the Creative Commons Attribution 4.0 License.
the Creative Commons Attribution 4.0 License.
 | 06 Apr 2022
| 06 Apr 2022
Coupling a weather model directly to GNSS orbit determination – case studies with OpenIFS
Angel Navarro Trastoy
Sebastian Strasser
Lauri Tuppi
Maksym Vasiuta
Markku Poutanen
Torsten Mayer-Gürr
Heikki Järvinen
Neutral gas atmosphere bends and delays propagation of microwave signals in satellite-based navigation. Weather prediction models can be used to estimate these effects by providing three-dimensional refraction fields to ray-trace the signal delays. In this study, a global numerical weather prediction model (Open Integrated Forecasting System (OpenIFS) licensed for Academic use by the European Centre for Medium-Range Weather Forecast) is used to generate the refraction fields. The ray-traced slant delays are supplied as such – in contrast to mapping – for an orbit solver (GROOPS (Gravity Recovery Object Oriented Programming System) software toolkit of Graz University of Technology) which applies the raw observation method. Here we show that such a close coupling is possible without need for major additional modifications in the solver codes. The main finding here is that the adopted approach provides a very good a priori model for the atmospheric effects on navigation signals. We suspect that removal of the intermediate mapping step allows us to take advantage of the local refraction field asymmetries in the GNSS signal processing. Moreover, the direct coupling helps in identifying deficiencies in the slant delay computation because the modeling errors are not convoluted in the mapping procedures. These conclusions appear robust, despite the relatively small data set of raw code and phase observations covering the core network of 66 ground-based stations of the International GNSS Service over 1-month periods in December 2016 and June 2017. More generally, the new configuration enhances our control of geodetic and meteorological aspects of the orbit problem. This is pleasant because we can, for instance, regulate at will the weather model output frequency and increase coverage of spatiotemporal aspects of weather variations. The direct coupling of a weather model in precise GNSS orbit determination presented in this paper provides a unique framework for benefiting even more widely than previously the apparent synergies in space geodesy and meteorology.
- Article
(700 KB) - Full-text XML
- BibTeX
- EndNote





Refraction in the neutral gas atmosphere bend and delay global navigation system satellite (GNSS) signals (Bevis et al., 1992). These atmospheric effects cannot be deduced based on GNSS measurements alone because the signal propagation is identical for all frequencies typically applied in GNSS. Some auxiliary information is therefore needed to correct these tropospheric effects (Guerova et al., 2016). Global numerical weather prediction (NWP) systems are currently the best source of such support since they ingest tens of millions of observations every day from global meteorological observing systems and constantly update the atmospheric state with the latest data (Bauer et al., 2015).
The state of the art in correcting the tropospheric effects in precise orbit determination (POD) of GNSS is based on the use of mapping functions (e.g., Böhm et al., 2006; Niell, 1996; Rocken et al., 2001; Zus et al., 2014). These are designed to encapsulate essential atmospheric effects by a small number of parameters. The functional form of the Vienna mapping function (VMF3; Landskron and Böhm, 2018), for instance, represents the tropospheric delay effect with three mapping coefficients and has a dependency on the elevation angle but not on the azimuthal angle. This concise representation makes mapping functions generally easy to apply and exchange but also truncates atmospheric information contained in weather models. In particular, they are not designed to represent azimuthal asymmetries, which can be significant, depending on the site and weather of the day (Eresmaa et al., 2007, 2008b).
This article presents a new configuration where a NWP model is directly coupled with a GNSS orbit solver, thus effectively omitting the use of mapping functions. Our aim is to study the impact of loss-less use of weather model data in orbit determination. To this end, we have first analyzed the performance of the tropospheric delays produced by both systems (VMF3 and OpenIFS), providing the so-called “a priori” models. Then we have analyzed the differences of these two models in a real case, by correcting the a priori model by fitting parameters in a least-squares process. To our knowledge, this has not been attempted before on a global scale, but there are some useful early precedents. Nordman et al. (2007, 2009) applied directly the tropospheric slant-path corrections derived from a limited area weather model to a regional network solution of the Global Positioning System (GPS) receivers and reported a neutral-to-positive impact. A fairly similar approach was adopted in Hobiger et al. (2008), who concentrated on precise point positioning in a regional GPS network. Finally, Eriksson et al. (2014) applied tropospheric corrections directly and noticed a sizable improvement in a very long baseline interferometry (VLBI) application by omitting the mapping step. Promisingly, Zus et al. (2014) concluded that computational performance of the best codes to compute tropospheric slant-path corrections is no longer a limiting factor in GNSS processing to side-line the mapping step.
In this study, we have used OpenIFS at an affordable resolution (TL639L91; see Sect. 2.2) and a version of the least-travel-time (LTT) ray tracer used in Eresmaa et al. (2008a). We acknowledge that this setup does not utilize the full potential of production of slant-path corrections yet. Firstly, the LTT ray tracer does not fully follow Rodgers (2000) (see Sect. 2.3), and secondly, the resolution of OpenIFS can be increased further. However, even though a study and improvement of the ray tracer could be done, it is out of the scope of this paper and will be addressed in an upcoming publication, as this setup allows us to experiment with the new configuration. This article is organized as follows. Data and methods are presented in Sect. 2, results in Sect. 3 followed by a discussion in Sect. 4 and the conclusions in Sect. 5.
This section explains the data and methods applied in the new configuration to solve the GNSS orbit problem. It should be noted that all input data and different solver codes reside in the same super-computer, that is CSC – the IT Center for Science in Finland (for system specifications, please see CSC, 2021). Different work flow components (running the weather model, production of the slant delay data, and solving the GNSS orbits) are interlaced but managed as separate tasks. Also, all these components are assembled together as such with no lengthy fine tuning undertaken for obtaining the highest possible performance – neither in terms of computational optimization nor solution accuracy. This constitutes in other words a benchmark system where to build-on further improvements.
