES model by coupling the abovementioned social and ecological models;
-
to perform hypothetical experiments by implementing management scenarios in simulations of the SES;
-
to interpret the outcome of the hypothetical experiments and, subsequently, to gain insight about (1) the abovementioned recognition scheme and its potential for the promotion of environmentally responsible behavior and (2) the state of health of the ecological resource in response to the social dynamics that emerge from the recognition scheme.
To answer the questions raised in the Introduction, we take a conceptual modeling and scenario analysis approach. The SES governance literature highlights the use of conceptual models for gaining insight about complex SES problems (Janssen and Ostrom, 2006b). The environment in which we run hypothetical experiments is a conceptual model, which is constructed by coupling two previously developed base models. These comprise the ecological and social components of our coupled model. The coupled model does not have an economic component. In this section we introduce the base models, the mechanism for coupling the base models, and the scenarios for testing the coupled model. Appendix A presents further details of the models according to the ODD + D protocol, which is an extension of the ODD (overview, design concepts, details) protocol particularly adapted for describing human decisions in ABMs (Müller et al., 2013). The ODD protocol is a standard for the communication of information about ABMs (Grimm et al., 2006, 2010, 2020).
2.1 Ecological model
This model (Harati et al., 2020, 2021b) simulates the spread of a forest insect infestation. The model is built based on observed data of the mountain pine beetle outbreaks in the province of British Columbia in western Canada. In this model, the study area is represented as a grid with each cell containing geospatial information as well as binary data on the presence or absence of infestation. For each cell, based on its geographic variables and distance-weighted sums of infestations in its neighborhood, the model predicts the state of infestation in the next time step. This model uses logistic regression because this machine learning algorithm is fast and suitable for applications with binary response variables. Model calibration is dependent on the study area. In this work, the study area is a division of the Kamloops Timber Supply Area in British Columbia, Canada, with an extent from 50°45′22′′ N, 120°19′59′′ W to 51°32′40′′ N, 119°6′0′′ W. Figure 1 shows the study area.

Figure 1Study area of forest insect infestation simulation in British Columbia, Canada. Locations of active infestations at the beginning of the simulation period are marked as “Insects at start”. Locations that were infested before the start of simulations are marked as “Previously infested”.
2.2 Social model
This conceptual model simulates interactions between individuals in a problem known as the principal–agent problem and provides insight into the emergence of social norms. In the principal–agent problem, the goal of one or more principals is that one or more agents perform a certain behavior (Braun and Guston, 2003). In our social model, the desire for a good reputation is used as a motivation for agents to perform the behavior that the principal desires. In this conceptual setting, the principal grants recognition to agents who act as the principal requests. The model runs in discrete time steps. In each time step the principal chooses the cost of its request from the agents. Specifically, the principal makes a binary choice between a costly request and a no-cost request. The agents, on the other hand, compare the cost of the requested action with the benefit of receiving recognition and decide whether or not to cooperate with the principal. Agents assess the benefit of recognition as a function of (1) the existing awareness in their society of such recognition and (2) the expectation of uniqueness among their peers if they obtain recognition in the next time step. This design is inspired by the existing literature, which underscores the importance of personal motivations such as a good reputation in voluntary action (Omoto and Snyder, 1995; Stern et al., 1993) and the importance of the visibility of one's actions in one's behavioral choices in society (Mosler, 1993; Nyborg et al., 2016). Our approach is based on the theory of normative conduct (Cialdini et al., 1990).
The model uses a temporal-difference reinforcement-learning algorithm named double expected Sarsa to develop a decision-making guideline for the principal. Input to this decision guideline is the behavior of agents, and output is the binary choice of action to request, i.e., costly or no-cost. The objective of the algorithm is that by the end of simulations, an acceptable proportion of agents cooperate with the principal in its costly request. Such an acceptable proportion is assumed to be 0.5 in this study in order to represent the choice of the majority. In reinforcement-learning literature, the decision-making guideline developed and used through the algorithm is called policy. In the study presenting the social model (Harati et al., 2021a), three levels – low, medium, and high – were assumed for the cost of the principal's costly request. Note that each of these levels is contrasted with a no-cost action in the binary decisions of the principal. For each of the above three levels, the model was run and the corresponding policy was calculated.
A remark on the use of terms is necessary. The word agent from the principal–agent literature should not be confused with the same word in agent-based model (ABM) literature. Our social model is agent-based, and we inevitably use ABM terminology when describing and referring to our model. Therefore, in order to avoid confusion, in our model description we use the terms governing agent for principal and user agent for agent.
Decisions of user agents are based on simple “if statements”. User agents seek uniqueness and value in their actions. To that end, they assess scores for the expected uniqueness and value associated with performing the governing agent's request. Then user agents multiply the uniqueness and value scores. Assessment of uniqueness is based on the immediate past. For example, if no other user showed responsible behavior in the previous time step, a full score of uniqueness is assumed for the respective action in the present time step. Assessment of value is based on the cumulative past. It represents the total number of times responsible users have been recognized in the society. For example, if in all previous time steps, responsible behavior was observed and rewarded in the society, a full score of value is assumed for responsible behavior in the present time step. In each time step, each user agent compares the product of uniqueness and value scores with a threshold that is a private property of that user agent. Based on that comparison, the user agent decides whether to cooperate with the governing agent or not.
2.3 Coupled social–ecological model
In this work we added a coupling mechanism to the above two models and built a conceptual social–ecological model to simulate a hypothetical setting. In this setting, in the ecological model, the forest is attacked by mountain pine beetle (MPB). These attacks spread in each iteration of the model, which represents 1 year. In the conceptual social model, there is a governing agent whose goal is to stop the spread of infestations and several user agents, who represent logging companies. The governing agent intends to create a buffer zone between insects and healthy forest by cutting the forest in the vicinity of newly observed infestations. This intervention measure is difficult and costly, and the governing agent intends to use the social model's recognition mechanism (Harati et al., 2021a) and encourage user agents to voluntarily perform the intervention action. Each user agent of the social model is assigned to a part of the simulated forest of the ecological model. Decisions of the user agents are implemented in their respective forest areas in simulations.
A feature of our simulations was the definition of the management action. Cutting neighborhoods of infestations is only one of the possible actions to control infestations (Maclauchlan and Brooks, 1994). Our inspiration for choosing this action came from a previous work in which we performed spatial analyses of the spread of MPB infestations and validation tests on our land change model (Harati et al., 2021b). In that work, we noted that most of the new MPB infestations occur in the vicinity of previous locations of attacked trees. Therefore, in the present study we defined neighborhoods of management action around newly observed infestations. The action was to cut the cells in these neighborhoods. Our choice of neighborhood size was also inspired by distance analysis in that previous work (Harati et al., 2021b) as well as the consideration that the governing agent cannot detect new infestations in the first time step after their occurrence. This is due to the fact that infested trees do not change color in the first year after attack. It follows that infestations spread further in a larger neighborhood before the governing agent is aware of their previous locations.
Through the course of MPB infestations, British Columbia (BC) eventually adopted the policy of increasing the allowable annual cut, first in order to suppress the infestations and later to facilitate salvage harvesting in infested areas (Forest Practices Board, 2007, 2009). Such an increase was smaller than in the simulations of the present study. In severely infested areas of the province, the allowable annual cut was increased by 80 % of the pre-infestation levels (Forest Practices Board, 2007, 2009), which was less than one-third of a percent of the forest area (BC Ministry of Forests, 2003).
Cutting trees on a large scale can be a practical challenge. According to an analysis of data of the year 2008, with that year's rate of harvesting, it would take 22 years to cut the pine trees that were killed by infestations up to 2008 (Forest Practices Board, 2009). Moreover, although the government wanted the added harvesting to be concentrated in severely infested areas to control the pest, the forest industry preferred to harvest from other locations and especially from forest stands with mixed species (Forest Practices Board, 2007). Furthermore, the decision to increase the allowable annual cut raised concerns about possible ecological impacts (Forest Practices Board, 2007, 2009), which is beyond the scope of the present work and can be studied in future research.
In each iteration of the model, the governing agent decides whether or not to ask the user agents to do its intended action, that is, cutting trees around newly observed infestations. In cases where the governing agent asks for that action, it grants recognition to cooperating users. Such recognition is a “responsible user” label. In cases where the governing agent does not ask for cooperation in the intervention measure, the governing agent grants recognition labels to all user agents. On the other hand, each user agent, when requested to perform the intervention measure in exchange for the recognition label, makes a decision by comparing the cost of the requested action versus the benefit of recognition. The cost of action is assessed based on the forest area to be cut by the user, and the value of the recognition label is assessed based on the society's knowledge of that label as well as on the expectation of being unique in having that label in the next time step.
In the making of the model, we noticed that before the emergence of cooperative behavior in the social model, the forest would be largely infested in the ecological model. While this observation was insightful, it also showed that our simulations were reduced to runs of the ecological model alone. In other words, in the absence of intervention from the social model, the ecological model would simulate the spread of infestations as if the two models were not connected. Because our interest was to study the complexities that arise from the interactions between the two models, we added a new feature in our setup. We defined preparation steps during which the social model ran alone before being coupled to the ecological model. The preparation steps can be considered awareness campaigns in the society. Through these steps, the governing agent and user agents interact according to the rules of the social model (Harati et al., 2021a). Consequently, user agents become familiar with the recognition mechanism and the “responsible user” label.
To implement the idea of coupling the two models, we defined a mechanism which we named “flip-flop”. Recall that the ecological and social models are run in R and Java environments, respectively. To each model we allocated a directory, named “Inbox”, on the computer hard disk. Each iteration of the coupled model begins with the ecological model simulating the spread of infestations and, while the social model waits in a loop, constantly checking its Inbox for a new message. Based on newly observable infestations in the simulation, the ecological model produces a report indicating the size of the intervention buffer zone in each user agent's designated forest area. This report, which is a text file, is then copied into the Inbox directory of the social model. At this point, the social model notices the new file in the Inbox folder, exits the waiting loop, reads the file, and proceeds to simulate interactions between governing and user agents. Contents of the received file are needed in the cost–benefit analyses performed by user agents. The social model, in turn, produces a report indicating the user agents who intend to cut trees in the intervention buffer zone of their respective forest areas. This report, also a text file, is copied into the Inbox folder of the ecological model, which by this time has been waiting in a loop and constantly checking its Inbox for a new message. The ecological model then exits its waiting loop, reads the file sent by the social model, and accordingly changes the landscape of simulations by eliminating forest cover in buffer zones in areas associated with indicated user agents. Such an updated landscape will be the basis for simulations of the next time step. Figure 2 depicts the concept of the flip-flop mechanism for coupling the two models, and Fig. 3 shows a more detailed view of the coupled model.
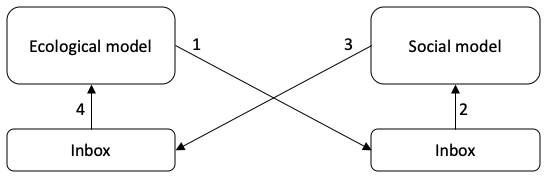
Figure 2The flip-flop mechanism. Each of the two models requires input from the other model. The models communicate with each other via Inbox directories. Arrows show the direction of data transfer. Numbers beside the arrows show the order of operations.