2.1 Precise orbit determination
The orbit determination process applied in this study is based on the raw observation approach (Schönemann et al., 2011; Schönemann, 2014) and follows the strategy detailed in Strasser et al. (2019). Raw code and phase observations from a network of 66 well-distributed ground-based stations of the International GNSS Service (IGS; Johnston et al., 2017) to the GPS satellite constellation are utilized to determine a set of geodetic parameters in an iterative least-squares adjustment. These observations are processed in daily batches at a 30 s sampling period (a total of 2880 observation epochs per day) using GROOPS (Mayer-Gürr et al., 2021a), which is an open-source software package for GNSS processing and gravity field determination developed at Graz University of Technology. The observations are connected to the parameters via the code and phase observation equations (e.g., Hauschild, 2017), which encompass corrections for various effects, one of which is the tropospheric influence.
The geometry is contained in the observation equations as the range between satellite and station positions. Satellite orbits are numerically integrated over 24 h based on force models, such as Earth's gravity field, tidal forces, and radiation pressure (see Strasser et al., 2019, for a complete list). These dynamic orbits are then fitted to the observations in the least-squares adjustment by estimating their initial position and velocity as well as a set of solar radiation pressure parameters (Arnold et al., 2015), as this force cannot be modeled adequately in advance. In addition, small instantaneous velocity changes, pseudo-stochastic pulses (e.g., Hugentobler and Montenbruck, 2017), are estimated at the center of each 24 h orbit arc to consider orbit modeling deficiencies. These are not based on physical models but corrections to deficiencies in the calculations.
Next to the orbit parameters, various other parameters are estimated in the least-squares adjustment. These comprise static station positions, Earth orientation parameters, epoch-wise clock errors and constant signal biases at each receiver and satellite, the ionospheric slant total electron content (STEC) per group of observations between a receiver and satellite at one epoch, and phase ambiguities. The ambiguities are resolved to integer values during processing.
Following Petit and Luzum (2010), the tropospheric slant delay for a line-of-sight observation between a satellite and receiver is
Here, e and a are the elevation and azimuth angles at the receiver antenna, Dzh is the zenith hydrostatic delay, Dzw is the zenith wet delay, and GN and GE are the horizontal delay gradients in north–south and east–west directions (the delays are expressed in meters). The mapping functions (mh, mw, and mg) map the delays from zenith to the line-of-sight elevation. The zenith delay mapping function is
where a, b, and c are mapping coefficients (Herring, 1992; Niell, 1996). The gradient mapping function is
with C=0.0031 for the hydrostatic effect and C=0.0007 for the wet effect (Chen and Herring, 1997).
In the default system, a priori tropospheric corrections are based on VMF3 operational data (Landskron and Böhm, 2018). The model provides zenith hydrostatic, zenith wet, hydrostatic gradient, and wet gradient delays as well as corresponding mapping function coefficients (a, b, c) on a global grid at a 6 h sampling period. Values for a specific station location and point in time are bilinearly interpolated from the surrounding grid points in the space domain and linearly interpolated in time. A height correction from orographic height to station height is applied as well (cf. Strasser et al., 2019).
In the experiment, on the other hand, OpenIFS-based slant delay sky-views (see Sect. 2.3) are used to determine a priori tropospheric delays. These sky-views comprise slant delays at a regular azimuth-elevation grid ray-traced directly at the station coordinates with an hourly sampling period. The slant delay for a specific observation is then computed by interpolating the gridded slant delays to the azimuth and elevation of the observation and linearly interpolating in time between the hourly delay values. The interpolation in space domain is done linearly in azimuth direction and using a degree-5 polynomial in elevation direction to properly cover the rapid delay changes at low elevations. Since these slant delays are based directly on a weather model, they include all hydrostatic, wet, and gradient effects and no mapping functions need to be used.
For individual measurements, there is a discrepancy ΔTSD between the a priori tropospheric slant delay and the actual delay affecting the measurement since the models are imperfect. If we assume that ΔTSD is solely due to troposphere, we can write the tropospheric slant delay discrepancy by using Eq. (1) as
Assuming that the hydrostatic delay is well modeled (ΔDzh=0), the residual zenith wet (ΔDzw) and gradient (ΔGN,ΔGE) delay parameters can be set up to consider the discrepancy between modeled and measured tropospheric influence. These station-wise parameters are set up or omitted in this study depending on the analysis. If included, ΔDzw is parameterized as a degree-1 spline with 2-hourly nodes, while ΔGN and ΔGE are parameterized linearly over the 24 h. The mapping functions required for this parametrization are determined using the VMF3 mapping coefficients. The same parametrization is used both in case of VMF3-based or OpenIFS-based a priori slant delays since the parametrization is independent of the a priori model.
2.2 Weather model
OpenIFS is a portable version of the Integrated Forecasting System (IFS) of the European Centre for Medium-Range Weather Forecasts (ECMWF). Essentially, it is a global weather prediction model with identical forecast skill as in the full IFS. Data assimilation is not explicitly included in OpenIFS, but it is included implicitly because external initial conditions of the atmospheric state (temperature, wind, humidity, and surface pressure) are applied. In this study, we use operational atmospheric analyses of ECMWF (Ollinaho et al., 2021) and OpenIFS version 43r3v1 that was part of the operational forecasting system at ECMWF from July 2017 to June 2018 (IFS cycle 43r3; ECMWF, 2019).
We simulate time evolution of the atmospheric state with OpenIFS at horizontal resolution TL639, which corresponds to about 31 km grid spacing at the Equator, and at 91 vertical levels. The model top is at 0.01 hPa, which is approximately at the altitude of 80 km. The model domain thus covers the entire neutral atmosphere of the Earth. The model time step is 15 min and the atmospheric state is output once every hour. For comparison, the ECMWF operational system at the time used 8 km grid spacing at 137 levels (ECMWF, 2019).
Atmospheric states for the hourly refraction computation for the months of December 2016 and June 2017 are formed as follows. A sequence of 12 h forecasts is generated from the 00:00 and 12:00 UTC analyses. Thus, an analysis at 00:00 UTC and forecasts at 01:00, 02:00, …, 11:00 UTC, and correspondingly, an analysis at 12:00 UTC and forecasts at 13:00, 14:00, …, 23:00 UTC provide the hourly coverage for one 24 h period. OpenIFS thus effectively extrapolates the atmospheric analyses to the full hours between the twice-a-day analysis times.
2.3 Slant delays
The tropospheric slant delays are computed with ray tracing based on a least-travel-time (LTT) operator (Eresmaa et al., 2008a). LTT operates on a two-dimensional plane defined by the satellite and receiver positions and the center of the Earth. A two-dimensional refractivity field is obtained by converting the three-dimensional OpenIFS fields of atmospheric dry mass and moisture content to refractivity and interpolating to a desired two-dimensional plane. Interpolation is bi-linear in the horizontal and assumes exponential refractivity profile in vertical between the model levels.
The LTT algorithm performs ray tracing to construct the path, expressed in polar coordinates, which satisfies the following system of differential equations:
Here, ds is a path element, r is distance from the Earth's center, ψ is the counterpart for polar coordinates, θ is the zenith angle, and n is the refractive index. Equations (5a–c) are integrated with the fourth-order Runge–Kutta method starting from the receiver position (; ψrec=0) in the initial direction stated as the geometrical zenith angle of the satellite (θrec=θgeom). The integration ends when the satellite altitude is reached (rend=rsat). The integration yields a set of points (r;ψ) which satisfy these equations.
The total delay on a slanted path results from slowing down of the signal due to refractive index n>1 and increasing signal path length due to signal bending. The path bending is due to the second term in Eq. (5c). Since geometrical zenith angle is used as the initial direction, an angular separation appears between the end point of the ray and the satellite location, i.e., rend=rsat but ψend≠ψsat. Therefore the calculation of the path and slant delay is repeated by using an updated as follows:
In our implementation (Eresmaa et al., 2008a), the final slant delay is a linear combination of these two LTT calculations. This yields an angular difference of the order of rad for zenith angle and rad for . Additional accuracy of the starting zenith angle could be obtained with additional iterations. This implementation does not completely follow Rodgers (2000), and therefore the results are sub-optimal. Efforts are ongoing to improve the LTT implementation, but this is out of the scope of this paper and it will be addressed in a future publication.
The effect of Earth flattening was evaluated for the slant delay computation since the LTT algorithm accounts for the Earth oblateness applying the concept of the Euler radius. The magnitude of this effect was evaluated by degrading the Earth ellipsoid to a sphere thus changing the two-dimensional plane projection onto the Earth surface. The effect was found to vary from −0.5 to +1.5 cm depending on the receiver latitude and antenna azimuth angle.
Here the LTT solver is applied such that instead of computing ray paths exactly in direction of the GNSS satellites in view, so-called sky-views are generated. They are constructed so that slant delays are calculated for zenith angles from 1 to 89∘ and azimuth angles from 0 to 359∘ with 1∘ increments in both directions, added with one calculation for the zenith delay. The sky-views are computed using the OpenIFS data at every full hour in December 2016 and June 2017 for the 66 selected IGS stations constituting the core network.
2.4 Performance metrics
In order to compare the experiments with the default system, the following performance metrics are defined. First, GNSS satellite orbits are determined for 24 h periods. These 24 h orbit arcs overlap at midnight (i.e., 00:00 UTC) between consecutive days, providing two independent positions r (expressed in meters) at a single epoch for each satellite. The differences between these positions are called orbit midnight discontinuities, as they represent jumps between two smooth orbit arcs.
The discontinuity δr in the orbit position between consecutive days has components along (δra) and across (δrc) the orbit direction and a radial (δrr) component in the local vertical. Running GROOPS using only a priori models (i.e., not estimating any corrections through fitted parameters according to Eq. 4) and analyzing the discontinuities we can compare the goodness of the models – the smaller the discontinuities, the better the a priori modeling. The associated performance metric is defined as follows:
for each satellite at each day boundary.
Second, as a part of the orbit determination, the a priori model for the troposphere can be corrected by fitting parameters in the least-squares process (Eq. 4), producing the so-called a posteriori model. The fitted residual zenith wet delay (ΔDzw) and gradient delays (ΔGN and ΔGE) are indicative of the goodness of the a priori model used – the smaller the corrections, the better the accuracy of the a priori model.