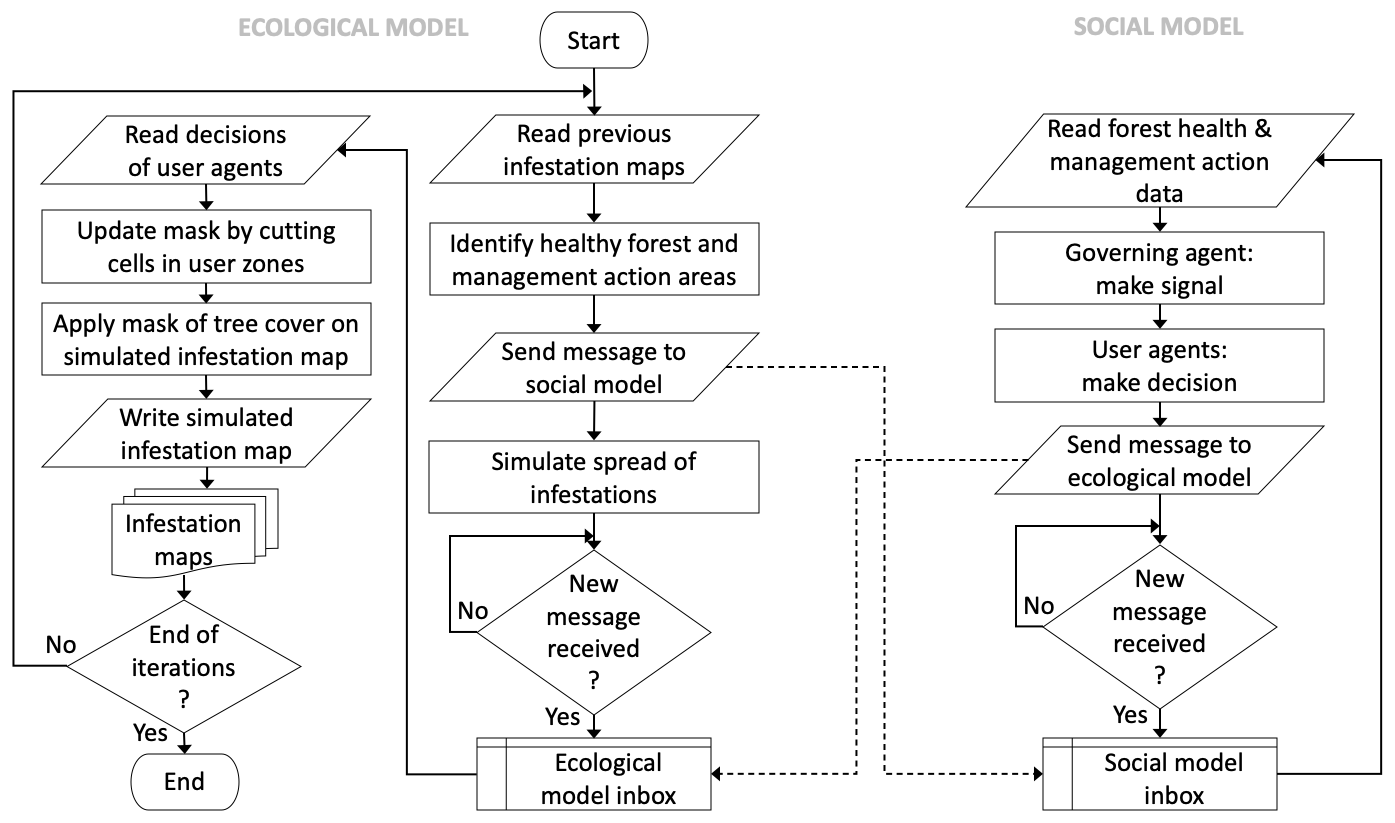
Figure 3The coupled model. In each time step, the ecological model begins with reading previous infestation maps and ends with writing a newly simulated infestation map; the social model begins with waiting for a message from the ecological model and ends with sending a message to the ecological model.
2.4 Simulation scenarios
In order to gain insight about the emergence of environmentally responsible behavior in the setting described above, we ran several rounds of simulations with different scenarios. We defined scenarios so that the comparison of their results provides useful information about the subject of study. Below are descriptions of these scenarios.
- 1.
The simplest scenario is named “Business as Usual” (BAU), in which there is no intervention from the governing agent to control the disturbance. In each time step, user agents harvest a proportion of their allocated zones. That proportion is the business-as-usual harvest ratio, which is a model parameter. The spatial ecological model iteratively simulates the spread of infestations, noting that harvested grid cells cannot become infested anymore. In this scenario, the governing agent's reinforcement-learning (RL) algorithm is not engaged. This scenario indicates a case where there is no government intervention to control the insect disturbance or a case where user agents never cooperate with the governing agent. Hence, this scenario serves as a baseline for comparison with the main simulations.
- 2.
Another baseline in our study is a scenario in which all user agents always cooperate fully with the governing agent. This scenario, which we named “Enforce”, provides a best case for the social component of our study. The Enforce scenario shows the effectiveness of the management plan in the control of the disturbance. In this scenario the governing agent's RL algorithm is not engaged.
- 3.
Our main scenarios, which we named “Suggest”, are those in which the governing agent is active and uses its RL algorithm. In Suggest scenarios, the governing agent suggests that if user agents cooperate with it in the management action, then they will receive “responsible user” labels. User agents then analyze the governing agent's suggestion and make their decisions. In terms of the cooperation of user agents with the governing agent, the Suggest scenarios are between BAU and Enforce. The neighborhood of management action is a Moore neighborhood of the newly visible infestations. The size of this neighborhood is a model parameter. We ran simulations with a neighborhood of size 4 grid cells. We also defined preparation runs, in which the ecological model is not engaged. Instead, agents in the social model interact with each other, which results in the increased visibility and value of the “responsible user” label. Thereupon, the following three scenarios were defined:
-
Suggest scenario with 0 preparation time steps (Suggest-Prep0)
-
Suggest scenario with 10 preparation time steps (Suggest-Prep10)
-
Suggest scenario with 20 preparation time steps (Suggest-Prep20).
-
-
Corresponding to each Suggest scenario, we defined another baseline, in which the governing agent behaves randomly instead of using its RL algorithm. In these scenarios, which we named Random, user agents analyze and respond to the governing agent's signals, as in the Suggest scenarios. The calculation of the state of health of the resource and the costs of management action in user agent zones are performed similarly to in the Suggest scenarios. The only difference between Suggest and Random scenarios is in the decision-making mechanism of the governing agent. In this sense, by showing what could be achieved with a naïve model, Random scenarios serve as a baseline to indicate the power of the sophisticated RL algorithm of the governing agent. Thereby, the following three scenarios were defined:
-
Random scenario with 0 preparation time steps (Random-Prep0)
-
Random scenario with 10 preparation time steps (Random-Prep10)
-
Random scenario with 20 preparation time steps (Random-Prep20).
-
Figure 4 shows the mean maps of remaining infestations in the simulated scenarios at the final time step. It can be seen that, without preparation, the Suggest and Random scenarios are similar to BAU. On the other hand, with addition of preparation steps, less infestation remains in the study area. The figure also shows that in Suggest scenarios, less infestation remains in comparison with Random scenarios.
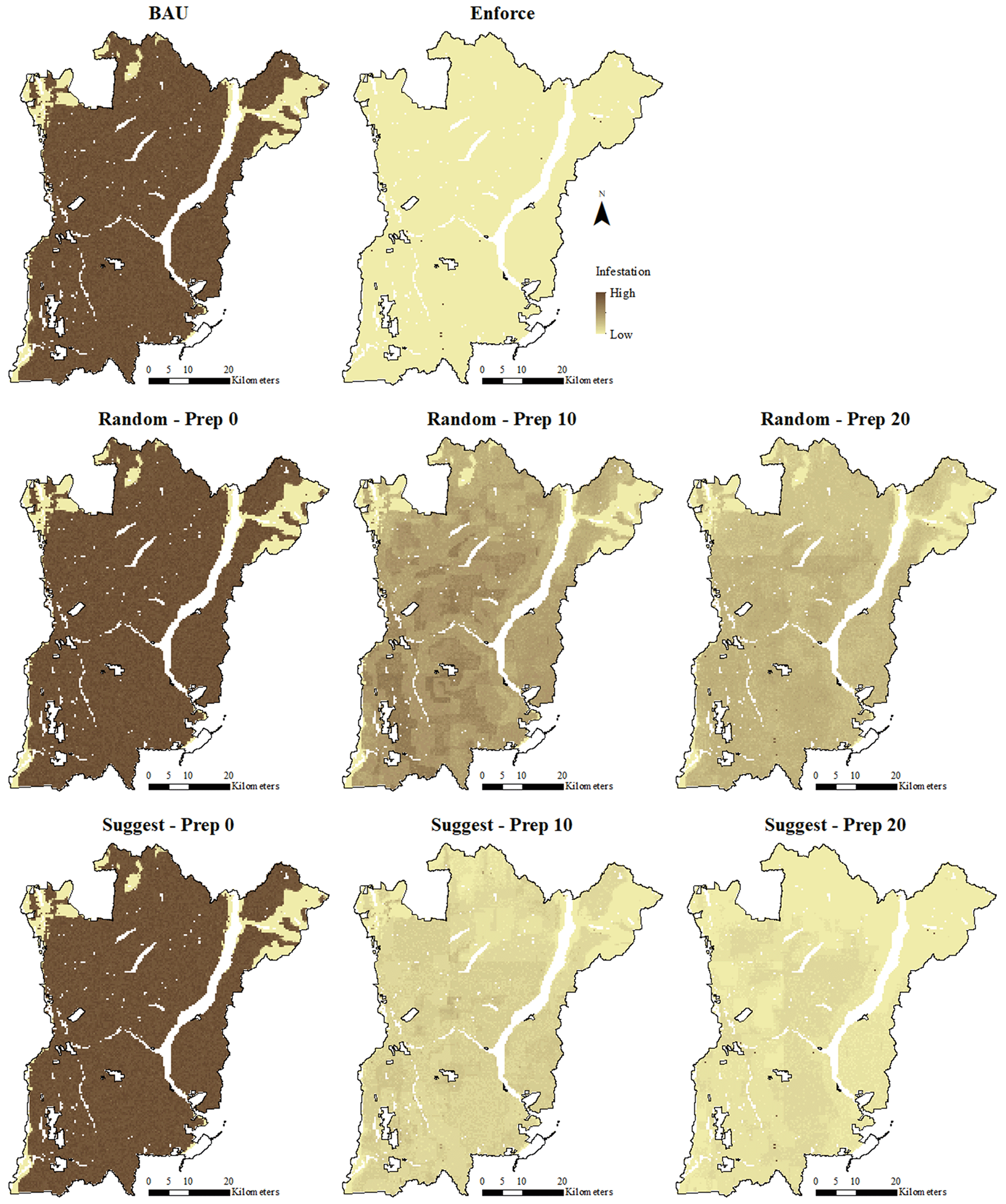
Figure 4Maps of mean remaining infestation after the final time step of simulations. The Enforce scenario was run once, and all other scenarios were run 50 times. For each scenario, “High” infestation in a cell means the presence of infestation in the cell in all runs of that scenario and “Low” infestation means the absence of infestation in the cell in all runs of that scenario.
Figure 5 shows the mean ratio of the cooperation of user agents with the governing agent over time steps of Suggest and Random scenarios. Without preparation of the user agents, both Suggest and Random scenarios end with nearly no cooperation at all. Therefore, in these cases no management action is performed to control the infestations, which explains why the maps of no-preparation scenarios are similar to the map of BAU. With preparation, the cooperation ratio increases in both Suggest and Random scenarios, with Suggest scenarios showing higher cooperation than Random ones. Nonlinear behavior is observed in the curves of Suggest and Random scenarios with 10 steps of preparation, which shows a sudden emergence of cooperation with the governing agent.

Figure 5Mean cooperation ratio over time for Suggest and Random scenarios with 0, 10, and 20 preparation steps. Each scenario was run 50 times.
Figures 6 and 7 show the mean proportions of the study area that are covered by healthy and infested forest, as well as the area that is cut, in each time step. The baseline scenarios BAU and Enforce, which are shown in Fig. 6, indicate the maximum amount of forest that can be saved from infestation if the management action is successfully implemented. The Random and Suggest scenarios, shown in Fig. 7, demonstrate interim situations where the management action is partly implemented. The plots of Random and Suggest scenarios also show the results of adding preparation steps in the simulations.