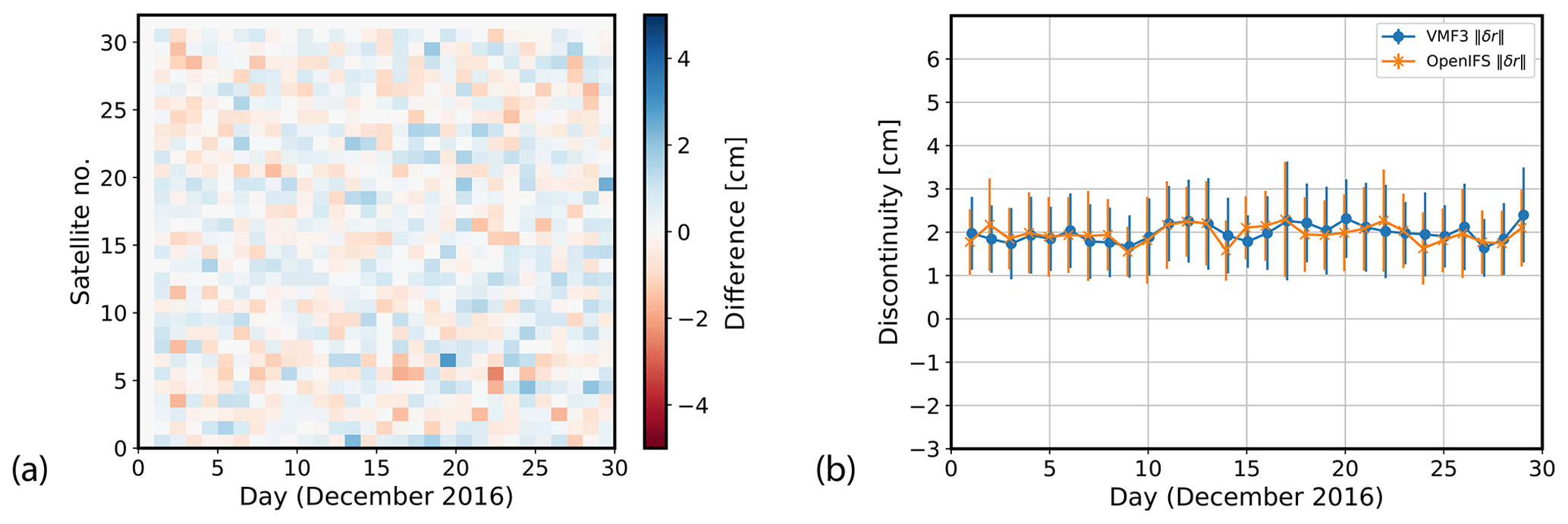
Figure 1Norm of the midnight discontinuity () for December 2016. (a) A color map representing the difference between the default and experimental system for the satellites used in the experiment. (b) The mean (solid lines) and standard deviation (vertical whiskers) over all satellites for each day of the experiment with blue (default system) and orange (experimental system).
The following results aim to demonstrate how the newly assembled experimental configuration (OpenIFS) performs in relation to a well-established default system (VMF3). According to the performance metrics explained in Sect. 2.4, an analysis over the midnight discontinuities has been carried out, along with a study of the fitted parameters for the month of December 2016. To add statistical confidence to the results, we have also evaluated the month of June 2017 (Appendix A). It is hoped that the results are indicative of the strengths and weaknesses of the experimental configuration, thus pointing to potential areas of further development.
3.1 Orbit midnight discontinuities
The orbit midnight discontinuities are a good metric to analyze how any factor, for instance tropospheric modeling, affects the quality of GNSS products. Figure 1a shows a color map where each cell represents the difference in the midnight discontinuity between the a priori default and experiment systems for a satellite over two consecutive days, as measured with (see Eq. 7) and expressed in units of centimeters. Here, blue (red) means that discontinuities in the experimental system are smaller (larger) than in the default system.
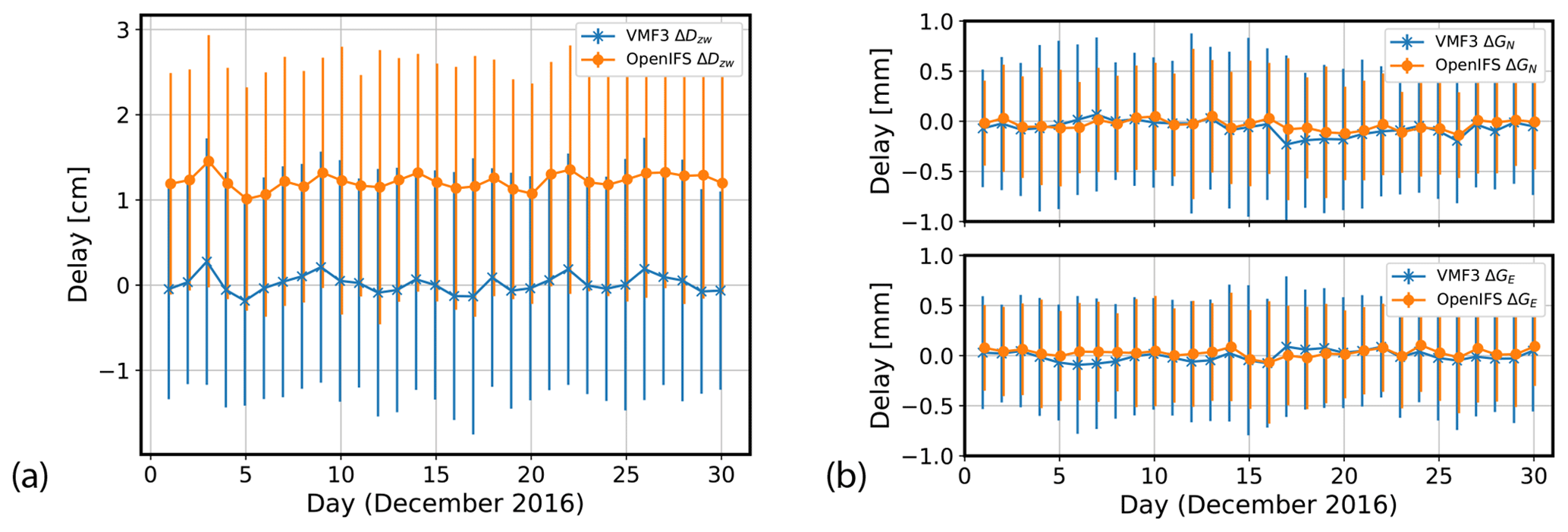
Figure 2The mean and standard deviation of the fitted parameters: (a) zenith wet delay (ΔDzw) and (b) north and east gradient delays (ΔGN on top and ΔGE at the bottom) for the a priori models for December 2016. Notation is as in Fig. 1.
The differences in Fig. 1a are generally very small, of the order of a few centimeters. The mean covering all satellites over the whole period is 0.025 cm, pointing to slightly smaller discontinuities in the experimental system, although statistically negligible.
Next is shown a time series of the mean values of the norm for all satellites (Fig. 1b), where the default system is in blue and the experiment in orange. Again, the results indicate that the experimental system has slightly smaller discontinuities. The mean values for the entire month are 1.961 cm for the experimental system and 1.986 cm for the default system. This difference, albeit small, is a rather systematic feature in Fig. 1b. Standard deviation around the mean value is 0.903 cm in the experimental system and 0.907 cm in the default system, showing a similar behavior for both systems. The results presented in this section have been calculated not using Satellite G04 data due to malfunctions in the satellite or satellite-specific processing issues that are unrelated to tropospheric modeling, which were deteriorating the results for both systems used in the experiment.
3.2 Fitted tropospheric parameters
Next, the magnitude of the fitted parameters (ΔDzw, ΔGN, and ΔGE) is analyzed. Figure 2a shows the residual zenith wet delay (ΔDzw) for both systems (default in blue, experiment in orange) over the month of December 2016. Each day is represented by the mean and standard deviation of all estimated values for all the stations used.
The mean fitted zenith wet delay (Fig. 2a) is 1.220 cm in the experimental system and 0.016 cm in the default system. This is indicative of a severe and consistent positive bias in the experimental system while it is negligible for the default system. The positive bias can be interpreted such that in the experimental system the total slant delay is too small (i.e., the increased zenith wet delay compensates this deficiency in the least-squares process). The possible reasons for the bias are further discussed in Sect. 4.
The standard deviation of fitted zenith wet delay values (Fig. 2a) is 1.391 cm in the experimental system and 1.349 cm in the default system over the whole month. This is indicative of the somewhat similar consistency of the default and experimental systems – despite the apparent bias, the variation of the fitted zenith wet delay values is similar to the default system.
The fitted gradient delays in the north and east directions are presented in Fig. 2b. The mean values over the month of December 2016 for ΔGN and ΔGE are very similar in both systems, −0.035 and 0.028 mm for the experiment and −0.067 and −0.003 mm for the default system. The standard deviations around these mean values are somewhat smaller in the experimental system, 0.527 and 0.489 mm for the experiment and 0.706 and 0.602 mm for the default system, suggesting a marginal advantage over the default system.
3.3 Statistical significance of the experimental results
In order to add confidence to the results presented here, the experiment was repeated for the month of June 2017. This period covers a different phase of the Earth on its orbit around the sun, and thus generally different circumstances for the orbit problem. The central results are presented in Appendix A and can be summarized as being very similar compared to the main study period. The conclusion is thus that the main study period of December 2016 seems to be representative for this type of study.
The default system of this study applies VMF3 delays and mapping function coefficients, which are computed from the ECMWF weather forecasts. The operational model version in December 2016 had very high resolution, about 8 km grid spacing at 137 model levels. The disseminated forecast fields for VMF3 computation are, however, interpolated from the full model resolution to horizontal resolution at 25 standard pressure levels, which are available at 6-hourly intervals. Lastly, VMF3 coefficients can be interpreted as a low-order representation of the tropospheric delay which does not represent, by design, azimuthal asymmetries in a receiver station sky-view. Despite these processing features, which all imply some loss of atmospheric information, VMF3 has proven to provide a hard-to-beat benchmark also in this study.
The experimental system applies a lower-resolution OpenIFS model version with about 31 km grid spacing at 91 levels, which rather closely corresponds to the system applied in ensemble prediction at ECMWF. In this respect, the default system has a clear advantage in terms of simulation accuracy of atmospheric dynamics and physical processes. On the other hand, the subsequent processing in the experimental system is almost loss-less. We do interpolate the total tropospheric delay from a 1∘ by 1∘ sky-view to azimuth and elevation angles of an individual measurement and interpolate in time from 1-hourly model output fields to the measurement time. Other than that, the native OpenIFS refraction field is represented as such through the ray tracing step to the orbit solver. Technically, the ray tracing could be solved separately and directly corresponding to the azimuth and elevation angles of each measurement – in this case, time interpolation should also be omitted by gathering the measurements into time slots closest to the model output time. Note that the OpenIFS model time step is 15 min in the experimental system, and atmospheric fields could be output at the same frequency to reduce time interpolation effects.
Figure 2a is indicative of a sizable bias in the tropospheric a priori correction based on OpenIFS, where ΔDzw is at the level of 0.73 cm throughout the period. This result prompted us to investigate more closely the total delay mean differences between VMF3 and OpenIFS. Indeed, at very low elevation angles the total delay in the experimental system differs systematically from the default system. This is very likely due to an approximation made in the LTT code regarding the geometrical effect on the signal path where the term in Eq. (5c) is missing. Therefore, the LTT ray tracer applied in the experimental system does not fully follow Rodgers (2000) and is sub-optimal. Work is ongoing to update the code. Importantly, the experimental system provides us with a solid reference where the weather model-based data are directly interfaced with GNSS measurements and orbit solutions with no intermediate and possibly obscuring processing steps. Thanks to this property, it led us to detect the problem with the implemented ray tracing code.
The following question remains. Figure 2 tends to suggest that the tropospheric a priori model in the experimental system is biased. How is it then possible that midnight discontinuities (Fig. 1) are comparable or even slightly smaller in the experimental system compared to the default system? A possible explanation is that the azimuthal asymmetries of the tropospheric delay that are present in the experimental system but are missing from the default system do matter and contribute to the orbit solutions. Essentially, the asymmetries are not systematic but they can systematically impact the system performance and the metrics presented here.