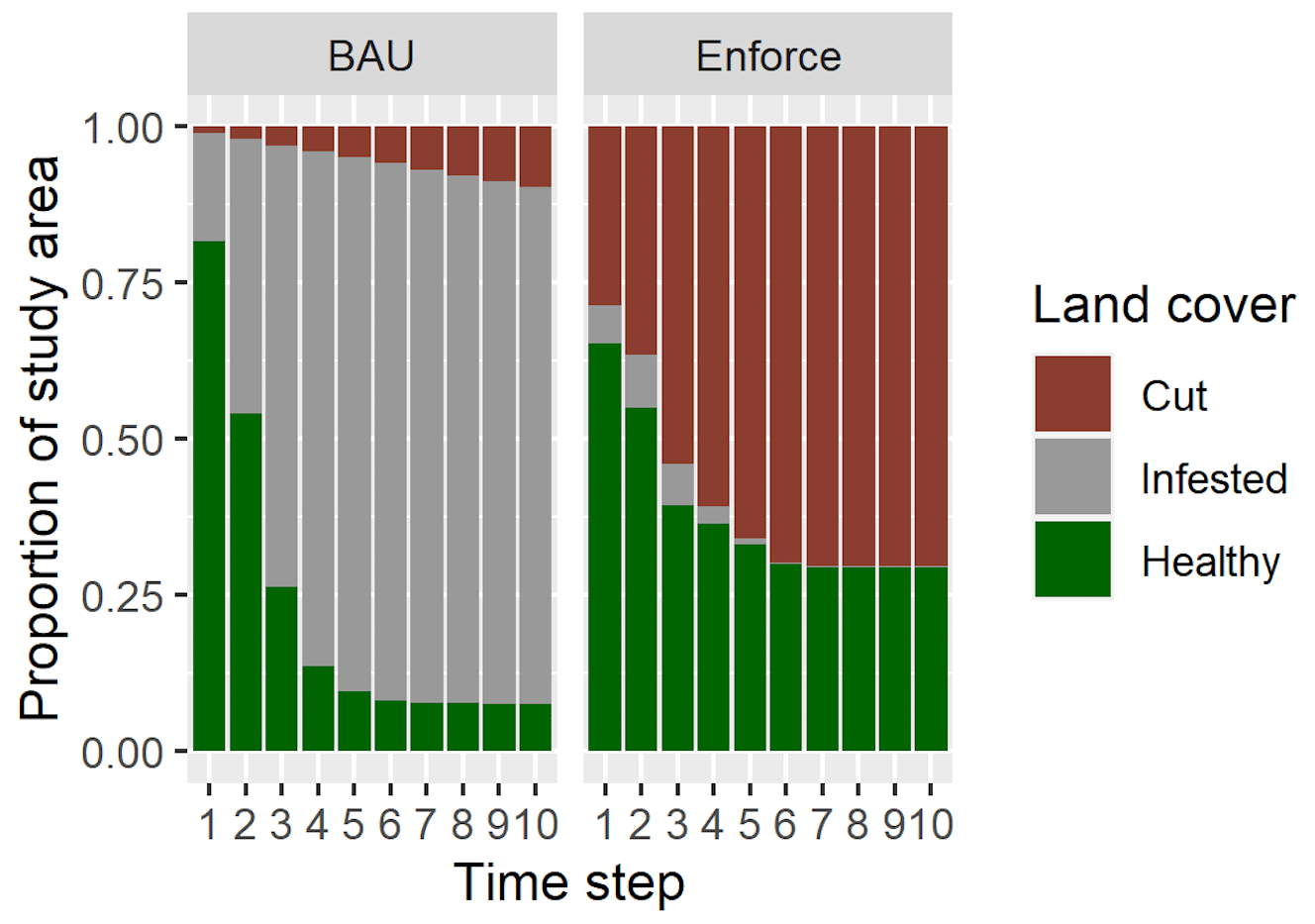
Figure 6Proportions of healthy, infested, and cut areas in BAU and Enforce baseline scenarios.
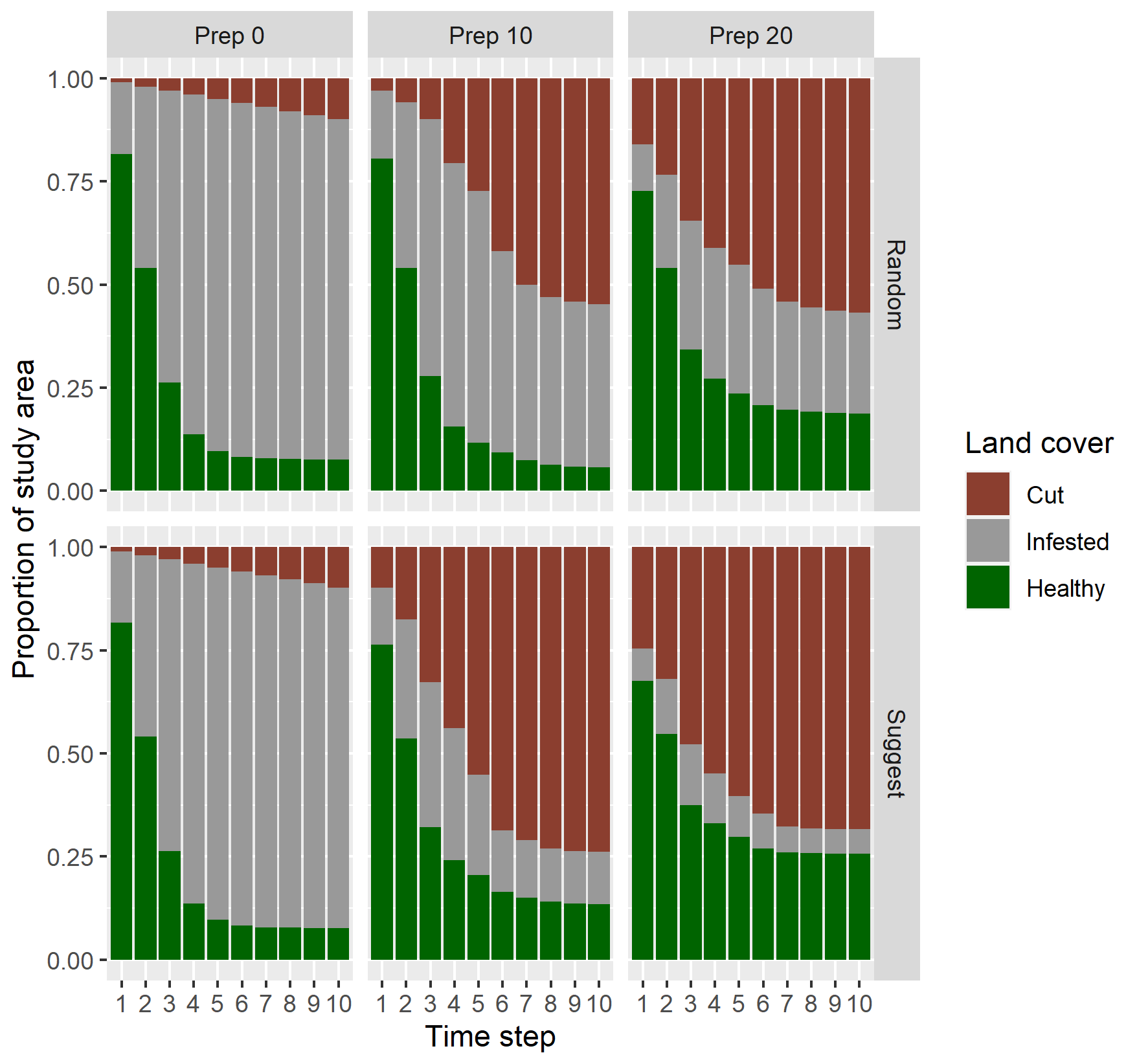
Figure 7Proportions of healthy, infested, and cut areas in Random baseline and Suggest scenarios. Each plot represents 50 runs.
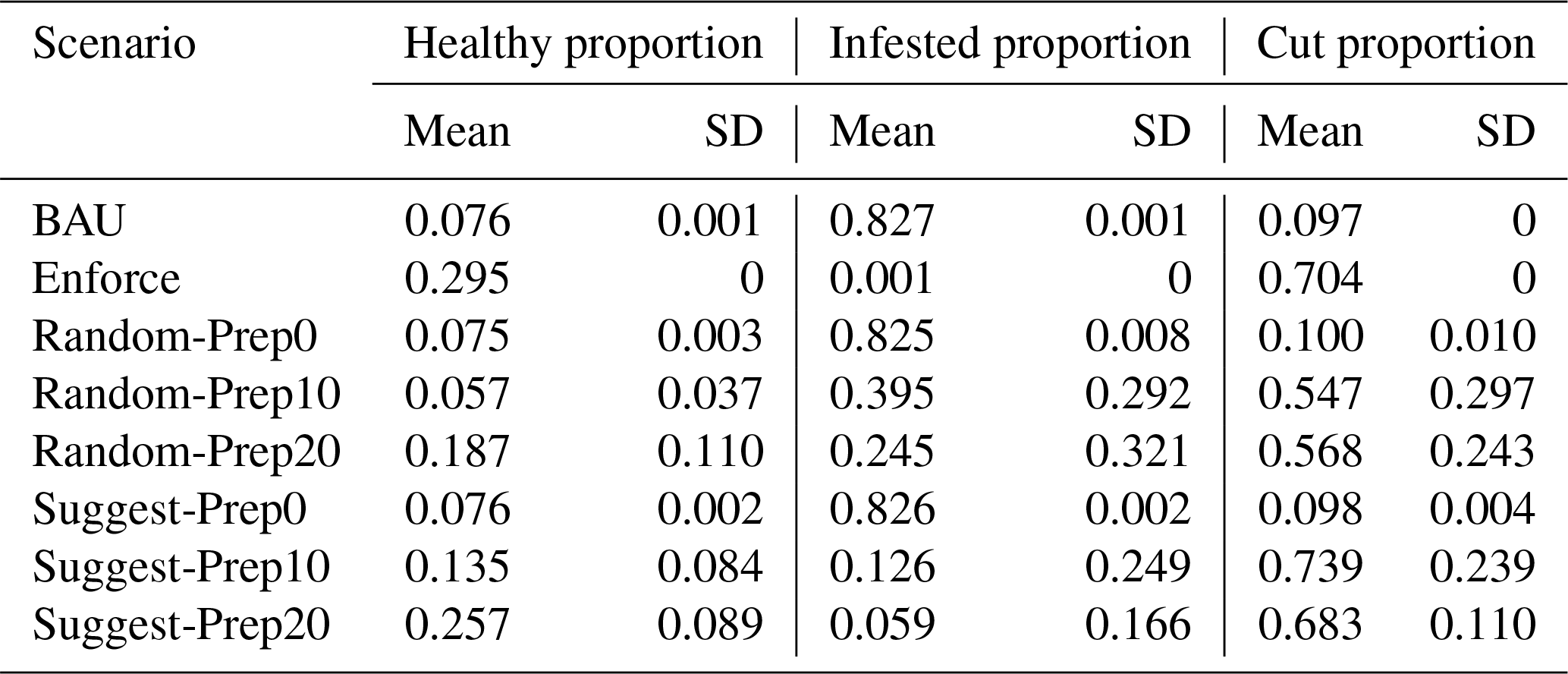
Table 1 gives a quantitative summary of the proportions of healthy, infested, and cut area at the end of the simulations. Note that the Enforce scenario was run only once because it involves no stochasticity in the decisions of agents. This is why there is no deviation in the results of this scenario. The mean values in this table correspond to the final time step in the plots of Figs. 6 and 7. The standard deviations reveal several things about variations in the results. Firstly, variations are minimal in the BAU scenario, as well as in Random and Suggest scenarios with no preparation. These are the scenarios in which user agents rarely cooperate with the governing agent, and therefore, the management action is not implemented. Variations in results increase substantially when preparation steps are included in simulations. Secondly, variations in the proportion of healthy area are smaller than variations in proportions of infested and cut areas. Thirdly, variations in Suggest scenarios are smaller than variations in Random scenarios. This is particularly evident in scenarios with 20 preparation steps. The table shows that, in comparison with the Random baseline scenarios, the Suggest scenarios result in a higher proportion of healthy forest at the end of the simulations, with smaller variations in results.
Table 1Mean and standard deviation of the final proportions of healthy, infested, and cut areas in simulations. Each scenario was run 50 times, except for Enforce, which was run once.
It can be seen in Figs. 6 and 7 as well as Table 1 that results of the no-preparation scenarios are similar to BAU. On the other hand, as shown in Fig. 5, in runs with more preparation steps, the percentage of cooperation of user agents with the governing agent increases. Such an increase is larger when the governing agent's decisions are made by the RL algorithm, i.e., in Suggest scenarios. Comparing the zero-preparation and 20-step-preparation scenarios in Figs. 6 and 7, it is evident that the 20 time steps of preparation lead to an increase in the remaining healthy forest, even when the governing agent's decisions are random. Considering all cases with the preparation of user agents, it can be observed that more healthy cells are saved in Suggest scenarios, i.e., with a RL decision-making algorithm for the governing agent, than in Random scenarios, i.e., with random decisions. The case of 10-step preparation with random decisions of the governing agent is particularly noteworthy. In this scenario, first the infestation spreads to large areas and then the management action begins, which involves cutting large areas around the newly observed infestations. Consequently, the remaining healthy forest in this scenario is even slightly smaller than BAU.
Tables 2 and 3 summarize non-parametric Wilcoxon signed-rank tests that were performed to statistically analyze simulation results. Scenarios were compared in terms of the proportions of remaining healthy forest after the final time step of their respective simulations. As can be seen in Table 2, the proportions of remaining healthy forest in scenarios Suggest-Prep10, Suggest-Prep20, and Random-Prep20 are greater than in BAU. Likewise, in comparison with Enforce, all scenarios lead to significantly lower proportions of remaining healthy forest, except for Suggest-Prep20. In other words, the result of Suggest-Prep20 is very similar to our best cooperation case baseline. Table 3 shows the comparison of Random and Suggest scenarios. It is seen that without preparation steps, the results of Random and Suggest scenarios are not significantly different. On the other hand, in scenarios with preparation steps, the proportion of remaining healthy forest is greater in Suggest scenarios than in Random scenarios.
Table 2Wilcoxon signed-rank test statistic and p value for the comparison of remaining healthy forest proportions of scenarios with BAU and with Enforce (n=50).

Table 3Wilcoxon signed-rank test statistic and p value for the comparison of remaining healthy forest proportions between Random and Suggest scenarios (n=50).

4.1 Insights about the case study
Our simulation results reveal several points that deserve further attention and discussion. One such point is the importance of the first time step in the result of the simulations. In the comparison of the scenarios in Fig. 7, those which have a smaller proportion of infested cells at the end of the first time step have a larger proportion of healthy forest remaining at the end of the final time step. Future infestations as well as the size of the areas to cut thus depend on infestations in the first time step. Therefore, the more newly infested trees cut in the first time step, the more healthy forest remains in future time steps. As an implication of the importance of success at the first step and expanding this discussion beyond the scope of the present study, if the government has access to limited financial resources to provide incentives for users, then our insight suggests that focusing the incentives at the beginning of intervention may contribute substantially to success at the end. The study of such cases and building hybrid models for them, where the government uses both incentives and recognition, can be an area for future research.
Our results in Fig. 7 show that forest cover is eliminated not only by infestations, but also by the management action considered, which is to cut trees in order to stop the progress of infestations. Depending on the scenario, the proportion of the forest that is cut may even be larger than the proportion that is infested. Particularly when infestations spread in a large area and user agents decide to cooperate with the governing agent, user agents will cut a large zone in the forest and a small proportion of healthy forest will remain. Likewise, in the Enforce scenario, control of the epidemic is achieved at the cost of cutting a large area of the forest, but in this case the proportion of remaining healthy forest is larger, and the participation of user agents is enforced and not voluntary.
We noted that preparatory steps lead to the emergence of the desired behavior among user agents, even if the governing agent's decisions are made randomly. This shows that recognizing responsible users and introducing them into the society is a powerful mechanism with the potential to create new behavioral norms. Indeed, during preparation time, the social model runs alone before starting the ecological model, and user agents are introduced to the scheme of recognition of responsible behavior. As user agents compete for recognition, the value of being recognized in this scheme increases. After preparation time, the coupled model runs begin, with the social model keeping its memory of the value of recognition of responsible behavior. That is why, even in our Random scenarios where the governing agent does not learn to improve its decisions, there is some responsible action by user agents.
Another interesting matter about the simulations is that they show that, in all scenarios, infestations spread rapidly at first and slow down later so that by the final time steps little or no change is noticeable in the proportion of the study area that is infested. As the spread of infestations stops, there will be no areas to cut around observed infestations, and the composition of the study area will not change anymore. It is noteworthy that in BAU, the largest spread of infestations happens in the first three time steps. Therefore, in the Suggest scenarios, if no management action is taken in these initial time steps, then a large part of the forest is destroyed by infestations.
4.2 Insights about governance of SESs
In addition to the abovementioned points about the particular case of simulations, in this study we gained insight into the more general problem of the sustainable management of SESs by engaging users. Our most important finding in this study is that it is possible to create strong motivation for effective action towards the protection of natural resources in a SES by encouraging users – without financial incentives, enforcement, or punishment. The latter is of particular importance because the role of punishment as a basis for the formation of norms of environmentally responsible behavior has been emphasized in the literature of SESs (Farrow et al., 2017) and social sciences (Axelrod, 1986). Our results show that even without punishment, recognition of responsible behavior through the mechanism of our model can create a force that acts towards the emergence of a norm of responsible behavior. Moreover, from the model results presented in Fig. 7, we gain the insight that even with the existence of the potential for action towards protection of a natural resource, uncalculated governance decisions about using that potential may have adverse effects on the resource. The simulations show an example of this type. The difference between model results with and without an intelligent algorithm highlights the importance of well-thought-through decision-making in the governance of SESs.
Another general insight that we gained from the simulations pertains to the temporal differences between social and ecological processes, which add to the complexity of a SES. For example, from our simulations we noted that formation of an environmentally responsible behavioral norm takes time. We also noted, throughout the simulations produced, that the largest damage made by the ecological disturbance occurred in the beginning time steps of the study. Therefore, if the efforts to promote a new norm of responsible behavior begin at the onset of the ecological disturbance, then by the time the responsible behavior emerges in the society, much of the resource has already been lost. This means that it is important to prepare the society and promote environmentally responsible behavior before there is a need for action to protect the natural resource.
4.3 Reflections on the use of conceptual bottom-up models in the study of complex systems
Our work is an example of the application of conceptual models for understanding complexity. In this section, we highlight several noteworthy points in this regard.
Questions arise about the relevance and usefulness of conceptual models, as they typically involve simplifying assumptions and may not be constrained by empirical data. Indeed, where the objective is precise prediction, simplistic conceptual models are not helpful. However, in studies where the aim is to gain understanding about a complex system, conceptual bottom-up models can be of use.
Complex systems typically involve multiple and possibly diverse interactions among their components. To follow all these interactions simultaneously is a challenge for the unaided human mind. This can make the dynamics of these systems difficult to understand, even if individual interactions are simple. Bottom-up modeling offers a solution for these challenges by simulating smaller components of the system and simple interactions among them. Such interactions are typically easy to understand. Therefore, the result of the calculation of many such interactions will be reasonable even if the calculation load is beyond the capacity of the unaided human mind. This is how conceptual bottom-up models help us gain insight into complexity.
In our study, for example, at the individual level user agents act upon self-interest, which is easy to understand. At the aggregate level, however, the system is highly complex: decision factors of user agents depend on the history of actions of all user agents and the governing agent on the one hand and changes in the ecological simulation on the other hand. Moreover, the ecological simulation is affected by the decisions of user agents. Computer simulations showed that such a complex setting can result in the emergence of environmentally responsible behavior and that the effectiveness of such behavior depends on the timing of its emergence. We do not claim that our model is a replication of reality, but we argue it makes sense. In other words, if a system has a configuration similar to our model, it is reasonable to assume the system has a tendency to evolve in a fashion similar to our simulations.
Conceptualizing a complex, dynamic, and multifaceted situation involves deciding which of its many degrees of freedom to reduce and which to keep in an abstract, simplified representation. There are many combinations of degrees of freedom and therefore many ways to perform the above task, which is a part of the problem formulation stage. We emphasize the importance of this stage because it shapes all subsequent developments and analyses and eventually defines what can be learned from the model about the subject of study. In the example of our work, identifying the importance of recognition as a motivation for responsible behavior and subsequently defining a hypothetical scheme of governing and user agents and interactions within them and between them and the ecosystem formed the foundation for the development of our model.
Another noteworthy remark is the importance of experimenting with the conceptual model in order to extract useful information from its output. A model serves as a virtual laboratory where one can run multiple experiments with various settings. Comparing results of simulations made with different settings can provide insightful information if the experiments are properly defined. We used several baseline settings or scenarios as reference for comparison with our main simulations. We also compared our baselines with each other to learn about the space of possible results. Our multiple scenario comparisons revealed important information about the complexity of the system. Especially informative was our counterintuitive observation that our RL algorithm does not necessarily outperform a naïve model with random decisions for the governing agent. This surprising finding led us towards defining and experimenting with preparatory steps for the social model before coupling it with the ecological model.
We end this section with a note about simplified models with techniques such as machine learning and reinforcement learning and their relevance to complex problems such as policymaking. Arguably, policymakers often do not have access to extensive data that allow them to evaluate their actions and optimize their future decisions. They make decisions in ways that are different from how they are made in simplified models such as ours. Indeed, our model does not aim to produce exact replications or predictions of the real world. Rather, the objective of our model is to provide insight about a complex problem. Because repeated trial-and-error experiments are not possible in real-world situations, our approach has been to develop a virtual laboratory where we can run experiments without the risk of adverse effects. Such abstraction allowed us to overcome real-world constraints and produce datasets that could be analyzed for optimum policy selection. In this sense, our abstract reinforcement-learning model allowed us to run experiments that were otherwise not possible in the real world.
4.4 Challenges and perspectives for future work
Our model is defined in a specific scope. This scope might also be considered a limitation for the model. That is, our model does not account for the effect of processes other than what we included in it. Future works may use other social models instead of ours and insert them into our SES model. Potential research efforts may also couple other ecological models to the social model. In these cases, the coupling mechanism of our model may be modified according to the needs of other applications and assumptions. As another suggestion for future works, a challenge that can be addressed is the addition of a third submodel into the coupled model to account for economic complexity. In the example of this study, total harvest from the forest comprises market supply, which influences market price and sales quantity, which in turn influence users' profit and hence individual decisions on harvest in the next time step. Another matter that may be considered in future works is interactions among user agents. In the present study, our goal was to gain useful insight for managerial and government decision-making. Therefore, our RL decision-making algorithm was placed in the hands of the governing agent. Future works can equip user agents with more sophisticated decision algorithms.
In this work we approached a complex social–ecological situation and translated it into a problem formulation. Then we built a conceptual model and used it to gain insight into the subject of study through a set of hypothetical experiments. We connected a social model and an ecological model, which were developed independently, through a coupling mechanism to build a conceptual social–ecological model. Using our model, we carried out tests that allowed us to perform “what-if” analyses with several scenarios of SES management. Our simulations showed that in a society where individuals or companies (i.e., “agents”) care about their reputation, it is possible to promote environmentally responsible behavior through an encouragement mechanism without use of force, without use of financial incentives, and only by recognition of responsible individuals in the society. In the management of a SES under disturbance, it is important to note that before the emergence of environmentally responsible behavior, the disturbance may damage the ecological system, as demonstrated in our zero-preparation-scenario simulations. It is therefore important to prepare the society in advance for engagement in environmental protection and ecological conservation action. We used a conceptual model as a virtual laboratory for performing hypothetical experiments, and by comparing the outputs of those experiments, we gained insight about a complex system.