Finally, we have to keep in mind that only a small network of 66 stations are included in this study over a limited time period. A more comprehensive experiment will be prepared later including better GNSS station coverage and enhanced tropospheric modeling. Our hypothesis is that in such a system, more atmospheric information is introduced in near-native format to the orbit problem, which improves the solution accuracy.
The troposphere and stratosphere delay the propagation of navigation satellite signals and can lead to large errors in GNSS satellite orbit determination if not properly accounted for. In this article, a global numerical weather prediction model – OpenIFS of the European Centre for Medium-Range Weather Forecasts – is applied to generate atmospheric data of pressure, temperature, and humidity. These are converted to three-dimensional atmospheric refraction fields and used as an input for ray-tracing to solve the least travel time signal paths from satellites to receiver stations and to compute the associated delays. These delays are then directly used as a priori corrections of the atmospheric effects to solve GNSS satellite orbits with the GROOPS software toolkit of Graz University of Technology, Austria.
This new configuration to solve the GNSS orbit problem contains two novel aspects. First, the direct use of tropospheric delays on slanted signal paths allows us to fully account for the azimuthal asymmetries in the atmospheric refraction field, in contrast to traditional mapping functions which regularize the refraction field. Second, the intimate coupling of the numerical weather prediction model with the orbit solver allows us to control the information flow between the two modules, including output frequency of the weather model, for instance.
The main finding here is that the new configuration provides good consistency of GNSS satellite orbits as measured with the so-called orbit midnight discontinuities, i.e., how much satellite orbit initial positions need to be corrected between subsequent 24 h orbit solutions. Another important finding is that the new configuration provides a solid reference where weather model-based data are directly interfaced with GNSS measurements and orbit solutions. Since the new configuration has fewer intermediate processing steps than the state-of-the-art methods, more direct diagnosis of the system performance is possible. In particular, this led us to detect a bias in our ray tracing computation that was undetected until now. Finally, the results indicate that azimuthal asymmetries in the tropospheric delays, which are well-preserved in the new configuration, contribute to the accuracy of orbit solutions. These asymmetries are not systematic but they have a systematic impact on the orbit solutions.
At a more general level, the new configuration provides an enhanced control of geodetic and meteorological aspects of the orbit problem. This will allow us to widely benefit from the apparent synergies in space geodesy and meteorology.
The experimental results for the month of June 2017 are presented here. The experimental setup is identical to the experiment covering the month of December 2016. The central results, following the presentation of Sect. 2.4, are shown below.
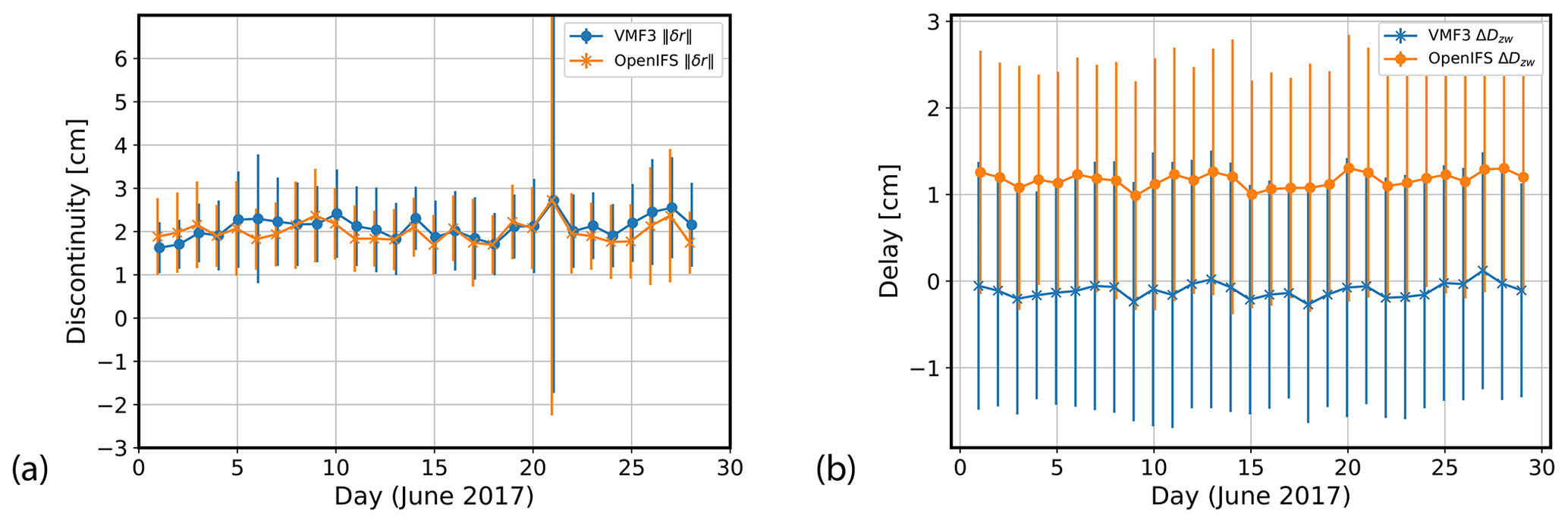
Figure A1Daily means of (a) the midnight discontinuities and (b) the fitted zenith wet delays (ΔDzw) of the default model (blue) and the experiment model (orange) for the month of June 2017.
Figure A1a can be compared to Fig. 1b, showing the daily mean of the midnight discontinuities of the a priori systems for the month. The overall means and standard deviations for the months of December 2016 and June 2017 are (1.961±0.903) and (1.996±1.028) cm for the experimental system and (1.986±0.907) and (2.102±1.034) cm for the default system.