A1 Overview
A1.1 Purpose
The overall goal of this study is to gain insight about the possibility of the emergence of environmentally responsible behavior in a SES in the absence of altruism, obligation, and financial incentives. To that end, this model has been built with the purpose of simulating a mechanism of recognition of environmentally responsible behavior in a setting of forest disturbance. We use the model to learn about the complexities of a SES in which users of a forest resource are requested to participate in a costly action to protect the resource from a disturbance. Particularly, we intend to better understand the potential of the desire for a good reputation in the promotion of environmentally responsible behavior and its implications for management and policymaking. The model has been designed for scientists, policymakers and decision-makers, and experts with an interest in developing decision support systems.
A1.2 Entities, state variables, and scales
The model consists of a social component, which is an ABM, and an ecological component, which is a spatial ecological model. The social ABM includes a governing agent; several user agents; and an auxiliary agent called the registrar, which has been defined for a better understanding of the model. The model includes a spatial component, which represents a forest resource attacked by insect infestations. The spatial ecological model's units are grid cells.
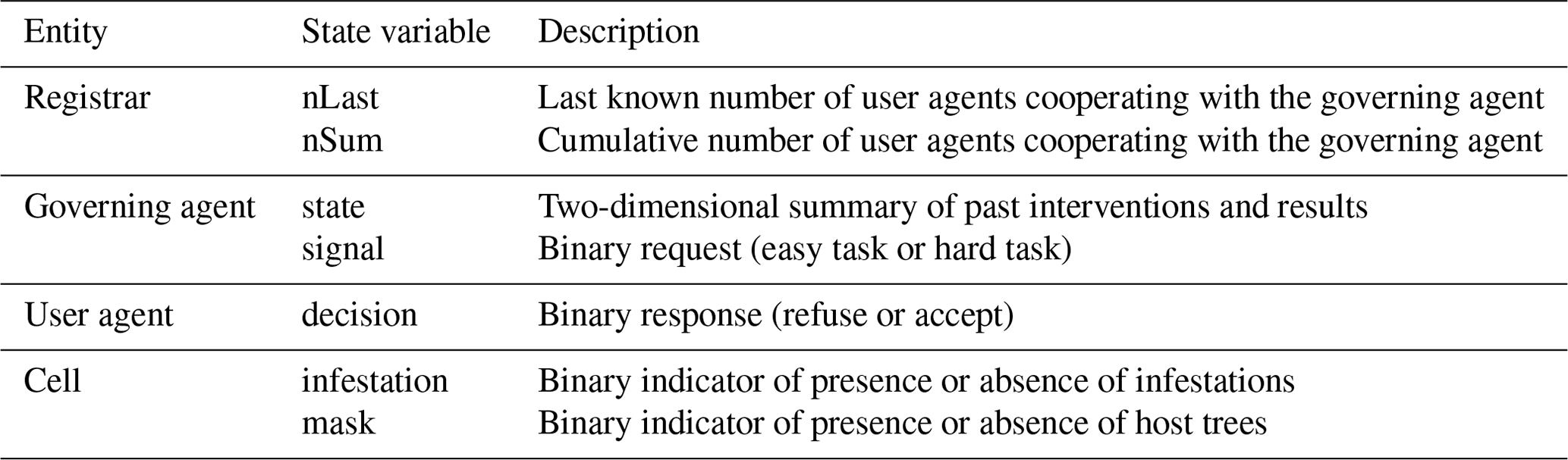
In each time step, the governing agent is in a state, takes an action, and receives a reward. The governing agent's state is a two-dimensional variable which cumulatively summarizes past interventions and their results. The two components of this state variable are calculated based on actions and rewards. The governing agent's reward is the cooperation by the user agents in the management action to save the forest. The governing agent's action is to generate a binary signal for communication to user agents. A signal of 0 is a request for a no-cost action, and a signal of 1 is a request for a costly action. To produce a signal, the governing agent uses a policy, which recommends an action for each state. To update its policy, it uses its memory of past states, actions, and rewards. For that purpose, the governing agent has two arrays of time-discounted scores calculated for each (state–action) pair (Harati et al., 2021a). Each user agent is allocated a forest zone where the user agent harvests. These zones are created by dividing the map of the study area into equal squares. Each square contains cells that are in the study area and cell that are not. Therefore, user zones include various numbers of cells from the study area. Moreover, each user agent is characterized by a constant decision threshold that it uses in a cost–benefit analysis to make a binary decision in response to the governing agent's signal. Decisions of 0 and 1 mean rejection and acceptance of the governing agent's request, respectively. The registrar is characterized by two variables, nSum and nLast, which are non-negative integers. nSum is the total number of times user agents decided to cooperate with the governing agent. nLast is the number of user agents who cooperated with the governing agent the last time the latter requested a costly action. In the spatial component of the model, each cell is identified by geographical data fields including coordinates, elevation, aspect, slope, and ruggedness. Cells are marked with the presence or absence of infestations. Cells are also marked with a mask layer that indicates the presence or absence of trees. The simulation area is divided into zones, and each zone is allocated to a user agent. Table A1 lists the model entities and their state variables.
The social ABM is influenced by an exogenous driver: the spread of insect infestations in the forest. This driver is simulated in the spatial ecological model, which is coupled with the ABM. The spatial ecological model is a GIS model that simulates land change. The land change process of this study is the infestation of forests of BC in western Canada by the mountain pine beetle (MPB). The area where infestations are modeled is a sub-division of the Kamloops Timber Supply Area (TSA). The extent of this area is from 50°45′22′′ N, 120°19′59′′ W to 51°32′40′′ N, 119°6′0′′ W . In the spatial ecological model, one grid cell represents an area of 400 m × 400 m.
A time step in the coupled social–ecological model represents 1 year, and the simulations ran for 10 years. In addition, separate sets of simulations were run with the social model alone, in which the time step was arbitrarily defined as 1 month. These simulations, which prepared the agents for later runs of the coupled social–ecological model, were performed with 10 and 20 additional steps.
A1.3 Process overview and scheduling
In the coupled social–ecological model, in each time step, infestations spread from infested cells in the previous time step. This spread is simulated by the spatial ecological model. Newly infested grid cells remain invisible to the governing agent for one time step after infestation and become visible in the next time step. These grid cells act as sources of the spread of infestations while they are invisible to the governing agent.
The social model's governing agent analyzes the last visible spread of infestations and calculates the cost of management action to stop the spread of infestations in each user zone. The management action is to cut a neighborhood area of the forest surrounding the last visible infestations. Accordingly, the cost of action is defined as proportional to the size of the said neighborhood. Then the governing agent sends a binary signal to the user agents. A signal of 1 means the governing agent requests that the user agents participate in the management action in their allocated forest zone voluntarily and at their own cost in exchange for a “responsible user” label. The “responsible user” label only shows recognition of the user agents who cooperate with the governing agent and has no monetary value. A signal of 0 means the governing agent requests that the user agents do an easy task with no cost for the user agents and no benefit for the governing agent, in exchange for the “responsible user” label. There is no difference between labels given when the governing agent's signal is 0 or 1. The governing agent uses a reinforcement-learning (RL) algorithm in order to produce its signal, considering the past states, actions, and rewards (Harati et al., 2021a). The reward for the governing agent is the cooperation of the user agents in the costly management action and thus saving the forest from the infestations.
Each user agent considers the governing agent's signal and produces a binary decision in response, which indicates whether or not the user agent accepts the governing agent's request in exchange for the “responsible user” label. When the governing agent's signal is 0, the requested action is of no cost, all user agents accept the governing agent's request, and all user agents receive the “responsible user” label. When the governing agent's signal is 1, each user agent makes a decision with a cost–benefit analysis, taking into account the governing agent's calculated cost of action, the history of the “responsible user” label, the uniqueness and visibility that they gain if they get the label, and the revenue from sales. Each user agent considers obtaining the label as an opportunity to be unique in having recognition that some user agents do not. Such uniqueness is assessed based on the response of user agents to the governing agent in the last known interaction. Each user agent also assumes that the acknowledgement of the label in its group depends on how much the group knows the label, which in turn depends on the cumulative number of times the label has been seen in the group. Thereupon, user agents consider a visibility score for the label.
In order to help understand interactions in the model, another agent, the registrar, is defined. The registrar observes and registers actions of the governing agent and the user agents in each time step from the beginning of an episode of simulations. The other agents refer to the registrar in their decision-making process.
Once the users make their decisions, a message is sent from the social ABM to the spatial ecological model, and modifications are correspondingly made in the forest map. These modifications include removing trees for annual harvest or management action. Specifically, each user's zone is subject to annual harvest unless that user cooperates with the governing agent when the signal is 1. In this case, that is, if the signal is 1 and the user agents cooperate with the governing agent, the neighborhood indicated for management action in the user's zone is cut. The modified landscape map is used by the spatial ecological model in the next time step.
A2 Design concepts
A2.1 Theoretical and empirical background
The core idea of the social ABM is the promotion of responsible behavior using individuals' desire for respect. The theoretical basis for this idea notes that sustainability issues are problems of collective action (Ostrom, 1990); that an individual's behavior is influenced by the observation of behavior of others in the society, or descriptive norms, as stated in the theory of normative conduct (Cialdini et al., 1990); and that people care about their reputation in the society (Anderson et al., 2015; Lazaric et al., 2020; Nolan et al., 2008; Tascioglu et al., 2017).
The two models that are coupled in this study are both taken from previous works. The social ABM has been built on the above concepts and calibrated through thousands of training iterations (Harati et al., 2021a). The spatial ecological model has been developed, calibrated, and tested with observed data (Harati et al., 2020). We refer the readers to these two papers for a detailed description of the models.
Complexities arise when the model's governing agent uses the “responsible user” label to encourage the user agents to engage in a costly action. At the beginning of the simulations, the label has not been introduced into the society of user agents, and it is therefore not deemed valuable. Later on, as the label becomes more visible in society, its value increases in the calculations of the user agents. Meanwhile, an ecological disturbance causes damage to the forest resource. The model sheds light on the complexities of the abovementioned setting. Specifically, the model helps answer these questions about the possibility of success for the governing agent: can the governing agent gain the cooperation of the user agents? Can they effectively control the disturbance? Can they save the resource?
The governing agent's decisions are based on bounded rationality (Simon, 1990). The governing agent does not know how the group of user agents will behave, it does not know what their decision thresholds are, and its information about the ecological system comes with a delay. The governing agent is designed in such a way that it observes the outcome of its actions and learns to update its decision policy according to its observation. User agents make rational choices (Scott, 2000) based on information that is available to them. They do not modify their decision rule. User agents compare the utility of a suggestion with a threshold that indicates their hesitation, and they make their decisions accordingly.
The social ABM uses input from the spatial ecological model. This input is the simulation of changes in a landscape, which are produced and processed through a GIS approach. This GIS approach does not take a time series of external inputs during the simulations. However, the spatial ecological model is calibrated before the start of simulations using GIS data, which are available at the grid cell level.
A2.2 Individual decision-making
Subjects of decision-making are the governing agent and user agents. The object of decision-making of the governing agent is its binary signal, which is a variable that the governing agent communicates to user agents. The signal indicates whether the governing agent is requesting a costly action or no-cost action from the user agents. The object of decision-making of each user agent is its decision, which is the user's response to the governing agent's signal request.
Since the governing agent's decisions are based on bounded rationality and it does not have perfect knowledge of the complex system that it deals with, it takes actions according to its available knowledge. Then based on the result of its action, the governing agent updates its decision policy using a RL algorithm. The governing agent's RL algorithm is a double-learning algorithm, which means it includes two arrays of scores of state–action pairs. These two arrays are updated iteratively in a convoluted manner, each based on the other.
The user agents' decisions are based on rational choice. User agents calculate the utility of cooperating with the governing agent and compare this with an internal decision threshold. The utility that user agents calculate is a quantity between 0 and 1. If the calculated utility of a suggestion exceeds a user agent's decision threshold, then the user agent accepts that suggestion. In the calculation of the utility of the “responsible user” label, user agents take into account the uniqueness that they will have with the label and the visibility of being associated with responsibility. They assess uniqueness based on the last known proportion of user agents who cooperated with the governing agent in a costly action. They assess visibility based on the total number of times the label has been presented in their society since the first time step of the simulation. User agents calculate uniqueness and visibility based on the registrar's nLast and nSum.
User agents adapt to changes in their social and ecological environment. Social changes influence each user agent's perceived value of being recognized as a “responsible user”, and ecological changes influence the size of the area where the management action is prescribed, hence influencing the cost of action required to receive the “responsible user” label. These variables do not change the decision rule of the user agent. The simulations shed light on the emergence of a norm of environmentally responsible behavior among user agents. On the other hand, the spread of infestations in the forest is a spatial process, which influences the governing agent's perceived state of forest health and, subsequently, cost of management action in each user zone.
All agents in the model use memory in their decisions. User agents refer to the registrar's memory. The governing agent, in addition to the memory of the registrar, uses its own built-in memory. The governing agent's RL algorithm applies a future discounting rate in the calculation of the present value of the future consequences of its decisions.
The model includes some elements of uncertainty. The decision thresholds of user agents are taken from a normal distribution. The decision policy of the governing agent is defined stochastically. That is, for each state–action pair, the policy includes a number, which is used as a threshold for comparison against a random number. The decision is made according to that comparison.
A2.3 Learning
Learning is the basis of the governing agent's RL algorithm. The RL algorithm keeps track of its states, actions, and rewards. The algorithm uses a policy to decide an action in each state. Then, based on the subsequent reward, the RL algorithm updates its policy. Through iterations, the governing agent's RL algorithm learns to adjust its policy in order to maximize its rewards. The model does not include collective learning.
A2.4 Individual sensing
In this model, individuals are the agents in the social ABM. The model includes endogenous and exogenous variables. For endogenous variables, user agents sense the governing agent's signal. User agents and the governing agent sense the total number of “responsible user” labels as well as the last known number of labels given in a time step when the signal was 1. These variables are accessible to agents through the registrar. These endogenous variables are sensed without error. As for exogenous variables, the governing agent senses the changes that happen in the ecosystem. In our conceptual model, these changes are simulated by a spatial ecological model that is coupled to the social ABM. Therefore, this information is exogenous to the ABM. The sensing of environmental change is erroneous because in the definition of the model, environmental changes are not visible when they occur. The time lag between the occurrence and visibility of the changes causes errors in the governing agent's sensing, thus adding to the complexity of the SES model. The governing agent and user agents sense the variables stored in the registrar, which is an auxiliary agent created for better understanding the model. The registrar, in turn, senses the governing agent's signal and each user agent's decision. These variables are sensed without error. The governing agent senses the spatial environment at global and local scales, when it calculates the overall state of health of the forest and the cost of management action in each user agent zone, respectively.
Within the social ABM, when the governing agent, users agents, or the registrar requires information from another agent, they call that other agent. The agents are equipped with functions that send the requested information. Agents do not have direct access to variables of other agents. In the link between the social ABM and the spatial ecological model, each model is designed to perform some calculations and then wait for the other model to send the required information. This information is transferred by copying a file into the recipient model's Inbox directory. The model does not assume any costs associated with cognition or for gathering information.
A2.5 Individual prediction
The governing agent's RL algorithm uses the data gained through experience in order to assess the values of its possible actions in the next step. The user agents consider data of the last known states in their calculations. The governing agent uses a temporal-difference RL algorithm known as double expected Sarsa (Sutton and Barto, 2018). The user agents assess the future value of obtaining the “responsible user” label with the assumption that the agents who previously chose a costly action in return for a label will do so again. The predictions of the agents may be erroneous. User agents have limited ability to predict future changes in their society. Likewise, the governing agent's social prediction capability is limited. In addition, the governing agent's external input, which comes from the ecological spatial model, is designed to come with a delay.
A2.6 Interaction
The model includes direct and indirect interactions among agents. Direct interactions include the communication of governing agent's signal and action cost calculations, as well as user agents' decisions. Indirect interactions occur due to user agents' desire to be better recognized than their peers, as well as through the market where all user agents sell their harvest. The governing agent's decisions and calculations depend on the history of responses from the user agents as well as the state of the ecological system. User agents' decisions depend on action costs, which are calculated through a spatial analysis. Interactions within the social ABM are communicated via the registrar. Interactions between the social ABM and the ecological spatial model are performed via file transfers, in which messages are copied into the recipient's Inbox directory. The model does not include a coordination network.
A2.7 Collectives
There are no collectives in this model.
A2.8 Heterogeneity
User agents are heterogeneous in their decision thresholds, as well as their allocated forest zones. User agents and the governing agent are different in their decision-making. The object of decision of the governing agent is the signal it sends to the user agents, and the objects of decisions of user agents are their responses to the governing agent. The governing agent uses a RL algorithm in its decision, whereas user agents compare the utility of a suggestion with a threshold.
A2.9 Stochasticity
The decision thresholds of the users are drawn from a normal distribution. The decision policy of the governing agent is stochastic.
A2.10 Observation
In each time step, the governing agent's signal; the proportion of user agents who cooperated with the governing agent; and the remaining proportions of infested, non-infested, and harvested forest land are collected for analysis. In addition, for testing and verification of the model, all communications between the social ABM and the ecological spatial model are saved. Among the user agents, cooperation with the governing agent, despite its cost, is a behavior that emerges through simulations. In addition, saving forest areas from infestations is an emergent effect in the simulations.
A3 Details
A3.1 Implementation details
The social ABM was developed in Java, using features of Repast (North et al., 2013). The spatial ecological model was developed in R (R Core Team, 2019). Please see the “Code and data availability” section for links to model code and results.
A3.2 Initialization
The social ABM consists of a governing agent, nine user agents, and a registrar agent. The governing agent's policy is defined by the results of a previous study (Harati et al., 2021a), wherein the governing agent's RL algorithm was trained through interaction with the same number of user agents. There is no history of the decisions of user agents; therefore the last known number of user agents cooperating with the governing agent is zero. In the previous study that defined the social ABM (Harati et al., 2021a), three sets of simulations were run with mean user agent decision thresholds of 0.3 (low), 0.5 (medium), and 0.7 (high). In the present study, assuming that the governing agent does not have any information about the decision thresholds of user agents, we initialized the governing agent with the policy obtained from training with medium-level user agent decision thresholds. The said training was the output of the previous study (Harati et al., 2021a). In the spatial ecological model, locations of insects at the start of simulations are extracted through GIS analysis of infestation data (BC Ministry of Forests, 2015).
There are some differences between various runs of the same series of simulations. The decision thresholds of user agents in the social ABM are drawn from a truncated normal distribution with a pre-set mean and standard deviation. In new runs, new thresholds are drawn from the same normal distribution. Therefore, user agents change in new runs. For the governing agent, within the same set of simulations, the decision policy is updated based on rewards earned in the previous episode of runs.
A3.3 Input data
In each time step, the social ABM uses input from the ecological spatial model. This input is based on simulations of the spread of infestations in the forest. As the simulated infestations spread further in the forest, the data transmitted to the social ABM change over time.
A3.4 Submodels
The social ABM includes a RL algorithm for the governing agent and a simple threshold decision-making algorithm for user agents. These have been explained in detail in a previous work (Harati et al., 2021a). The ecological spatial model is based on a logistic regression algorithm, which has been explained in detail in another previous work (Harati et al., 2020). The social and ecological models are coupled through a mechanism that we call flip-flop. The social model requires inputs about the state of the forest and newly spread infestations, which is calculated in the ecological model. Conversely, the ecological model requires inputs on actions of user agents, which change land cover. In the flip-flop mechanism, each of the models runs its algorithm up to the moment it requires input from another model. Then it enters a loop in which it waits and observes an Inbox directory that is allocated to that model on the computer's hard disk. In the meantime, the other model continues its calculations and eventually produces an output message file and sends it to the abovementioned Inbox directory. As soon as the message file is copied into the Inbox directory, the first model notices the change in the contents of its Inbox, exits the waiting loop, reads the file, and resumes computing. In this way, models take alternative turns of running and pausing, hence the name flip-flop. This strategy has enabled us to facilitate the exchange of information between two different algorithms (i.e., the social and the ecological models) that have been implemented in two different computer languages (Java and R, respectively).
The management action that we consider in this study is cutting cells in a neighborhood of newly observed infestations. The size of this neighborhood is a parameter that needs to be defined. Based on insight obtained about the spatial spread of MPB infestations in a previous study (Harati et al., 2021b), in the present study we used Moore neighborhoods of size 4 to simulate the abovementioned management action. Considering that the cell size in the model is 400 m, the said neighborhood will be a square with side length of 3.6 km. The rationale for this hypothetical neighborhood is that newly infested cells are not immediately detected. By the time infested cells change color and become observable, the infestation has spread further in the area.
The subject of calibration of the social ABM is the decision policy of its RL algorithm. This policy was learned previously (Harati et al., 2021a) through 50 sets of 4000 training episodes, each in a configuration with medium-level decision thresholds for user agents. Each set of 4000 episodes resulted in 1 learned policy; thus, there were a total of 50 learned policies. The mean of those 50 policies was used as the starting policy in the simulations of the present study. The spatial ecological model was calibrated using observed infestation data of the years 2002–2004 for BC. Details of the model and its calibration are described in the corresponding previous work (Harati et al., 2020).
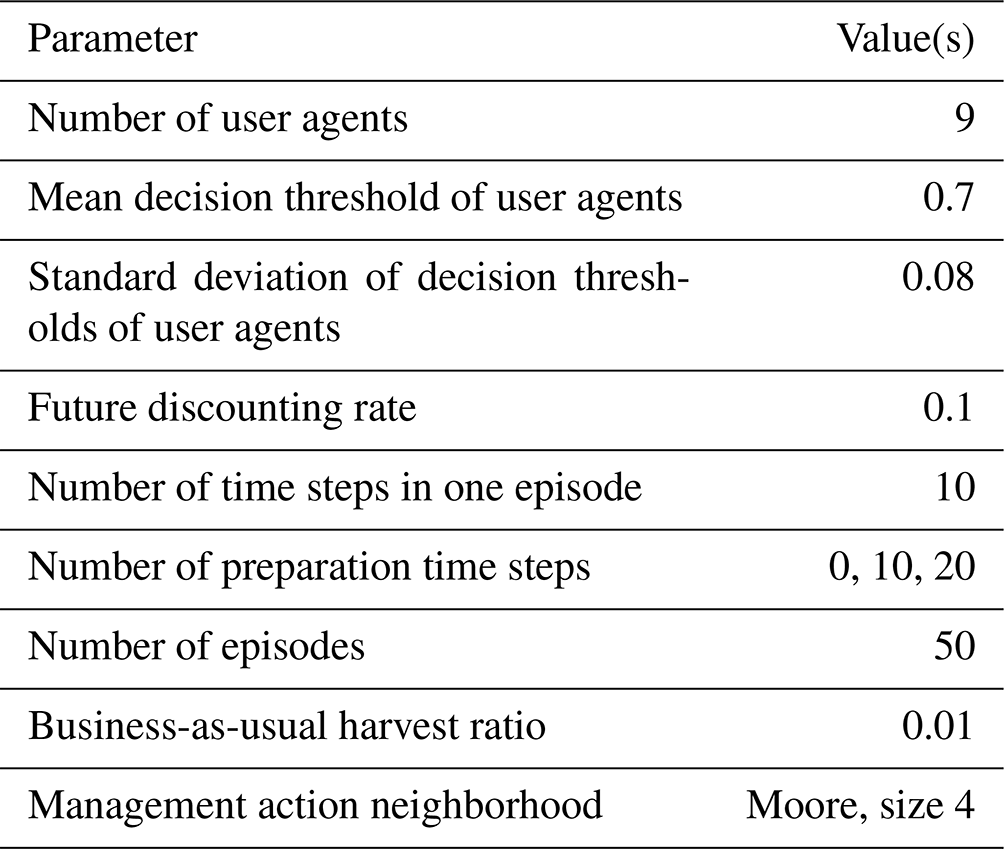
As both the social ABM and the spatial ecological model are taken from previous works, we only made modifications to code and parameters for the coupling of the two models and the runs of this study. The social model's parameters include the number of user agents, mean and standard deviation of decision thresholds of user agents, future discounting rate, number of time steps in one episode, and number of episodes. Each episode of simulations was run with a new set of user agents. In addition, in the present study we added a new parameter for the number of preparation steps before the social model is coupled with the spatial ecological model. The parameters of the coupling of the two models are the business-as-usual harvest ratio, which is the ratio of the study area that the user agents would harvest regardless of disturbance management, and the size of the neighborhood of newly visible infestations, in which the management action of cutting cells is defined. Table A2 shows the model parameters and their values. Note that in this table all values are dimensionless except for the management action neighborhood size, which is in grid cells.