Figure A1b can be compared to Fig. 2a, showing the fitted parameters of the zenith wet delay (ΔDzw). The bias in the experimental system for December 2016 (Fig. 2a) appears to be at a similar level in June 2017. The overall mean and standard deviation in the experimental system is (1.220±1.391) cm for December 2016 and (1.168±1.371) cm for June 2017. On the other hand, the negligible bias (10−2 cm) in the default system in December 2016 seems to be slightly moved to negative for June 2017, although the overall standard deviation is very similar: (0.016±1.349) cm for December 2016 and cm for June 2017.
The source code of GROOPS is openly available on GitHub (https://github.com/groops-devs/groops; Mayer-Gürr et al., 2021b) and in Mayer-Gürr et al. (2021a). A license for using OpenIFS NWP model can be requested from ECMWF user support (openifs-support@ecmwf.int), and the model can be downloaded from the ECMWF FTP site (ftp://ftp@ftp.ecmwf.int:/pub/openifs/ifsdata/, last access: March 2021). The LTT operator used in this study is available on Zenodo under a Creative Commons Attribution 4.0 International license (https://doi.org/10.5281/zenodo.4834411; Eresmaa et al., 2021).
Availability of the OpenIFS initial states is described in Ollinaho et al. (2021). GNSS observation data are kindly provided by the IGS via its data centers (https://igs.org/data-products-overview, last access: March 2021).
ANT performed the experimentation and most of the data analysis. SS prepared and supervised the experimentation. LT ran the OpenIFS model and post-processed slant delay data. MV made the slant delay sensitivity analyses, maintained the LTT operator, and participated in production of the slant delay data. MP supported development of the concept. TMG provided in-depth expertise in the experimental design and supervised in all aspects of the project. HJ supervised in all aspects of the project as its originator. All authors contributed to writing with coordination of HJ.
The contact author has declared that neither they nor their co-authors have any competing interests.
Publisher's note: Copernicus Publications remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
We gratefully acknowledge support of the Doctoral Programme in Atmospheric Sciences in the University of Helsinki and funding received from the Academy of Finland (grant number 1333034); the Vilho, Yrjö and Kalle Väisälä Foundation; and the Austrian Research Promotion Agency (FFG) under the Austrian Space Applications Programme (ASAP) Phase 16 (project number 878886). We would like to thank the CSC – IT Center for Science in Finland – for their support in high-performance computing. Juha Lento from CSC is warmly acknowledged for his support and advice in implementing GROOPS in a massively parallel computing environment.
This research has been supported by the Academy of Finland (grant no. 1333034).
Open-access funding was provided by the Helsinki University Library.
This paper was edited by Volker Grewe and reviewed by two anonymous referees.
Arnold, D., Meindl, M., Beutler, G., Dach, R., Schaer, S., Lutz, S., Prange, L., Sośnica, K., Mervart, L., and Jäggi, A.: CODE's new solar radiation pressure model for GNSS orbit determination, J. Geodesy, 89, 775–791, https://doi.org/10.1007/s00190-015-0814-4, 2015. a
Bauer, P., Thorpe, A., and Brunet, G.: The quiet revolution of numerical weather prediction, Nature, 525, 47–55, https://doi.org/10.1038/nature14956, 2015. a
Bevis, M., Businger, S., Herring, T., Rocken, C., Anthes, R., and Ware, R.: GPS Meteorology: Remote Sensing of Atmospheric Water Vapour Using the Global Positioning System, J. Geophys. Res., 97, 15787–15801, https://doi.org/10.1029/92JD01517, 1992. a
Böhm, J., Niell, A., Tregoning, P., and Schuh, H.: Global Mapping Function (GMF): A new empirical mapping function based on numerical weather model data, Geophys. Res. Lett., 33, L07304, https://doi.org/10.1029/2005GL025546, 2006. a
Chen, G. and Herring, T. A.: Effects of atmospheric azimuthal asymmetry on the analysis of space geodetic data, J. Geophys. Res.-Sol. Ea., 102, 20489–20502, https://doi.org/10.1029/97JB01739, 1997. a
CSC: CSC user guide, https://docs.csc.fi/computing/available-systems/ (last access: February 2021), 2021. a
ECMWF: Changes in ECMWF model, https://www.ecmwf.int/en/forecasts/documentation-and-support/changes-ecmwf-model (last access: August 2021), 2019. a, b
Eresmaa, R., Järvinen, H., Niemelä, S., and Salonen, K.: Asymmetricity of ground-based GPS slant delay data, Atmos. Chem. Phys., 7, 3143–3151, https://doi.org/10.5194/acp-7-3143-2007, 2007. a
Eresmaa, R., Healy, S., Järvinen, H., and Salonen, K.: Implementation of a ray-tracing operator for ground-based GPS Slant Delay observation modeling, J. Geophys. Res.-Atmos., 113, D11114, https://doi.org/10.1029/2007JD009256, 2008a. a, b, c
Eresmaa, R., Järvinen, H., Nordman, M., Poutanen, M., and Luntama, J.-P.: Parameterization of tropospheric delay correction for mobile GNSS positioning: a case study of a cold front passage, Meteorol. Appl., 15, 447–454, https://doi.org/10.1002/met.86, 2008b. a