Model code files are available at a Zenodo repository (https://doi.org/10.5281/zenodo.11245520, s-harati, 2024) under an MIT license. Datasets of model input and output are available in an OSF repository (https://doi.org/10.17605/OSF.IO/URJQ8, Harati-Asl et al., 2024). Further information about the model is presented below:
-
model name – flipflopSEM (FlipFlop: a Social Ecological Model);
-
developers – Saeed Harati-Asl, Liliana Perez, and Roberto Molowny-Horas;
-
languages – Java and R.
SHA developed model concept and code under supervision by LP and RMH. SHA curated model data and ran the model. All authors contributed to the writing and the preparation of the manuscript.
The contact author has declared that none of the authors has any competing interests.
Publisher’s note: Copernicus Publications remains neutral with regard to jurisdictional claims made in the text, published maps, institutional affiliations, or any other geographical representation in this paper. While Copernicus Publications makes every effort to include appropriate place names, the final responsibility lies with the authors.
We are thankful to the Université de Montréal's International Affairs Office (IAO) for their International Partnership Development program, which allowed the collaboration between researchers from Université de Montréal and CREAF.
This research was partially funded by the Natural Sciences and Engineering Research Council (NSERC) of Canada through a Discovery Grant, number RGPIN/05396-2016, awarded to Liliana Perez. Roberto Molowny-Horas received financial support from the European Union's Seventh Framework Programme through NEWFORESTS, program number PIRSES-GA-2013-612645.
This paper was edited by Sam Rabin and reviewed by two anonymous referees.
Anderson, C., Hildreth, J. A. D., and Howland, L.: Is the desire for status a fundamental human motive? A review of the empirical literature, Psychol. Bull., 141, 574–601, https://doi.org/10.1037/a0038781, 2015.
Axelrod, R.: An evolutionary approach to norms, Am. Polit. Sci. Rev., 80, 1095–1111, 1986.
Barbier, E. B.: The Concept of Sustainable Economic Development, Environ. Conserv., 14, 101–110, https://doi.org/10.1017/S0376892900011449, 1987.
Batty, M. and Torrens, P. M.: Modelling and prediction in a complex world, Futures, 37, 745–766, https://doi.org/10.1016/j.futures.2004.11.003, 2005.
Batty, M., Xie, Y., and Sun, Z.: Modeling urban dynamics through GIS-based cellular automata, Comput. Environ. Urban Syst., 23, 205–233, https://doi.org/10.1016/S0198-9715(99)00015-0, 1999.
BC Ministry of Forests: British Columbia's Forests And Their Management, 24 pp., https://www.for.gov.bc.ca/hfd/pubs/docs/mr/mr113/BC_Forest_Management.pdf (last access: 25 March 2024), 2003.
BC Ministry of Forests: BC MPB Observed Cumulative Kill – vol. 12 [data set], https://www.for.gov.bc.ca/ftp/HRE/external/!publish/web/BCMPB/Year12/ (last access: 19 September 2019), 2015.
Berkes, F. and Folke, C.: Linking social and ecological systems for resilience and sustainability, in: Linking Social and Ecological Systems: Management Practices and Social Mechanisms for Building Resilience, edited by: Berkes, F., Folke, C., and Colding, J., Cambridge University Press, 1–26, ISBN-10: 0521785626, ISBN-13: 978-0521785624, 2000.
Blundell, A. G. and Gullison, R. E.: Poor regulatory capacity limits the ability of science to influence the management of mahogany, Forest Policy Econ., 5, 395–405, https://doi.org/10.1016/S1389-9341(03)00038-8, 2003.
Bone, C., Dragicevic, S., and Roberts, A.: A fuzzy-constrained cellular automata model of forest insect infestations, Ecol. Modell., 192, 107–125, https://doi.org/10.1016/j.ecolmodel.2005.09.013, 2006.
Bonnell, T. R., Campennì, M., Chapman, C. A., Gogarten, J. F., Reyna-Hurtado, R. A., Teichroeb, J. A., Wasserman, M. D., and Sengupta, R.: Emergent Group Level Navigation: An Agent-Based Evaluation of Movement Patterns in a Folivorous Primate, PLoS One, 8, e78264, https://doi.org/10.1371/journal.pone.0078264, 2013.
Bourceret, A., Amblard, L., and Mathias, J. D.: Governance in social-ecological agent-based models: A review, Ecol. Soc., 26, https://doi.org/10.5751/ES-12440-260238, 2021.
Braun, D. and Guston, D. H.: Principal-agent theory and research policy: An introduction, Sci. Public Policy, 30, 302–308, https://doi.org/10.3152/147154303781780290, 2003.
Brown, B. J., Hanson, M. E., Liverman, D. M., and Merideth, R. W.: Global sustainability: Toward definition, Environ. Manage., 11, 713–719, https://doi.org/10.1007/BF01867238, 1987.
Brundtland, G. H.: Report of the World Commission on environment and development: “our common future”, World Commission on Environment and Development (WCED). Our Common Future. Oxford and New York: Oxford University Press, 383 pp., ISBN 0 19 282080 X, 1987.
Castle, C. and Crooks, A.: Principles and concepts of agent-based modelling for developing geospatial simulations, Centre for Advanced Spatial Analysis (UCL), London, UK, ISSN 1467-1298, 2006.
Cialdini, R. B., Reno, R. R., and Kallgren, C. A.: A Focus Theory of Normative Conduct: Recycling the Concept of Norms to Reduce Littering in Public Places, J. Pers. Soc. Psychol., 58, 1015–1026, https://doi.org/10.1037/0022-3514.58.6.1015, 1990.
Clarke, K. C., Hoppen, S., and Gaydos, L.: A self-modifying cellular automaton model of historical urbanization in the San Francisco Bay area, Environ. Plan. B Plan. Des., 24, 247–261, https://doi.org/10.1068/b240247, 1997.
Cosens, B., Ruhl, J. B., Soininen, N., Gunderson, L., Belinskij, A., Blenckner, T., Camacho, A. E., Chaffin, B. C., Craig, R. K., Doremus, H., Glicksman, R., Heiskanen, A.-S., Larson, R., and Similä, J.: Governing complexity: Integrating science, governance, and law to manage accelerating change in the globalized commons, P. Natl. Acad. Sci. USA, 118, e2102798118, https://doi.org/10.1073/pnas.2102798118, 2021.
Crawford, S. E. and Ostrom, E.: A grammar of institutions, Am. Polit. Sci. Rev., 89, 582–600, 1995.
Daily, G. C.: Management objectives for the protection of ecosystem services, Environ. Sci. Policy, 3, 333–339, https://doi.org/10.1016/S1462-9011(00)00102-7, 2000.
de Almeida, C. M., Batty, M., Monteiro, A. M. V., Câmara, G., Soares-Filho, B. S., Cerqueira, G. C., and Pennachin, C. L.: Stochastic cellular automata modeling of urban land use dynamics: Empirical development and estimation, Comput. Environ. Urban Syst., 27, 481–509, https://doi.org/10.1016/S0198-9715(02)00042-X, 2003.
De Young, R.: New ways to promote proenvironmental behavior: Expanding and evaluating motives for environmentally responsible behavior, J. Soc. Issues, 56, 509–526, https://doi.org/10.1111/0022-4537.00181, 2000.
Farrow, K., Grolleau, G., and Ibanez, L.: Social Norms and Pro-environmental Behavior: A Review of the Evidence, Ecol. Econ., 140, 1–13, https://doi.org/10.1016/j.ecolecon.2017.04.017, 2017.
Feeny, D., Berkes, F., McCay, B. J., and Acheson, J. M.: The Tragedy of the Commons: Twenty-two years later, Hum. Ecol., 18, 1–19, https://doi.org/10.1007/BF00889070, 1990.
Filotas, E., Parrott, L., Burton, P. J., Chazdon, R. L., Coates, K. D., Coll, L., Haeussler, S., Martin, K., Nocentini, S., Puettmann, K. J., Putz, F. E., Simard, S. W., and Messier, C.: Viewing forests through the lens of complex systems science, Ecosphere, 5, 1–23, https://doi.org/10.1890/ES13-00182.1, 2014.
Forest Practices Board: Tree Species Harvested In Areas Affected By Mountain Pine Beetles, https://www.bcfpb.ca/wp-content/uploads/2016/04/SR33-Tree-Species-Harvested-in-Areas-Affected-by-MPB.pdf (last access: 25 March 2024), 2007.
Forest Practices Board: Biodiversity Conservation during Salvage Logging in the Central Interior of BC, https://www.bcfpb.ca/wp-content/uploads/2016/04/SR35-Salvage-Logging.pdf (last access: 25 March 2024), 2009.
Gaudreau, J., Perez, L., and Drapeau, P.: BorealFireSim: A GIS-based cellular automata model of wildfires for the boreal forest of Quebec in a climate change paradigm, Ecol. Inform., 32, 12–27, https://doi.org/10.1016/j.ecoinf.2015.12.006, 2016.
Grimm, V., Revilla, E., Berger, U., Jeltsch, F., Mooij, W. M., Railsback, S. F., Thulke, H. H., Weiner, J., Wiegand, T., and DeAngelis, D. L.: Pattern-oriented modeling of agent-based complex systems: Lessons from ecology, Science, 310, 987–991, https://doi.org/10.1126/science.1116681, 2005.
Grimm, V., Berger, U., Bastiansen, F., Eliassen, S., Ginot, V., Giske, J., Goss-Custard, J., Grand, T., Heinz, S. K., Huse, G., Huth, A., Jepsen, J. U., Jørgensen, C., Mooij, W. M., Müller, B., Pe'er, G., Piou, C., Railsback, S. F., Robbins, A. M., Robbins, M. M., Rossmanith, E., Rüger, N., Strand, E., Souissi, S., Stillman, R. A., Vabø, R., Visser, U., and DeAngelis, D. L.: A standard protocol for describing individual-based and agent-based models, Ecol. Modell., 198, 115–126, https://doi.org/10.1016/j.ecolmodel.2006.04.023, 2006.
Grimm, V., Berger, U., DeAngelis, D. L., Polhill, J. G., Giske, J., and Railsback, S. F.: The ODD protocol: A review and first update, Ecol. Modell., 221, 2760–2768, https://doi.org/10.1016/j.ecolmodel.2010.08.019, 2010.
Grimm, V., Railsback, S. F., Vincenot, C. E., Berger, U., Gallagher, C., DeAngelis, D. L., Edmonds, B., Ge, J., Giske, J., Groeneveld, J., Johnston, A. S. A., Milles, A., Nabe-Nielsen, J., Polhill, J. G., Radchuk, V., Rohwäder, M.-S., Stillman, R. A., Thiele, J. C., and Ayllón, D.: The ODD Protocol for Describing Agent-Based and Other Simulation Models: A Second Update to Improve Clarity, Replication, and Structural Realism, J. Artif. Soc. Soc. Simul., 23, 7, https://doi.org/10.18564/jasss.4259, 2020.
Harati, S., Perez, L., and Molowny-Horas, R.: Integrating neighborhood effect and supervised machine learning techniques to model and simulate forest insect outbreaks in british columbia, canada, Forests, 11, 1215, https://doi.org/10.3390/f11111215, 2020.
Harati, S., Perez, L., and Molowny-Horas, R.: Promoting the emergence of behavior norms in a principal–agent problem – an agent-based modeling approach using reinforcement learning, Appl. Sci., 11, 8368, https://doi.org/10.3390/app11188368, 2021a.
Harati, S., Perez, L., Molowny-Horas, R., and Pontius, R. G.: Validating models of one-way land change: an example case of forest insect disturbance, Landsc. Ecol., 36, 2919–2935, https://doi.org/10.1007/s10980-021-01272-0, 2021b.
Harati-Asl, S., Perez, L., and Molowny-Horas, R.: Datasets for Model flipflopSEM, OSF [data set], https://doi.org/10.17605/OSF.IO/URJQ8, 2024.
Janssen, M. A. and Ostrom, E.: Empirically Based, Agent-based models, Ecol. Soc., 11, 37, https://www.jstor.org/stable/26265994 (last access: 25 March 2024), 2006a.
Janssen, M. A. and Ostrom, E.: Governing Social-Ecological Systems, in: Handbook of Computational Economics (vol. 2), edited by: Tesfatsion, L. and Judd, K. L., Elsevier, 1465–1509, https://doi.org/10.1016/S1574-0021(05)02030-7, 2006b.
Kaplan, S.: New ways to promote proenvironmental behavior: Human nature and environmentally responsible behavior, J. Soc. Issues, 56, 491–508, https://doi.org/10.1111/0022-4537.00180, 2000.
Katan, J. and Perez, L.: ABWiSE v1.0: toward an agent-based approach to simulating wildfire spread, Nat. Hazards Earth Syst. Sci., 21, 3141–3160, https://doi.org/10.5194/nhess-21-3141-2021, 2021.
Katzev, R. D. and Johnson, T. R.: Promoting Energy Conservation: An Analysis of Behavioral Research, Westview Press, ISBN 0813373379, 1987.
Kriebel, D., Tickner, J., Epstein, P., Lemons, J., Levins, R., Loechler, E. L., Quinn, M., Rudel, R., Schettler, T., and Stoto, M.: The precautionary principle in environmental science, Environ. Health Perspect., 109, 871–876, https://doi.org/10.1289/ehp.01109871, 2001.
Lambin, E. F. and Geist, H. (Eds.): Land-Use and Land-Cover Change, Springer Berlin Heidelberg, Berlin, Heidelberg, https://doi.org/10.1007/3-540-32202-7, 2006.
Lambin, E. F., Geist, H., and Rindfuss, R. R.: Introduction: Local Processes with Global Impacts, in: Land-Use and Land-Cover Change, edited by: Lambin, E. F. and Geist, H., Springer Berlin Heidelberg, Berlin, Heidelberg, 1–8, https://doi.org/10.1007/3-540-32202-7_1, 2006.
Lazaric, N., Le Guel, F., Belin, J., Oltra, V., Lavaud, S., and Douai, A.: Determinants of sustainable consumption in France: the importance of social influence and environmental values, J. Evol. Econ., 30, 1337–1366, https://doi.org/10.1007/s00191-019-00654-7, 2020.
Liu, J., Dietz, T., Carpenter, S. R., Alberti, M., Folke, C., Moran, E., Pell, A. N., Deadman, P., Kratz, T., Lubchenco, J., Ostrom, E., Ouyang, Z., Provencher, W., Redman, C. L., Schneider, S. H., and Taylor, W. W.: Complexity of Coupled Human and Natural Systems, Science, 317, 1513–1516, https://doi.org/10.1126/science.1144004, 2007.
Maclauchlan, L. E. and Brooks, J. E. (Eds.): Strategies and tactics for managing the mountain pine beetle Dendroctonus ponderosae, B.C. Forest Service, Kamloops Region Forest Health, Kamloops, BC, 60 pp., 1994.
Millennium Ecosystem Assessment: Ecosystems and their services, in: Ecosystems and Human Well-being: A Framework for Assessment, Island Press, Washington, DC, 49–70, ISBN 1-55963-403-0, 2003.
Mosler, H.-J.: Self-dissemination of environmentally-responsible behavior: The influence of trust in a commons dilemma game, J. Environ. Psychol., 13, 111–123, https://doi.org/10.1016/S0272-4944(05)80144-6, 1993.
Müller, B., Bohn, F., Dreßler, G., Groeneveld, J., Klassert, C., Martin, R., Schlüter, M., Schulze, J., Weise, H., and Schwarz, N.: Describing human decisions in agent-based models – ODD + D, an extension of the ODD protocol, Environ. Model. Softw., 48, 37–48, https://doi.org/10.1016/j.envsoft.2013.06.003, 2013.
National Research Council: Advancing Land Change Modeling: Opportunities and Research Requirements, National Academies Press, Washington, D.C., https://doi.org/10.17226/18385, 2014.
Nolan, J. M., Schultz, P. W., Cialdini, R. B., Goldstein, N. J., and Griskevicius, V.: Normative Social Influence is Underdetected, Personal. Soc. Psychol. Bull., 34, 913–923, https://doi.org/10.1177/0146167208316691, 2008.
North, D. C.: Institutions, Institutional Change and Economic Performance, Cambridge University Press, Cambridge, UK, https://doi.org/10.1017/CBO9780511808678, 1990.
North, M. J., Collier, N. T., Ozik, J., Tatara, E. R., Macal, C. M., Bragen, M., and Sydelko, P.: Complex adaptive systems modeling with Repast Simphony, Complex Adapt. Syst. Model., 1, 3, https://doi.org/10.1186/2194-3206-1-3, 2013.
Nyborg, K., Anderies, J. M., Dannenberg, A., Lindahl, T., Schill, C., Schlüter, M., Adger, W. N., Arrow, K. J., Barrett, S., Carpenter, S., Chapin, F. S., Crépin, A.-S., Daily, G., Ehrlich, P., Folke, C., Jager, W., Kautsky, N., Levin, S. A., Madsen, O. J., Polasky, S., Scheffer, M., Walker, B., Weber, E. U., Wilen, J., Xepapadeas, A., and de Zeeuw, A.: Social norms as solutions, Science, 354, 42–43, https://doi.org/10.1126/science.aaf8317, 2016.
Omoto, A. M. and Snyder, M.: Sustained helping without obligation: Motivation, longevity of service, and perceived attitude change among AIDS volunteers, J. Pers. Soc. Psychol., 68, 671–686, https://doi.org/10.1037/0022-3514.68.4.671, 1995.
Ostrom, E.: Governing the commons: The evolution of institutions for collective action, Cambridge University Press, Cambridge, UK, ISBN-10: 0521405998, ISBN-13: 978-1933771779, 1990.
Ostrom, E.: A General Framework for Analyzing Sustainability of Social-Ecological Systems, Science, 325, 419–422, https://doi.org/10.1126/science.1172133, 2009.
O'Sullivan, D.: Complexity Science and Human Geography, Trans. Inst. Br. Geogr., 29, 282–295, https://doi.org/10.1111/j.0020-2754.2004.00321.x, 2004.
Parrott, L., Chion, C., Martins, C. C. A., Lamontagne, P., Turgeon, S., Landry, J. A., Zhens, B., Marceau, D. J., Michaud, R., Cantin, G., Ménard, N., and Dionne, S.: A decision support system to assist the sustainable management of navigation activities in the St. Lawrence River Estuary, Canada, Environ. Model. Softw., 26, 1403–1418, https://doi.org/10.1016/j.envsoft.2011.08.009, 2011.
Perez, L. and Dragicevic, S.: An agent-based approach for modeling dynamics of contagious disease spread, Int. J. Health Geogr., 8, 50, https://doi.org/10.1186/1476-072X-8-50, 2009.
Perez, L. and Dragicevic, S.: Modeling mountain pine beetle infestation with an agent-based approach at two spatial scales, Environ. Model. Softw., 25, 223–236, https://doi.org/10.1016/j.envsoft.2009.08.004, 2010.
Pooyandeh, M. and Marceau, D. J.: A spatial web/agent-based model to support stakeholders' negotiation regarding land development, J. Environ. Manage., 129, 309–323, https://doi.org/10.1016/j.jenvman.2013.07.028, 2013.
Railsback, S. F. and Grimm, V.: Agent-based and Individual-based Modeling: A Practical Introduction, Princeton University Press, ISBN-10: 0691190836, 2012.
R Core Team: R: A Language and Environment for Statistical Computing, https://www.r-project.org/ (last access: 17 September 2024), 2019.
Ross, H. L.: Perspectives on social order, McGraw-Hill, New York, ISBN-10: 0070538727 ISBN-13: 978-0070538726, 1973.
Savarimuthu, B. T. R. and Cranefield, S.: Norm creation, spreading and emergence: A survey of simulation models of norms in multi-agent systems, Multiagent Grid Syst., 7, 21–54, https://doi.org/10.3233/MGS-2011-0167, 2011.
Schlüter, M., Hinkel, J., Bots, P. W. G., and Arlinghaus, R.: Application of the SES framework for model-based analysis of the dynamics of social-ecological systems, Ecol. Soc., 19, 36, https://doi.org/10.5751/ES-05782-190136, 2014.
Scott, J.: Rational Choice Theory, in: Understanding Contemporary Society: Theories of the Present, edited by: Browning, G., Halcli, A., and Webster, F., SAGE Publications Ltd, 126–138, https://doi.org/10.4135/9781446218310.n9, 2000.
s-harati: s-harati/model-flipflopSEM: v1.0.0 (v1.0.0), Zenodo [code], https://doi.org/10.5281/zenodo.11245520, 2024.
Simon, H. A.: Bounded Rationality, in: Utility and Probability, edited by: Eatwell, J., Milgate, M., and Newman, P., Palgrave Macmillan UK, London, 15–18, https://doi.org/10.1007/978-1-349-20568-4_5, 1990.
Stern, P. C., Dietz, T., and Kalof, L.: Value Orientations, Gender, and Environmental Concern, Environ. Behav., 25, 322–348, https://doi.org/10.1177/0013916593255002, 1993.
Sutton, R. S. and Barto, A. G.: Reinforcement Learning: An Introduction, 2nd ed., MIT Press, Cambridge, Massachussetts, ISBN-10: 0262039249, ISBN-13: 978-0262039246, 2018.
Tascioglu, M., Eastman, J. K., and Iyer, R.: The impact of the motivation for status on consumers' perceptions of retailer sustainability: the moderating impact of collectivism and materialism, J. Consum. Mark., 34, 292–305, https://doi.org/10.1108/JCM-03-2015-1351, 2017.
Wagner, W. E.: Commons Ignorance: The Failure of Environmental Law to Produce Needed Information on Health and the Environment, Duke Law J., 53, 1619–1745, http://www.jstor.org/stable/40040450 (last access: 25 March 2024), 2004.
White, R. and Engelen, G.: Cellular automata and fractal urban form: a cellular modelling approach to the evolution of urban land-use patterns, Environ. Plan. A, 25, 1175–1199, https://doi.org/10.1068/a251175, 1993.
Wimolsakcharoen, W., Dumrongrojwatthana, P., Le Page, C., Bousquet, F., and Trébuil, G.: An agent-based model to support community forest management and non-timber forest product harvesting in northern Thailand, Socio-Environmental Syst. Model., 3, 17894, https://doi.org/10.18174/sesmo.2021a17894, 2021.
Wittemyer, G., Daballen, D., and Douglas-Hamilton, I.: Rising ivory prices threaten elephants, Nature, 476, 282–283, https://doi.org/10.1038/476282c, 2011.
Wolfram, S.: A new kind of science, Wolfram media, Champaign, IL, United States, ISBN-10: 1579550258, 2002.