Eresmaa, R., Healy, S., and Tuppi, L.: Least travel time (LTT) operator, Zenodo [code], https://doi.org/10.5281/zenodo.4834412, 2021. a
Eriksson, D., MacMillan, D., and Gipson, J.: Tropospheric delay ray tracing applied in VLBI analysis, J. Geophys. Res.-Sol. Ea., 119, 9156–9170, https://doi.org/10.1002/2014JB011552, 2014. a
Guerova, G., Jones, J., Douša, J., Dick, G., de Haan, S., Pottiaux, E., Bock, O., Pacione, R., Elgered, G., Vedel, H., and Bender, M.: Review of the state of the art and future prospects of the ground-based GNSS meteorology in Europe, Atmos. Meas. Tech., 9, 5385–5406, https://doi.org/10.5194/amt-9-5385-2016, 2016. a
Hauschild, A.: Basic Observation Equations, in: Springer Handbook of Global Navigation Satellite Systems, edited by: Teunissen, P. J. and Montenbruck, O., Springer Handbooks, Springer International Publishing, Cham, 561–582, https://doi.org/10.1007/978-3-319-42928-1_19, 2017. a
Herring, T. A.: Modeling atmospheric delays in the analysis of space geodetic data, in: Proceedings of Refraction of Transatmospheric Signals in Geodesy, edited by: DeMunck, J. C. and Spoelstra, T. A. T., vol. 36 of Netherlands Geodetic Commission Series, The Hague, Netherlands, 57–164, 1992. a
Hobiger, T., Ichikawa, R., Takasu, T., Koyama, Y., and Kondo, T: Ray-traced troposphere slant delays for precise point positioning, Earth Planets Space, 60, e1–e4, https://doi.org/10.1186/BF03352809, 2008. a
Hugentobler, U. and Montenbruck, O.: Satellite Orbits and Attitude, in: Springer Handbook of Global Navigation Satellite Systems, edited by: Teunissen, P. J. and Montenbruck, O., Springer Handbooks, Springer International Publishing, Cham, 59–90, https://doi.org/10.1007/978-3-319-42928-1_3, 2017. a
Johnston, G., Riddell, A., and Hausler, G.: The International GNSS Service, in: Springer Handbook of Global Navigation Satellite Systems, edited by: Teunissen, P. J. and Montenbruck, O., Springer Handbooks, Springer International Publishing, Cham, 967–982, https://doi.org/10.1007/978-3-319-42928-1_33, 2017. a
Landskron, D. and Böhm, J.: VMF3/GPT3:refined discrete and empirical troposphere mapping functions, J. Geodesy, 92, 349–360, https://doi.org/10.1007/s00190-017-1066-2, 2018. a, b
Mayer-Gürr, T., Behzadpour, S., Eicker, A., Ellmer, M., Koch, B., Krauss, S., Pock, C., Rieser, D., Strasser, S., Suesser-Rechberger, B., Zehentner, N., and Kvas, A.: GROOPS: A software toolkit for gravity field recovery and GNSS processing, Comput. Geosci., 155, 104864, https://doi.org/10.1016/j.cageo.2021.104864, 2021a. a, b
Mayer-Gürr, T., Behzadpour, S., Eicker, A., Ellmer, M., Koch, B., Krauss, S., Pock, C., Rieser, D., Strasser, S., Süsser-Rechberger, B., Zehentner, N., and Kvas, A.: GROOPS: A software toolkit for gravity field recovery and GNSS processing, https://github.com/groops-devs/groops (last access: March 2021), GitHub [code], 2021b. a
Niell, A.: Global mapping functions for the atmosphere delay at radio wavelengths, J. Geophys. Res., 101, 3227–3246, 1996. a, b
Nordman, M., Eresmaa, R., Poutanen, M., Järvinen, H., Koivula, H., and Luntama, J.-P.: Using numerical weather prediction model derived tropospheric slant delays in GPS processing: a case study, Geophysica, 43, 49–57, 2007. a
Nordman, M., Eresmaa, R., Boehm, J., Poutanen, M., Koivula, H., and Järvinen, H.: Effect of troposphere slant delays on regional double difference GPS processing, Earth Planets Space, 61, 845–852, 2009. a
Ollinaho, P., Carver, G. D., Lang, S. T. K., Tuppi, L., Ekblom, M., and Järvinen, H.: Ensemble prediction using a new dataset of ECMWF initial states – OpenEnsemble 1.0, Geosci. Model Dev., 14, 2143–2160, https://doi.org/10.5194/gmd-14-2143-2021, 2021. a, b
Petit, G. and Luzum, B. (Eds.): IERS Conventions (2010), IERS Technical Note 36, Verlag des Bundesamts für Kartographie und Geodäsie, Frankfurt am Main, https://www.iers.org/IERS/EN/Publications/TechnicalNotes/tn36.html (last access: February 2021), 2010. a
Rocken, C., Sokolovskiy, S., Johnson, J. M., and Hunt, D.: Improved mapping of tropospheric delays, J. Atmos. Ocean. Tech., 18, 1205–1213, 2001. a
Rodgers, C. D.: Inverse Methods for Atmospheric Sounding, Theory and Practice, 2, 256 pp., https://doi.org/10.1142/3171, 2000. a, b, c
Schönemann, E.: Analysis of GNSS raw observations in PPP solutions, Schriftenreihe der Fachrichtung Geodäsie, 42, https://tuprints.ulb.tu-darmstadt.de/3843/ (last access: February 2021), 2014. a
Schönemann, E., Becker, M., and Springer, T.: A new Approach for GNSS Analysis in a Multi-GNSS and Multi-Signal Environment, Journal of Geodetic Science, 1, 204–214, https://doi.org/10.2478/v10156-010-0023-2, 2011. a
Strasser, S., Mayer-Gürr, T., and Zehentner, N.: Processing of GNSS constellations and ground station networks using the raw observation approach, J. Geodesy, 93, 1045–1057, https://doi.org/10.1007/s00190-018-1223-2, 2019. a, b, c
Zus, F., Dick, G., Dousa, J., Heise, S., and Wickert, J.: The rapid and precise computation of GPS slant total delays and mapping factors utilizing a numerical weather model, Radio Sci., 49, 207–216, https://doi.org/10.1002/2013RS005280, 2014. a, b